1. Introduction
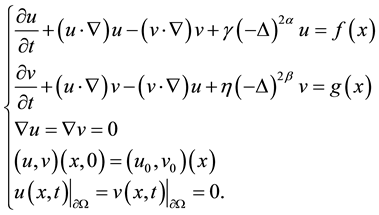
In [1] , Yuan, Guo and Lin prove the existence of global attractors and dimension estimation of a 2D genera- lized magnetohydrodynamic (MHD) system:
 (1.1)
(1.1)
where u is the fluid velocity field, v is the magnetic field,  is the constant kinematic viscosity and
is the constant kinematic viscosity and  is constant magnetic diffusivity.
is constant magnetic diffusivity.  is a bounded domain with a sufficiently smooth boundary
is a bounded domain with a sufficiently smooth boundary ,
, . More results about inertial manifolds can be founded in [2] - [11] .
. More results about inertial manifolds can be founded in [2] - [11] .
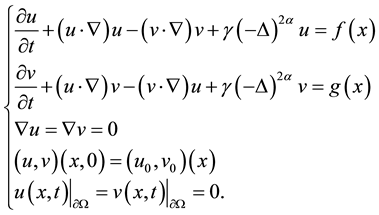
In this paper, we consider the following 2D generalized MHD system:
 (1.2)
(1.2)
where u is the fluid velocity field, v is the magnetic field,  is the constant kinematic viscosity and
is the constant kinematic viscosity and  is the constant magnetic diffusivity.
is the constant magnetic diffusivity.  is a bounded domain with a sufficiently smooth boundary
is a bounded domain with a sufficiently smooth boundary ,
,  .
.
This paper is organized as follows. In Section 2, we introduce basic concepts concerning inertial manifolds. In Section 3, we obtain the existence of the inertial manifolds.
2. Preliminaries
We rewrite the problem (1.2) as a first order differential equation, the problem (1.2) is equivalent to:
 (2.1)
(2.1)
where ,
,  , and
, and

Let H is a Banach space, ![]() ,
, ![]() is norm of H,
is norm of H, ![]() is inner product of H,
is inner product of H, ![]() ;
;![]() , for any solution
, for any solution ![]() of the problem (2.1),
of the problem (2.1), ![]() ,
, ![]() is norm of
is norm of![]() .
.
Definition 2.1. Suppose ![]() denote the semi-group of solutions to the problem (2.l) in
denote the semi-group of solutions to the problem (2.l) in![]() , subset M is an inertial manifolds of the problem (2.l), that is M satisfying the following properties:
, subset M is an inertial manifolds of the problem (2.l), that is M satisfying the following properties:
1. M is a finite dimensional Lipshitz manifold;
2. M is positively invariant under![]() , that is,
, that is, ![]() for all
for all![]() ;
;
3. M is attracts every trajectory exponentially, i.e., for every![]() ,
,
![]()
We now recall some notions. Let ![]() is a closed linear operator on
is a closed linear operator on ![]() satisfying the following Standing Hypothesis 2.2.
satisfying the following Standing Hypothesis 2.2.
Standing Hypothesis 2.2. We suppose that ![]() is a positive definite, self-adjoint operator with a discrete spectrum,
is a positive definite, self-adjoint operator with a discrete spectrum, ![]() compacts in
compacts in![]() . Assume
. Assume ![]() is the orthonormal basis in
is the orthonormal basis in ![]() consisting of the corresponding eigenfunctions of the operator
consisting of the corresponding eigenfunctions of the operator![]() . Say
. Say
![]() (2.2)
(2.2)
![]() each with finite multiplicity and
each with finite multiplicity and![]() .
.
Let now ![]() and
and ![]() be two successive and different eigenvalues with
be two successive and different eigenvalues with![]() , let further P be the orthogonal projection onto the first N eigenvectors of the operator
, let further P be the orthogonal projection onto the first N eigenvectors of the operator![]() .
.
Let the bound absorbing set![]() , we define a smooth truncated function by setting
, we define a smooth truncated function by setting ![]() is defined as
is defined as
![]() (2.3)
(2.3)
Suppose that ![]() the problem (2.1) is equivalent to the following preliminary equation:
the problem (2.1) is equivalent to the following preliminary equation:
![]() (2.4)
(2.4)
Denote by ![]() is the orthogonal projection of H onto
is the orthogonal projection of H onto![]() , and
, and![]() . Set
. Set![]() , then Equation (2.4) is equivalent to
, then Equation (2.4) is equivalent to
![]() (2.5)
(2.5)
![]() (2.6)
(2.6)
Lemma 2.3. Defined by ![]() of the problem (2.1) on the bounded set of
of the problem (2.1) on the bounded set of ![]() is a Lipschitz function, for every
is a Lipschitz function, for every![]() , there exist a constant
, there exist a constant ![]() such that
such that
![]() (2.7)
(2.7)
where![]() .
.
Proof. Assume![]() , and let
, and let![]() , use the fact that
, use the fact that ![]() and using Poincare inequality
and using Poincare inequality![]() , we have
, we have
![]() (2.8)
(2.8)
where![]() , so we can get
, so we can get
![]() (2.9)
(2.9)
Lemma 2.3 is proved. ![]()
Lemma 2.4. Let ![]() be fixed, for any
be fixed, for any ![]() and all
and all![]() , there exist
, there exist ![]() such that
such that
![]() (2.10)
(2.10)
otherwise, there exist constants ![]() and
and ![]() are dependent on
are dependent on ![]() such that
such that
![]() (2.11)
(2.11)
and
![]() (2.12)
(2.12)
for all ![]()
Proof. Let ![]() with initial values
with initial values ![]() respectively, are two different solutions of the problem (2.1), we have the fact that
respectively, are two different solutions of the problem (2.1), we have the fact that![]() ,
,![]() . Put
. Put![]() , so we obtain that
, so we obtain that
![]() (2.13)
(2.13)
Putting
![]() (2.14)
(2.14)
For![]() , taking the derivative of Equation (2.14) with respect to t,we have
, taking the derivative of Equation (2.14) with respect to t,we have
![]() (2.15)
(2.15)
From Equation (2.13) and Equation (2.15), we have
![]() (2.16)
(2.16)
We notice that Equation (2.14)
![]()
so we have
![]() (2.17)
(2.17)
By Equation (2.16) and Equation (2.17), and use the Cauchy-Schwarz inequality, we obtain
![]() (2.18)
(2.18)
Then using Lemma 2.3,we have
![]()
For![]() , integrating the above inequality over
, integrating the above inequality over![]() , we obtain
, we obtain
![]() (2.19)
(2.19)
where ![]() is given as in Lemma 2.3.
is given as in Lemma 2.3.
By multiplying (2.13) by![]() , using Cauchy-Schwarz inequality and Lemma 2.3, we have
, using Cauchy-Schwarz inequality and Lemma 2.3, we have
![]() (2.20)
(2.20)
Using Holder inequality, from Equation (2.20) we have
![]() (2.21)
(2.21)
In Equation (2.19) setting![]() , we obtain
, we obtain
![]() (2.22)
(2.22)
where
![]() (2.23)
(2.23)
By Equation (2.21) and Equation (2.22), we have
![]() (2.24)
(2.24)
Integrating Equation (2.24) between 0 and![]() , we obtain
, we obtain
![]() (2.25)
(2.25)
To complete the proof of Lemma 2.4, we consider the following two cases,
![]() (2.26)
(2.26)
and
![]() (2.27)
(2.27)
We only consider Equation (2.26), in this case,
![]() (2.28)
(2.28)
where ![]() is N + 1 eigenvector of the operator
is N + 1 eigenvector of the operator![]() . By Equation (2.25) and Equation (2.28), we obtain
. By Equation (2.25) and Equation (2.28), we obtain
![]() (2.29)
(2.29)
since![]() , in Equation (2.29) setting
, in Equation (2.29) setting![]() , which proves Equation (2.11), where
, which proves Equation (2.11), where ![]() and
and![]() . Using again Equation (2.20), we have
. Using again Equation (2.20), we have
![]()
then we obtain
![]() (2.30)
(2.30)
Integrating Equation (2.30) between 0 and![]() , which proves Equation (2.12). Lemma 2.4 is proved.
, which proves Equation (2.12). Lemma 2.4 is proved. ![]()
3. Inertial Manifolds
In this section we will prove the existence of the inertial manifolds for solutions to the problem (2.1). We suppose that ![]() satisfies Standing Hypothesis 2.2 and recall that P is the orthogonal projection onto the first N orthonormal eigenvectors of
satisfies Standing Hypothesis 2.2 and recall that P is the orthogonal projection onto the first N orthonormal eigenvectors of![]() .
.
Let constants ![]() be fixed, we define
be fixed, we define ![]() and denote the collection of all functions
and denote the collection of all functions ![]() satisfies
satisfies
![]() (3.1)
(3.1)
Note that
![]() (3.2)
(3.2)
is the distance of![]() . So
. So ![]() is completely space.
is completely space.
For every ![]() and the initial data
and the initial data![]() , the initial value problem
, the initial value problem
![]() (3.3)
(3.3)
possesses a unique solution![]() .
.
![]() (3.4)
(3.4)
where ![]() and the unique solution
and the unique solution ![]() in Equation (3.4) is a successive bounded mapping acts from
in Equation (3.4) is a successive bounded mapping acts from ![]() into
into![]() . Particularly, the function
. Particularly, the function
![]() (3.5)
(3.5)
by![]() , note that
, note that![]() , we have
, we have
![]() (3.6)
(3.6)
We need to prove the following two conclusions:
1. For ![]() and
and ![]() are sufficiently large,
are sufficiently large, ![]() is a contraction.
is a contraction.
2. ![]() is a unique fixed point in T,
is a unique fixed point in T, ![]() is a inertial manifold of 2D generalized MHD system.
is a inertial manifold of 2D generalized MHD system.
So we give the following Lemmas.
Lemma 3.1. Let![]() , so we have
, so we have
![]() (3.7)
(3.7)
Proof. The proof is similar to Temam [3] . ![]()
Lemma 3.2. Let![]() , for
, for![]() , there exists constant
, there exists constant ![]() such that
such that
![]() (3.8)
(3.8)
and
![]() (3.9)
(3.9)
Proof. For any ![]() and
and![]() , we denote
, we denote![]() , using Lemma 2.3 and see ([3] , Chapter 8: Lemma 2.1 and Lemma 2.2), we derive that there exists constant
, using Lemma 2.3 and see ([3] , Chapter 8: Lemma 2.1 and Lemma 2.2), we derive that there exists constant ![]() such that
such that
![]() (3.10)
(3.10)
and
![]() (3.11)
(3.11)
which proves Equation (3.8). We now prove Equation (3.9), by the definition of![]() , we have
, we have
![]() (3.12)
(3.12)
And we have
![]() (3.13)
(3.13)
Substituting Equation (3.13) into Equation (3.11) we obtain Equation (3.9). Lemma 3.2 is proved. ![]()
Lemma 3.3. Let![]() , one has
, one has ![]() and
and ![]() where
where ![]() for
for ![]() is sufficiently large one has
is sufficiently large one has![]() .
.
Proof. Let![]() , according to the definition of
, according to the definition of![]() , we have
, we have![]() , from Equation (3.6) and Equation (3.10), we have
, from Equation (3.6) and Equation (3.10), we have
![]() (3.14)
(3.14)
Let ![]() and
and![]() , suppose that
, suppose that ![]() and
and
![]()
So we obtain
![]() (3.15)
(3.15)
Further more, for![]() , we have
, we have
![]() (3.16)
(3.16)
Setting ![]() in
in![]() , then substituting
, then substituting ![]() into Equation (3.15) and Equation (3.16), and from Equation (3.14) we can derive that
into Equation (3.15) and Equation (3.16), and from Equation (3.14) we can derive that
![]() (3.17)
(3.17)
Lemma 3.3 is proved. ![]()
Lemma 3.4. Let
![]() (3.18)
(3.18)
so for every![]() , one has
, one has
![]() (3.19)
(3.19)
here
![]() (3.20)
(3.20)
![]() (3.21)
(3.21)
![]() (3.22)
(3.22)
Proof. For any given![]() , let
, let ![]() are the solutions of the following initial value problem,
are the solutions of the following initial value problem,
![]() (3.23)
(3.23)
and
![]() (3.24)
(3.24)
here ![]() Suppose that
Suppose that![]() , so we have
, so we have
![]() (3.25)
(3.25)
Multiplying the first equation in Equation (3.25) by![]() , using Equation (3.9) in Lemma 3.2, we obtain
, using Equation (3.9) in Lemma 3.2, we obtain
![]() (3.26)
(3.26)
So we have
![]() (3.27)
(3.27)
For![]() , from Equation (3.27) we have
, from Equation (3.27) we have
![]() (3.28)
(3.28)
By Lemma 2.3, to do the following estimate,using Equation (3.11) and Equation (3.28) we obtain
![]() (3.29)
(3.29)
here![]() . From Equation (3.15), we have
. From Equation (3.15), we have
![]() (3.30)
(3.30)
here![]() .
.
Hence,
![]() (3.31)
(3.31)
Then from Equation (3.15) we have
![]() (3.32)
(3.32)
Combining Equation (3.31) and Equation (3.32), we obtain
![]() (3.33)
(3.33)
Substituting Equation (3.33) into Equation (3.29), we obtain
![]()
Lemma 3.4 is proved. ![]()
Lemma 3.5. Let ![]() is defined as in Lemma 3.4, for all
is defined as in Lemma 3.4, for all![]() ,
,
![]() (3.34)
(3.34)
here ![]()
![]() is defined by Equation (3.20),
is defined by Equation (3.20), ![]() is defined by Equation (3.2).
is defined by Equation (3.2).
Proof. Let ![]() and let
and let ![]() is the solution of the initial value problem (3.25), then by the same way as in Lemma 3.2 we can prove that
is the solution of the initial value problem (3.25), then by the same way as in Lemma 3.2 we can prove that
![]() (3.35)
(3.35)
From the first inequality of Equation (3.26) and the following estimate, we have
![]()
then from the last inequality of Equation (3.35), we obtain
![]() (3.36)
(3.36)
From Equation (3.36), we have
![]() (3.37)
(3.37)
Due to![]() , integrating Equation (3.37) over
, integrating Equation (3.37) over![]() , we have
, we have
![]() (3.38)
(3.38)
From Equation (3.6), Equation (3.35) and Equation (3.38), we have
![]() (3.39)
(3.39)
Then using Equation (3.16), Equation (3.33) and![]() , we have
, we have
![]() (3.40)
(3.40)
Lemma 3.5 is proved. ![]()
Lemma 3.6. Suppose that ![]()
![]() (3.41)
(3.41)
![]() (3.42)
(3.42)
we have ![]() and
and![]() , where
, where ![]() is defined as in Lemma 3.5,
is defined as in Lemma 3.5,
![]() (3.43)
(3.43)
Proof. From ![]() is equivalent to
is equivalent to
![]() (3.44)
(3.44)
where ![]() and
and ![]() are defined as in Lemma 3.4. To find a sufficient condition of Equation (3.44), suppose that Equation (3.44) hold, so we have
are defined as in Lemma 3.4. To find a sufficient condition of Equation (3.44), suppose that Equation (3.44) hold, so we have
![]() (3.45)
(3.45)
To make![]() , if and only if it satisfies
, if and only if it satisfies
![]() (3.46)
(3.46)
![]() (3.47)
(3.47)
Equation (3.46) is equivalent to
![]() (3.48)
(3.48)
If Equation (3.48) is satisfied, so Equation (3.47) is equivalent to ![]() or is equivalent to
or is equivalent to
![]() (3.49)
(3.49)
Suppose that Equation (3.41) is equivalent to
![]() (3.50)
(3.50)
Hence,
![]() (3.51)
(3.51)
Hence,
![]() (3.52)
(3.52)
Therefore Equation (3.49) follows from Equation (3.52). From Equation (3.41) we conclude that![]() , Equation (3.48) follows from Equation (3.41), Equation (3.46) follows from Equation (3.48), Equation (3.46) follows from Equation (3.49), and from Equation (3.46) and Equation (3.47) we have
, Equation (3.48) follows from Equation (3.41), Equation (3.46) follows from Equation (3.48), Equation (3.46) follows from Equation (3.49), and from Equation (3.46) and Equation (3.47) we have![]() . The last we need to prove is
. The last we need to prove is![]() , from Lemma 3.5, we obtain
, from Lemma 3.5, we obtain
![]() (3.53)
(3.53)
we notice that![]() . Lemma 3.6 is proved.
. Lemma 3.6 is proved.
From Lemma 3.1 to Lemma 3.6,we can obtain the following conclusions.
Theorem 3.1. Suppose that ![]() is Lipschitz mapping space.
is Lipschitz mapping space. ![]()
![]() satisfy Equation (3.1) and Equation (3.2),
satisfy Equation (3.1) and Equation (3.2), ![]() and
and ![]() is the unique solution of Equation (3.3) and Equation (3.4) for
is the unique solution of Equation (3.3) and Equation (3.4) for![]() , respectively. Hence the transformation
, respectively. Hence the transformation ![]() is a contraction, and
is a contraction, and ![]() exists a unique fixed point
exists a unique fixed point![]() ,
, ![]() is inertial manifolds of the problem (2.1).
is inertial manifolds of the problem (2.1).
Theorem 3.2. Suppose that ![]() is the mapping of
is the mapping of![]() , for any
, for any![]() , there exists
, there exists ![]() such that, for
such that, for![]() ,
,
![]() (3.54)
(3.54)
where![]() ,
, ![]() is defined as in Lemma 2.3.
is defined as in Lemma 2.3.
Proof. Let ![]() with initial value
with initial value![]() , respectively, be two solutions of the problem (2.1). For any arbitrary
, respectively, be two solutions of the problem (2.1). For any arbitrary ![]() and for
and for![]() , and use the fact
, and use the fact ![]() there exists a constant
there exists a constant
![]() such that Equation (2.10) or Equation (2.11) is satisfied. From Equation (2.12), we have
such that Equation (2.10) or Equation (2.11) is satisfied. From Equation (2.12), we have
![]() (3.55)
(3.55)
Assume ![]() and for
and for![]() , therefore Equation (2.10) and Equation (2.11) can rewrite
, therefore Equation (2.10) and Equation (2.11) can rewrite
![]() (3.56)
(3.56)
![]() (3.57)
(3.57)
Let ![]() is absorbing set, the orbital solution
is absorbing set, the orbital solution ![]() satisfies
satisfies![]() . Let
. Let ![]() such that
such that
![]() (3.58)
(3.58)
Substituting ![]() and
and ![]() into Equation (3.56) and Equation (3.57), we have
into Equation (3.56) and Equation (3.57), we have
![]() (3.59)
(3.59)
If Equation (3.56) is satisfied, assume![]() , so we have the cone property
, so we have the cone property
![]() (3.60)
(3.60)
In a word, for![]() , whenever
, whenever ![]() By the properties of semigroups, for
By the properties of semigroups, for![]() , we have
, we have
![]() (3.61)
(3.61)
Theorem 3.2 is proved. ![]()
Supported
This work is supported by the National Natural Sciences Foundation of People’s Republic of China under Grant 11161057.
NOTES
*Corresponding author.