Global Existence of Periodic Solutions in a Nonlinear Delay-Coupling Chaos System ()
Received 29 January 2016; accepted 18 March 2016; published 21 March 2016

1. Introduction
In the 19th century, H. Poincaré found that three-body gravitational interactions can produce amazing complex behaviors by studying the celestial mechanics, that is, there may be uncertainty even in the dynamic equations of very simple object interactions. He found that some systems have sensitive dependence on initial values and behavioral unpredictability. It is the first discovery of chaos. In 1963, E.N. Lorenz [1] unexpectedly discovered the first chaotic attractor in simulating weather, since then, chaos occurs in many areas and has access to the far- reaching development.
Since the discovery of chaos, it has been highly regarded in many areas, such as mathematics, mechanics, meteorology, astronomy, and economics. Chaos can be used to achieve the encrypted transmission of infor- mation. If the information is hidden in the chaotic signal, when the receiver has synchronized with the trans- mitter signal, the signal can be obtained, rather than by other people. The important feature of chaos is its highly sensitive to initial values, which makes it difficult to control. In practical applications, we hope to eliminate the negative effects resulting chaos and strengthen its positive effects. This makes the chaos control has become a highly anticipated new field. In particular, we can control the bifurcation of system [2] , such as retarding the occurrence of inherent bifurcation, stabling bifurcation solution, changing the shape or type of bifurcation, and controlling multiplicity of the limit cycle, amplitude or frequency. It has formed a number of chaos control methods, such as the OGY method [3] , variational parameter control [4] , state feedback control [5] , adaptive control [6] , optimal control [7] , robust control [8] and non-feedback control [9] . As an important research aspect of chaos control, chaos synchronization has also been widely concerned, resulting in a variety of effective methods: PC synchronization [10] , active-passive synchronization [11] , chaos synchronization based on mutual coupling [12] and adaptive synchronization method [13] . Chaos control and chaos synchronization are identical. These methods often make the dimension of original system increases, forming a new coupled system. In order to understand the ultimate effect of chaos control and synchronization, we not only need to know the dynamic behavior of original system, but also need to discuss the one of new coupled system (see [14] - [18] ).
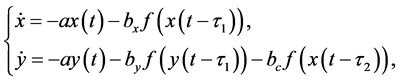
A system with unidirectional nonlinear delayed-coupling scheme is considered in this paper. T. Banerjee et al. [19] proposed system
 (1)
(1)
where x is the state variable,  are system parameters, and
are system parameters, and  is the time delay. f is the nonlinear function. When
is the time delay. f is the nonlinear function. When , [19] has reported that as b or
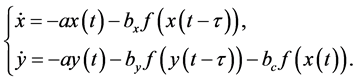
, [19] has reported that as b or  varies, chaos and hyperchaos are observed. Furthermore, [20] studied the synchronization of the following coupled system.
varies, chaos and hyperchaos are observed. Furthermore, [20] studied the synchronization of the following coupled system.
 (2)
(2)
where x and y are drive and response variables.  is the system delay, and
is the system delay, and  is the coupling delay.
is the coupling delay.  and
and  are as usual positive parameters. The value of
are as usual positive parameters. The value of  determines the strength of the coupling. Our purpose is to investigate the global existence of periodic solutions for the system.
determines the strength of the coupling. Our purpose is to investigate the global existence of periodic solutions for the system.
The remainder of this paper is organized as follows. In Section 2, we employ the preliminary results about the existence of the local Hopf bifurcation. In Section 3, the global Hopf bifurcation is established. An example is given in order to illustrate the results obtained in Section 4.
2. Preliminary Results
We present some preliminary results of system (2) about the existence of local periodic solutions. This is the basis of the global Hopf bifurcation.
Let , and denote
, and denote  as
as . Using x and y to represent the variables still, Equation (2) can be written into the following system
. Using x and y to represent the variables still, Equation (2) can be written into the following system
 (3)
(3)
Clearly, ![]() is an equilibrium point. The characteristic equation of its corresponding linear system around
is an equilibrium point. The characteristic equation of its corresponding linear system around ![]() is
is
![]() (4)
(4)
that is,
![]() (5)
(5)
or
![]() (6)
(6)
When![]() , the eigenvalues are
, the eigenvalues are![]() .
.
Let ![]() be a pair of roots of Equation (5). Substitute
be a pair of roots of Equation (5). Substitute ![]() into Equation (5) and separate the real and imaginary parts
into Equation (5) and separate the real and imaginary parts
![]() (7)
(7)
Denote (H1) ![]() and (H2)
and (H2)![]() . Let
. Let ![]() be a root of Equa- tion (4) near
be a root of Equa- tion (4) near ![]() satisfying
satisfying![]() .
.
Lemma 1. If (H1) or (H2) is satisfied, then
![]()
Lemma 2. 1) If (H1) and (H2) are not satisfied, then all roots of Equation (4) have negative real parts for any![]() .
.
2) If (H1) is satisfied, then there exists a sequence of ![]() satisfying
satisfying ![]() such that Equation (4) has a pair of purely imaginary roots
such that Equation (4) has a pair of purely imaginary roots ![]() when
when![]() , and all roots of Equation (4) have negative real parts when
, and all roots of Equation (4) have negative real parts when![]() .
.
3) If (H2) is satisfied, then there exists a sequence of ![]() satisfying
satisfying ![]() such that Equation (4) has a pair of purely imaginary roots
such that Equation (4) has a pair of purely imaginary roots ![]() when
when![]() , and all roots of Equation (4) have negative real parts when
, and all roots of Equation (4) have negative real parts when![]() .
.
4) If (H1) and (H2) are satisfied, then there exists a sequence of ![]() satisfying
satisfying ![]() and
and ![]() such that Equation (4) has two pairs of purely imaginary roots
such that Equation (4) has two pairs of purely imaginary roots ![]() when
when![]() , and all roots of Equation (4) have negative real parts when
, and all roots of Equation (4) have negative real parts when![]() , where
, where
![]()
and
![]()
Using the lemmas above, we have Theorem 1.
Theorem 1. Suppose (H1) is satisfied.
1) If (H1) and (H2) are not satisfied, then the zero equilibrium point of system (3) is asymptotically stable for any![]() .
.
2) If (H1) is satisfied, then the zero equilibrium point of system (3) is asymptotically stable when ![]() and unstable when
and unstable when![]() . System (3) undergoes a Hopf bifurcation at when
. System (3) undergoes a Hopf bifurcation at when![]() .
.
3) If (H2) is satisfied, then the zero equilibrium point of system (3) is asymptotically stable when ![]() and unstable when
and unstable when![]() . System (3) undergoes a Hopf bifurcation when
. System (3) undergoes a Hopf bifurcation when![]() .
.
4) If (H1) and (H2) are satisfied, then the zero equilibrium point of system (3) is asymptotically stable when
![]() and unstable when
and unstable when![]() . System (3) undergoes a Hopf
. System (3) undergoes a Hopf
bifurcation when![]() , where
, where ![]() are defined above.
are defined above.
3. Global Existence of Periodic Solutions
In this section, we study the global continuation of periodic solutions bifurcating from the point![]() ,
, ![]() ,
, ![]() ,
,![]() . Throughout this section, we follow closely the notations in Wu [21] and let (H1) or (H2) be satisfied, namely local Hopf bifurcation occurs. We define
. Throughout this section, we follow closely the notations in Wu [21] and let (H1) or (H2) be satisfied, namely local Hopf bifurcation occurs. We define
![]()
and let ![]() denote the connected component of
denote the connected component of ![]() in
in![]() , where
, where ![]() and
and
![]() are defined in Lemma 2.
are defined in Lemma 2.
We assume (H1) or (H2) is satisfied so that the local Hopf bifurcation occurs.
Lemma 3. If ![]() is bounded, then all periodic solutions of the system (3) are uniformly bounded.
is bounded, then all periodic solutions of the system (3) are uniformly bounded.
Proof. Suppose that there exists ![]() such that
such that![]() ,
, ![]() is a nonconstant peri- odic solution of system (3) and
is a nonconstant peri- odic solution of system (3) and ![]() have maximums at
have maximums at![]() , respectively, then
, respectively, then![]() . We have
. We have
![]()
![]()
This shows that the periodic solutions of (3) are uniformly bounded.
Lemma 4. System (3) has no nontrivial t-periodic solution.
Proof. If system (3) has a nontrivial t-periodic solution, then
![]() (8)
(8)
has a nontrivial periodic solution.
However, system (8) only has trivial periodic solutions. In fact,
![]()
only has a trivial periodic solution ![]() (i.e., equilibrium). Moreover,
(i.e., equilibrium). Moreover,
![]()
has no nontrivial periodic solution.
Thus, system (3) has no nontrivial t-periodic solution.
Next, we show system (3) has no nontrivial 2t-periodic solution.
Lemma 5. Assume
(H3) ![]()
is satisfied, system (3) has no nontrivial 4t-periodic solution. Moreover, system (3) has no nontrivial 2t-periodic solution.
Proof. Let ![]() be a 4t-periodic solution of system (3).
be a 4t-periodic solution of system (3).
![]()
Then ![]() is a periodic solution to the following system of ODE:
is a periodic solution to the following system of ODE:
![]() (9)
(9)
where ![]() and
and![]() ,
,![]() .
.
From Lemma 3, the periodic orbit of the system (9) belongs to the region:
![]() (10)
(10)
If we want to prove there is no nontrivial 4t-periodic solution in (3), it suffices to prove that there is no nonconstant periodic solution for (9). To do this, we apply the general Bendixson’s criterion in higher dimensions developed by Li & Muldowney [22] . It is easy to compute the Jacobian matrix ![]() of the system (9) for
of the system (9) for![]() :
:
![]()
Then the second additive compound matrix ![]() of
of ![]() is a
is a ![]() matrix defined as follows.
matrix defined as follows.
For any integers![]() , the element in the i-row and the j-column of
, the element in the i-row and the j-column of ![]() is
is
![]()
Choose a vector form in ![]() as
as
![]()
With respect to this norm, we can obtain that the ![]() measure
measure ![]() of the matrix
of the matrix ![]() is given by
is given by
![]() (11)
(11)
By Corollary 3.5 of Li & Muldowney [22] , the system (9) has no periodic orbit in G if![]() . By
. By
(11), we have ![]() if and only if
if and only if
![]() (12)
(12)
So we get (9) only has trivial periodic solutions when (H2) is satisfied.
Thus, (9) has no nontrivial periodic solution. System (3) has no 4t-periodic solution.
Theorem 2. Suppose that (H1)/(H2) and (H3) are satisfied, then, for each![]() , system (3) has
, system (3) has ![]()
nonconstant periodic solutions with periods in![]() , respectively. Here,
, respectively. Here,
![]() are defined in Lemma 2.
are defined in Lemma 2.
Proof. We can prove that the projection of ![]() onto t-space includes
onto t-space includes![]() ,
,![]() . We have given the characteristic matrix of the system (3) at zero equilibrium.
. We have given the characteristic matrix of the system (3) at zero equilibrium.
By Lemmas 1 and 2, there exist![]() ,
, ![]() and a smooth curve
and a smooth curve ![]() such that
such that ![]() and
and
![]()
Then![]() .
.
Denote ![]() and
and
![]()
Obviously, if ![]() and
and ![]() such that
such that![]() , then
, then![]() ,
, ![]() ,
,![]() . Set
. Set
![]()
We obtain the crossing number
![]()
We conclude that
![]()
By Theorem 3.3 of Wu [21] , ![]() is unbounded.
is unbounded.
Lemma 3 implies that the projection of ![]() onto the z-space is bounded.
onto the z-space is bounded.
From the definition of![]() , we know that
, we know that
![]()
Hence
![]()
From Lemmas 4 and 5, we know that ![]() if
if![]() , and
, and![]() if
if![]() . So, to make
. So, to make ![]() unbo- unded, the projection of
unbo- unded, the projection of ![]() onto t-space must be unbounded. Obviously,
onto t-space must be unbounded. Obviously, ![]() are pairwise disjoint. So system (3) has
are pairwise disjoint. So system (3) has ![]() nonconstant periodic solutions for
nonconstant periodic solutions for![]() .
.
In this section, we derive the global existences, number and periods of periodic solutions. However, the stability of periodic solutions far away from ![]() is unclear.
is unclear.
4. An Example
Choosing ![]() and
and ![]() with
with ![]() , system (2) can be expressed as follows:
, system (2) can be expressed as follows:
![]() (13)
(13)
[19] gave the curves of ![]() corresponding to different parameters
corresponding to different parameters ![]() and l (see Figure 1). It evidences
and l (see Figure 1). It evidences ![]() is bounded when
is bounded when ![]() (A is any finite constant).
(A is any finite constant).
For system (13), ![]() ,
, ![]() and
and![]() . (H1) is satisfied and (H2) isn’t. Furthermore,
. (H1) is satisfied and (H2) isn’t. Furthermore,![]() .
.
System (13) has a periodic solution near![]() . As shown in Figure 2 at
. As shown in Figure 2 at![]() .
.
(H3) is correct, and we now show large amplitude periodic solutions exist for values of ![]() far away from
far away from![]() . This indicates the global existence of periodic solutions. As shown in Figure 3 at
. This indicates the global existence of periodic solutions. As shown in Figure 3 at![]() .
.
![]()
Figure 2. Numerical simulations of a periodic solution to system (13) when ![]() is near
is near![]() .
.
![]()
Figure 3. Numerical simulations of a periodic solution to system (13) when ![]() is far away from
is far away from![]() .
.
5. Conclusion
In our paper, the effect of parameters on dynamics of a unidirectional nonlinear delayed-coupling chaos system at the zero fixed point is investigated. There exist the critical values of Hopf bifurcation ![]() and small amplitude periodic solutions. Furthermore, we derive that the local periodic solutions also exist globally for
and small amplitude periodic solutions. Furthermore, we derive that the local periodic solutions also exist globally for![]() . In addition, the results indicate the variation of dynamics of system (2) is owing to the inherent delay, and not owing to the coupled one. Our results are propitious to investigate chaos synchronization using system (2), especially synchronization of periodic solutions. However, it still needs to study further for the dynamics of bidirectional coupled system.
. In addition, the results indicate the variation of dynamics of system (2) is owing to the inherent delay, and not owing to the coupled one. Our results are propitious to investigate chaos synchronization using system (2), especially synchronization of periodic solutions. However, it still needs to study further for the dynamics of bidirectional coupled system.
Acknowledgements
We thank the Editor and the referee for their comments. The research is supported by National Natural Science Foundation of China (No. 11301263), the Jiangsu Natural Science Foundation (No. BK20140927), the Ningxia Natural Science Foundation (No. NZ13213) and the Ningxia Higher Educational Science Program (No. GX2014[222]17).