Model Helicopter Control Using Body-Mounted Vibro-Tactile Transducers ()
1. Introduction
Highly maneuverable flying machines such as helicopters are widely used in search and rescue, and surveillance due to their agility [1] . Control of these machines lends itself as a challenging Multi-Input Multi-Output (MIMO) problem due to the nonlinear dynamics and strong interaction between controlled variables. Incorporating haptic sensors into the closed-loop feedback control of flying machines has recently drawn a great deal of attention in both academia and the industry sector [2] . When employing body-referenced haptic sensors, the man-machine interaction can be as acute as that when using sense of sight and/or sound. In [3] , a haptic interface for UAV collision avoidance was used. It was reported that, with the limited visual information, the collision could be avoided using haptic clues. Literature pertinent to the control of highly maneuverable aircrafts is vast. In particular, the robust and optimal controls of helicopters have been studied for the past two decades, (e.g., Refs. [1] [4] ).
An effective human-in-the-loop hybrid control strategy based on sensory information obtained via an array of body-mounted haptic sensors (i.e., vibrating motors) is proposed. This method was successfully tested on a 2- dof model helicopter. The control strategy is summarized below.
At the first stage, a user attempts to navigate the model helicopter to an attraction zone through haptic sensory feedback by using a joystick. In the second stage, an autonomous nonlinear controller takes over making the helicopter hover at steady state with high precision. A simple switching algorithm is adopted for smooth transi- tion between the human- and computer-based controls.
The experimental model helicopter used in this study has two degrees of freedom, namely pitch and yaw (see Figure 1). The pitch propeller is driven by a voltage-controlled DC motor. Nose up is considered as positive pitch. Correspondingly, the yaw propeller is driven by a smaller voltage-controlled DC motor. Due to the gy- roscopic effect, the propeller causing pitch would also cause a load torque on the motor’s shaft which is in turn seen at the yaw axis. The model helicopter is pivoted on a fixed stand. Its center of gravity is located off the pi- vot point with a considerable offset in a way that the gravitation force will push the helicopter’s nose down all the time. Pitch and yaw angles are measured through optical encoders. The pitch angle is limited to ±40 degrees from the level configuration, while, thanks to the slip-ring employed at the pivot point, the yaw angle can vary, and being measured by an optical encoder, indefinitely.
The layout of the paper is as follows: The governing dynamics equations of the system are described in Sec- tion 2. The control strategy is explained in Section 3. The experimental setup and results are given in Sections 4 and 5, respectively. Section 6 concludes the paper and described the future works.
2. Dynamics Model of the Helicopter
Figure 1 shows a schematic of the main components of the model helicopter. The governing dynamics equa- tions are as follows [5] :
 (1)
(1)
 (2)
(2)
Definition of parameters in Equations (1) and (2) are given in Table 1.
The nonlinear governing dynamics given in Equations (1) and (2) can be linearized about the quiescent point
defined at ,
,  , and
, and 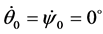 as follows:
as follows:
![]()
Figure 1. A schematic of the 2-dof model helicopter.
![]()
Table 1. Physical parameters of the system.
 (3)
(3)
 (4)
(4)
The linearized dynamics equations can be presented in the state space, disregarding the gravitational torque
term, namely  as follows:
as follows:
 (5)
(5)
where the state and control vectors are:  and
and  respectively.
respectively.
As can be seen from Equation (1), the gravitational force generates a torque around the pivot point as
 . In order to compensate this torque, a non-linear term,
. In order to compensate this torque, a non-linear term,  was fed-forward to the voltage
was fed-forward to the voltage
provided to the pitch DC motor as follows:
 (6)
(6)
where ![]() is:
is:
![]() (7)
(7)
In Equation (7), ![]() denotes the feed-forward control gain (normally considered as 1) and
denotes the feed-forward control gain (normally considered as 1) and ![]() denotes the desired pitch angle. The gravitational force would have no effect on yaw motion. Therefore, the overall
denotes the desired pitch angle. The gravitational force would have no effect on yaw motion. Therefore, the overall
pitch/yaw control input denoted by ![]() can be presented as:
can be presented as:
![]() (8)
(8)
3. The Proposed Control Strategy
The control strategy is carried out in two phases. In the first phase, a human operator attempts to bring the robot within an attraction zone using a joystick via haptic sensory information. We call this a human-in-the-loop con- trol strategy. In the second phase, a nonlinear controller takes over for the precise end-of-motion servoing pur- pose. A simple switching law is adopted for smooth transition between the two controllers. The control strate- gies and the switching law are described in the following sections.
3.1. Human-in-the-loop Control
The key to the successful integration of vibro-tactile sensory information into a control loop is to convey an or- ganized tactile sensation to the user via lightweight and compact devices mounted on user’s body without im- pairing his/her movement. In this context, an array of four small-size vibrating DC motors (denoted as front, back, left and right motors) was mounted on the user’s body (see Figure 2). The voltage provided to the qua- druplet vibro-motors, and correspondingly their vibration amplitudes, will change proportional to the error and also rate of change of error between the pitch and yaw angles and their desired values. Mathematically this can be written as:
![]() (9)
(9)
where ![]() and
and ![]() denote the voltages provided to the two pairs (i.e., front-back and left-right) of the body- mounted vibro-motors corresponding to pitch and yaw errors, respectively, the
denote the voltages provided to the two pairs (i.e., front-back and left-right) of the body- mounted vibro-motors corresponding to pitch and yaw errors, respectively, the ![]() denotes the calibration constant, the
denotes the calibration constant, the ![]() denotes the Linear Quadratic Regulator (LQR) gain, and
denotes the Linear Quadratic Regulator (LQR) gain, and ![]() denotes the desired state of the helicopter. The arrangement of the voltages provided to the quadruplet vibro motors are as follows:
denotes the desired state of the helicopter. The arrangement of the voltages provided to the quadruplet vibro motors are as follows:
![]() (10)
(10)
In Equation (10), ![]() ,
, ![]() ,
, ![]() , and
, and ![]() denote the voltages provided to the front, back, right and left motors mounted on operator’s body as seen in Figure 2. In the next section, a description on calculating the
denote the voltages provided to the front, back, right and left motors mounted on operator’s body as seen in Figure 2. In the next section, a description on calculating the ![]() is given.
is given.
3.1.1. The Linear Quadratic Regulator, an overview
In a Linear Quadratic Regulator (LQR), the control gain, ![]() in a linear full-state feedback control law of the form
in a linear full-state feedback control law of the form ![]() is calculated by minimizing a quadratic objective function,
is calculated by minimizing a quadratic objective function, ![]() defined as:
defined as:
![]() (11)
(11)
where ![]() and
and ![]() are weighting matrices on states and the control variables, respectively. The following weight- ing matrices were adopted in our experiments:
are weighting matrices on states and the control variables, respectively. The following weight- ing matrices were adopted in our experiments:
![]()
Figure 2. Four vibro-tactile sensors mounted on human’s body.
![]() (12)
(12)
The LQR control gain matrix, ![]() was calculated as:
was calculated as:
![]() (13)
(13)
3.1.2. The Switching Law
The user controls the motion of the model helicopter based on vibro-tactile sensation he/she receives through four body-mounted motors. A human-based control would shift to an autonomous control strategy after helicop- ter is brought to a safe zone (i.e., attraction zone). A weighted 2-norm of the state error as a performance index, ![]() was used to trigger the switching between the human- and computer-based controllers. Mathematically it can be represented as:
was used to trigger the switching between the human- and computer-based controllers. Mathematically it can be represented as:
![]() , (14)
, (14)
where ![]() denotes the weighting factors,
denotes the weighting factors, ![]() denote the states, and
denote the states, and ![]() denotes the desired value of states.
denotes the desired value of states.
Weighting factors, ![]() and the calibration constant,
and the calibration constant, ![]() were tuned offline during operator’s training based on his/her level of comfort when controlling the model helicopter. The overall structure of the proposed control strategy is depicted in Figure 3.
were tuned offline during operator’s training based on his/her level of comfort when controlling the model helicopter. The overall structure of the proposed control strategy is depicted in Figure 3.
3.2. End-of-motion Servo Control
A full-state feedback control law similar to that in LQR was developed for the end-of-motion servoing. However, a loop-shaping optimization process was utilized to calculate the controller gains. The nonlinear model of the helicopter was assumed within the optimization process. Furthermore, the pitch/yaw motor saturation was taken into consideration through the optimization process as well. Geometric hard constrains on parameters such as settling time, rise time and the overshoot in system’s response were defined offline prior to optimization. The Response Optimization Toolbox from Math Work was used for this purpose [6] . As an example, Figure 4 shows the simulated yaw response of the model helicopter when using the LQR design described in Section (3.1.1). Figure 5 shows the system’s response based on the response optimization technique described earlier. As can be seen from Figure 5, a lesser overshoot, settling time, and rise time were achieved without saturating the yaw motor. Figure 6 shows the geometric constrains imposed on the system’s response along with a number of ite- rations on calculated response trajectories. It is noteworthy that two integral terms on pitch and yaw angles were also added to the state vector further on to reduce the steady state error. The modified state vector ![]() was:
was:
![]() (15)
(15)
The optimal gain ![]() was calculated as:
was calculated as:
![]() (16)
(16)
4. Experimental setup
Figure 7 shows the experimental apparatus. Two power modules were used to drive pitch and yaw motors of the model helicopter. Linear Pulse Width Modulated (PWM) servo amplifiers were also used to drive body-mounted vibrating motors. The motion of the helicopter can be controlled in real time via a Logitech joystick (shown in the figure) or completely autonomously. The Q8 board from Quanser was used for control and data acquisition in real time [7] . Wincon from Quanser along with a third-party real-time kernel provide a real-time operating environment within the Simulink. The Q8 board can support 8 analogue outputs and 8 quadratic encoder chan-
![]()
Figure 3. The proposed control structure.
![]()
Figure 4. Simulated yaw response of the 2-dof model helicopter via LQR + Integrator.
![]()
Figure 5. Simulated yaw response of the 2-dof model helicopter via loop- shaping and response optimization.
![]()
Figure 6. User-defined geometric hard constraints on the 2-dof model heli- copter’s yaw response.
nels. Two rotary optical encoders measure the pitch and yaw angles in real time. Pitch motion is limited to ![]() degrees from the level configuration. However, the yaw angle can change indefinitely thanks to the slip-ring mechanism used at the pivot point connecting the stand and the helicopter’s main body. The pitch motor can generate a larger thrust than that in the yaw motor. This extra power would be needed to compensate for the gravitational torque around the pivot due to the offset between the helicopter’s center of gravity and the hinge on the helicopter’s stand.
degrees from the level configuration. However, the yaw angle can change indefinitely thanks to the slip-ring mechanism used at the pivot point connecting the stand and the helicopter’s main body. The pitch motor can generate a larger thrust than that in the yaw motor. This extra power would be needed to compensate for the gravitational torque around the pivot due to the offset between the helicopter’s center of gravity and the hinge on the helicopter’s stand.
5. Experimental Result
Figure 8 and Figure 9 show two representative experimental results. The desired pitch and yaw angles were set at 0 and 90 degrees, respectively in both experiments. Pitch and yaw angles along with voltages provided to the pitch/yaw motors are shown in figures. The initial elapsed time for controllers to take effect in both experiments was set at 3 seconds approximately. In the first experiment shown in Figure 8, the human-in-the-loop control strategy is in place for 15 seconds following the initialization. The computer-based controller starts at 18 se- conds introducing some small overshoots in both pitch and yaw motions before bringing the helicopter to steady state.
![]()
Figure 8. Experimental results #1 (original in color).
![]()
Figure 9. Experimental result after changing parameters (original in color).
In the second experimentation, the calibration constant, ![]() , and also the switching threshold,
, and also the switching threshold, ![]() were
were
changed based on operator’s learning and comfort level. A lesser overshoot was achieved but at the cost of an increased settling time. It is noteworthy that the sensitivity of the joystick was also decreased in the second ex- perimentation. In both experiments the operator could guide the model helicopter to a safe zone blindfolded. In both figures, the dashed line represents the time at which the computer-based controller takes effect.
6. Conclusions and Future Work
A methodology to incorporate tactile sensory information into the feedback control loop of a 2-dof model heli- copter was addressed. It was shown through some experiments that body-referenced touch sensors can provide the human operator with sufficient information to guide a free-flying object even in the case that visual clues are obstructed. A blindfolded operator, after going through a training period, could navigate the model helicopter to a safe zone. The overall control strategy was divided into two main stages, namely the human-in-the-loop and the computer-based control. An LQR-based control strategy would suffice to generate proper control cues to the operator, subjected to a cluster of vibro-tactile motors mounted on his/her body. A computer-based control takes effect at the end of motion for precise homing.
Further characterization of the human learning curve for the more robust and smooth control of our model helicopter is under investigation. Incorporating visual clues when controlling the model helicopter in awkward maneuvers such as those found in stunt flying in form of a sensor fusion technique will be also investigated. In- corporating collision avoidance strategies into the control loop through tactile sensory information on a free fly- ing UAV is envisioned in a long term.