 Journal of Global Positioning Systems (2002) Vol. 1, No. 1: 48-56 Pseudolite Applications in Positioning and Navigation: Progress and Problems J. Wang School of Surveying and Spatial Information Systems, University of New South Wales, Sydney, NSW 2052, Australia e-mail: jinling.wang@unsw.edu.au; Tel: +61(2)9385 4203; Fax: +61(2)9313 7493 Received: 4 May 2002 / Accepted: 18 July 2002 Abstract. Global navigation satellite systems have been revolutionising surveying, geodesy, navigation and other position/location sensitive disciplines. However, there are two intrinsic shortcomings in such satellite-based positioning systems: signal attenuation and dependence on the geometric distribution of the satellites. Consequently, the system performance can decrease significantly under some harsh observing conditions. To tackle this problem, some new concepts of positioning with the use of pseudo-satellites have been developed and tested. Pseudo-satellites, also called pseudolites, are ground-based transmitters that can be easily installed wherever they are needed. They therefore offer great flexibility in positioning and navigation applications. Although some initial experimental results are encouraging, there are still some challenging issues that need to be addressed. This paper reviews the historical pseudolite hardware developments and recent progress in pseudolite-based positioning, and discusses the current technical issues. Key words: GPS, Pseudolites, Indoor Positioning, Navigation 1 Introduction Global navigation satellite systems, such as GPS and Glonass, have been playing an increasingly important role in surveying, geodesy and navigation, in which positioning is a major component. It is well known that for such space-borne satellite positioning systems the accuracy, availability and reliability of the positioning results is very dependent on both the number and geometric distribution of satellites being tracked. However, under some harsh observing environments, such as in urban canyons and deep open-cut mines, the number and geometry of visible satellites may not be sufficient to reliably carry out the positioning operations. In the worst situations, such as underground or inside buildings, the satellite signals are completely lost. Such problems with space-borne satellite positioning systems can be addressed by additional ranging signals transmitted from ground-based "pseudo-satellites" (pseudolites). The concept of the pseudolite was proposed in the 1970’s, even before the launch of the GPS satellites. In fact, pseudolites were originally designed to test the initial GPS user equipment (Harrington & Dolloff, 1976). During the past decade, new pseudolite concepts and hardware have been developed for a variety of positioning and navigation applications. Pseudolites can be used as an augmentation tool for space-borne satellite positioning systems. This augmentation can improve the system performance because the availability and geometry of positioning solutions are significantly strengthened. Further more, a pseudolite-only positioning system is possible, which can replace the space-borne satellite constellation where the use of satellite signals is not feasible, such as underground and indoors. This paper presents an overview of the pseudolite hardware developments and recent progress in pseudolite positioning applications, and discusses the current challenging issues, such as pseudolite and receiver hardware development, pseudolite synchronization, multipath effects and modelling errors. 2 Hardware Developments During the early days of GPS development, the test facility, the Inverted Range, was established. In this test range at Yuma Proving Ground (USA) four ground transmitters provided the simulated GPS satellite signals 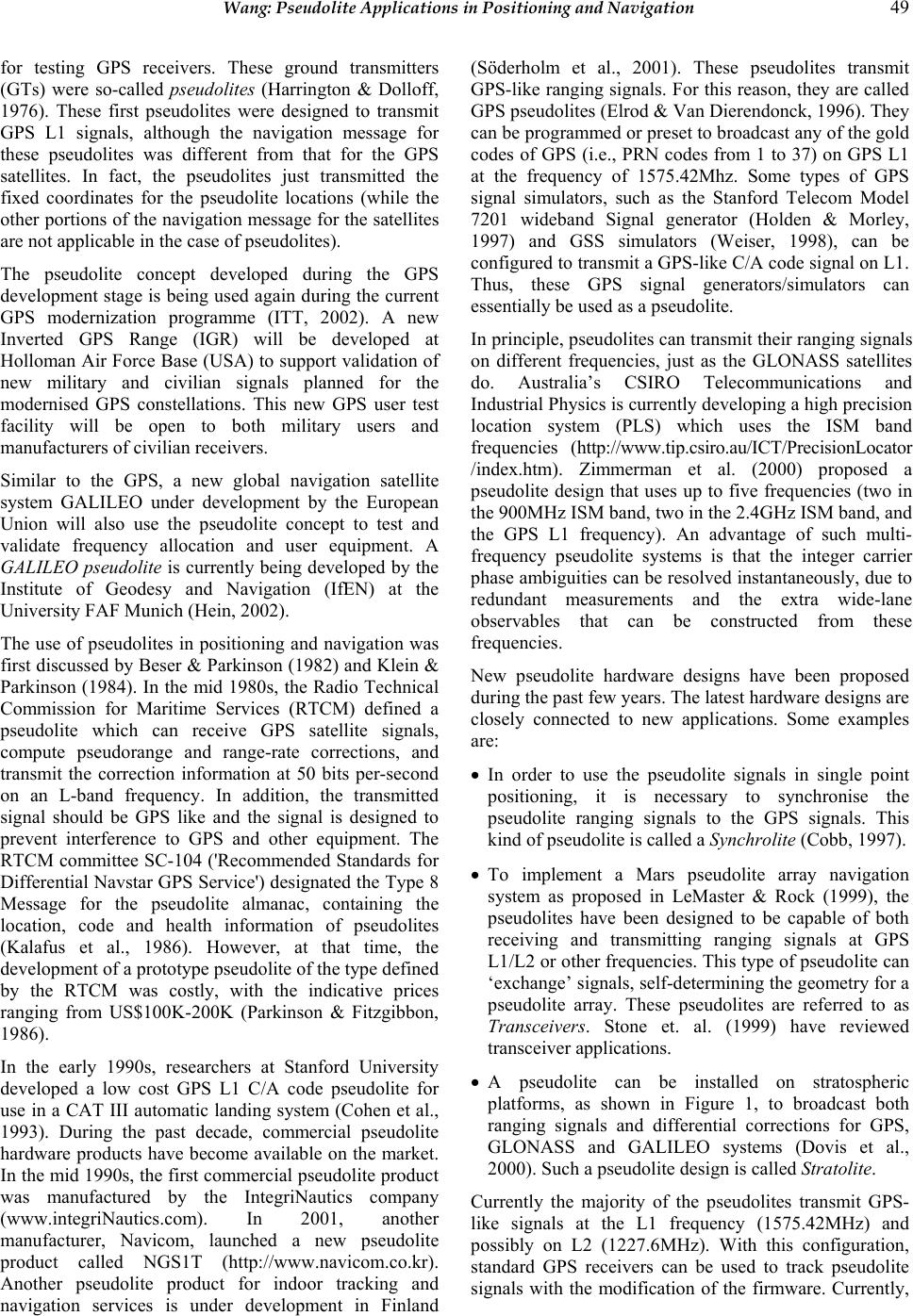 Wang: Pseudolite Applications in Positioning and Navigation 49 for testing GPS receivers. These ground transmitters (GTs) were so-called pseudolites (Harrington & Dolloff, 1976). These first pseudolites were designed to transmit GPS L1 signals, although the navigation message for these pseudolites was different from that for the GPS satellites. In fact, the pseudolites just transmitted the fixed coordinates for the pseudolite locations (while the other portions of the navigation message for the satellites are not applicable in the case of pseudolites). The pseudolite concept developed during the GPS development stage is being used again during the current GPS modernization programme (ITT, 2002). A new Inverted GPS Range (IGR) will be developed at Holloman Air Force Base (USA) to support validation of new military and civilian signals planned for the modernised GPS constellations. This new GPS user test facility will be open to both military users and manufacturers of civilian receivers. Similar to the GPS, a new global navigation satellite system GALILEO under development by the European Union will also use the pseudolite concept to test and validate frequency allocation and user equipment. A GALILEO pseudolite is currently being developed by the Institute of Geodesy and Navigation (IfEN) at the University FAF Munich (Hein, 2002). The use of pseudolites in positioning and navigation was first discussed by Beser & Parkinson (1982) and Klein & Parkinson (1984). In the mid 1980s, the Radio Technical Commission for Maritime Services (RTCM) defined a pseudolite which can receive GPS satellite signals, compute pseudorange and range-rate corrections, and transmit the correction information at 50 bits per-second on an L-band frequency. In addition, the transmitted signal should be GPS like and the signal is designed to prevent interference to GPS and other equipment. The RTCM committee SC-104 ('Recommended Standards for Differential Navstar GPS Service') designated the Type 8 Message for the pseudolite almanac, containing the location, code and health information of pseudolites (Kalafus et al., 1986). However, at that time, the development of a prototype pseudolite of the type defined by the RTCM was costly, with the indicative prices ranging from US$100K-200K (Parkinson & Fitzgibbon, 1986). In the early 1990s, researchers at Stanford University developed a low cost GPS L1 C/A code pseudolite for use in a CAT III automatic landing system (Cohen et al., 1993). During the past decade, commercial pseudolite hardware products have become available on the market. In the mid 1990s, the first commercial pseudolite product was manufactured by the IntegriNautics company (www.integriNautics.com). In 2001, another manufacturer, Navicom, launched a new pseudolite product called NGS1T (http://www.navicom.co.kr). Another pseudolite product for indoor tracking and navigation services is under development in Finland (Söderholm et al., 2001). These pseudolites transmit GPS-like ranging signals. For this reason, they are called GPS pseudolites (Elrod & Van Dierendonck, 1996). They can be programmed or preset to broadcast any of the gold codes of GPS (i.e., PRN codes from 1 to 37) on GPS L1 at the frequency of 1575.42Mhz. Some types of GPS signal simulators, such as the Stanford Telecom Model 7201 wideband Signal generator (Holden & Morley, 1997) and GSS simulators (Weiser, 1998), can be configured to transmit a GPS-like C/A code signal on L1. Thus, these GPS signal generators/simulators can essentially be used as a pseudolite. In principle, pseudolites can transmit their ranging signals on different frequencies, just as the GLONASS satellites do. Australia’s CSIRO Telecommunications and Industrial Physics is currently developing a high precision location system (PLS) which uses the ISM band frequencies (http://www.tip.csiro.au/ICT/PrecisionLocator /index.htm). Zimmerman et al. (2000) proposed a pseudolite design that uses up to five frequencies (two in the 900MHz ISM band, two in the 2.4GHz ISM band, and the GPS L1 frequency). An advantage of such multi- frequency pseudolite systems is that the integer carrier phase ambiguities can be resolved instantaneously, due to redundant measurements and the extra wide-lane observables that can be constructed from these frequencies. New pseudolite hardware designs have been proposed during the past few years. The latest hardware designs are closely connected to new applications. Some examples are: • In order to use the pseudolite signals in single point positioning, it is necessary to synchronise the pseudolite ranging signals to the GPS signals. This kind of pseudolite is called a Synchrolite (Cobb, 1997). • To implement a Mars pseudolite array navigation system as proposed in LeMaster & Rock (1999), the pseudolites have been designed to be capable of both receiving and transmitting ranging signals at GPS L1/L2 or other frequencies. This type of pseudolite can ‘exchange’ signals, self-determining the geometry for a pseudolite array. These pseudolites are referred to as Transceivers. Stone et. al. (1999) have reviewed transceiver applications. • A pseudolite can be installed on stratospheric platforms, as shown in Figure 1, to broadcast both ranging signals and differential corrections for GPS, GLONASS and GALILEO systems (Dovis et al., 2000). Such a pseudolite design is called Stratolite. Currently the majority of the pseudolites transmit GPS- like signals at the L1 frequency (1575.42MHz) and possibly on L2 (1227.6MHz). With this configuration, standard GPS receivers can be used to track pseudolite signals with the modification of the firmware. Currently, 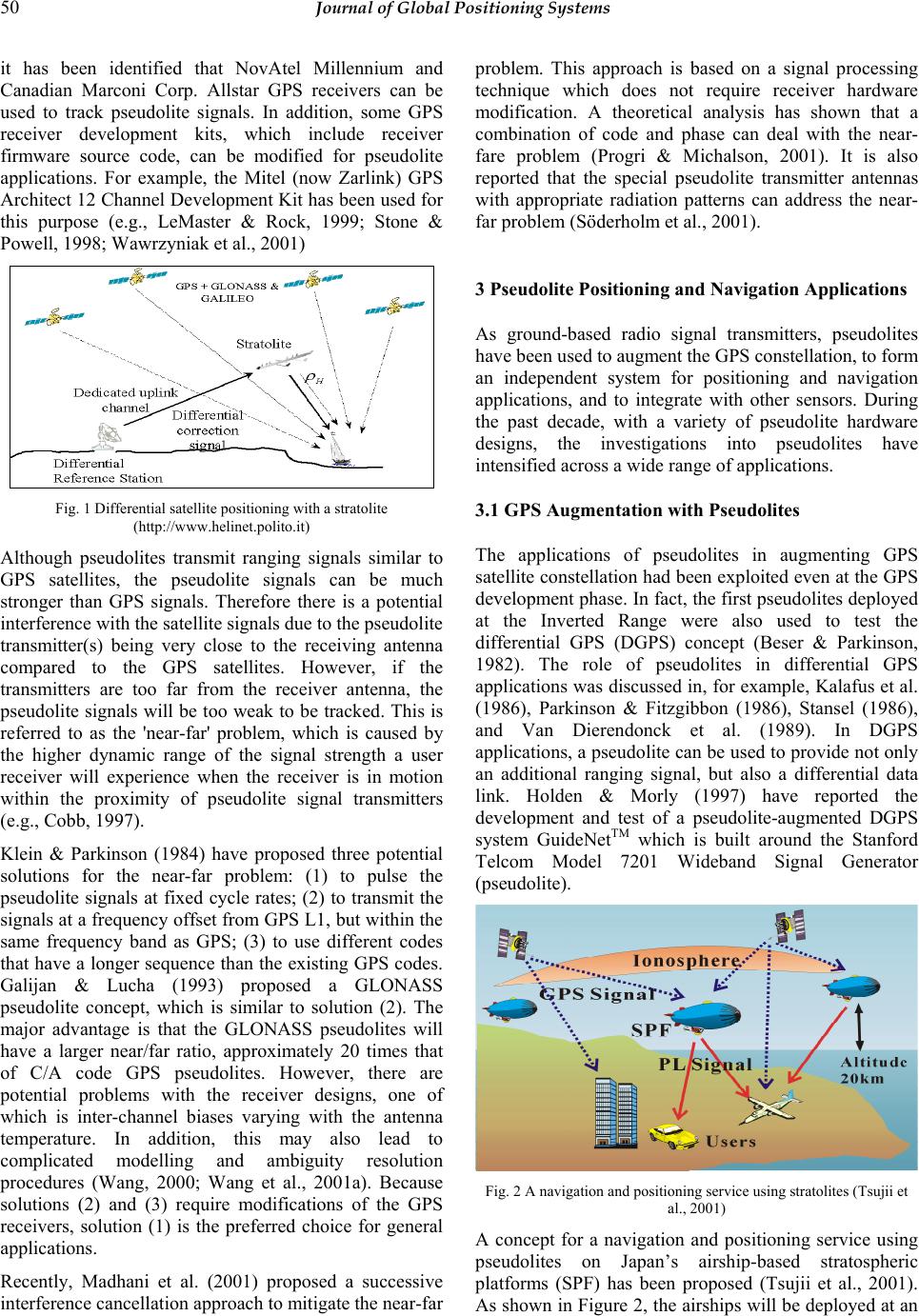 50 Journal of Global Positioning Systems it has been identified that NovAtel Millennium and Canadian Marconi Corp. Allstar GPS receivers can be used to track pseudolite signals. In addition, some GPS receiver development kits, which include receiver firmware source code, can be modified for pseudolite applications. For example, the Mitel (now Zarlink) GPS Architect 12 Channel Development Kit has been used for this purpose (e.g., LeMaster & Rock, 1999; Stone & Powell, 1998; Wawrzyniak et al., 2001) Fig. 1 Differential satellite positioning with a stratolite (http://www.helinet.polito.it) Although pseudolites transmit ranging signals similar to GPS satellites, the pseudolite signals can be much stronger than GPS signals. Therefore there is a potential interference with the satellite signals due to the pseudolite transmitter(s) being very close to the receiving antenna compared to the GPS satellites. However, if the transmitters are too far from the receiver antenna, the pseudolite signals will be too weak to be tracked. This is referred to as the 'near-far' problem, which is caused by the higher dynamic range of the signal strength a user receiver will experience when the receiver is in motion within the proximity of pseudolite signal transmitters (e.g., Cobb, 1997). Klein & Parkinson (1984) have proposed three potential solutions for the near-far problem: (1) to pulse the pseudolite signals at fixed cycle rates; (2) to transmit the signals at a frequency offset from GPS L1, but within the same frequency band as GPS; (3) to use different codes that have a longer sequence than the existing GPS codes. Galijan & Lucha (1993) proposed a GLONASS pseudolite concept, which is similar to solution (2). The major advantage is that the GLONASS pseudolites will have a larger near/far ratio, approximately 20 times that of C/A code GPS pseudolites. However, there are potential problems with the receiver designs, one of which is inter-channel biases varying with the antenna temperature. In addition, this may also lead to complicated modelling and ambiguity resolution procedures (Wang, 2000; Wang et al., 2001a). Because solutions (2) and (3) require modifications of the GPS receivers, solution (1) is the preferred choice for general applications. Recently, Madhani et al. (2001) proposed a successive interference cancellation approach to mitigate the near-far problem. This approach is based on a signal processing technique which does not require receiver hardware modification. A theoretical analysis has shown that a combination of code and phase can deal with the near- fare problem (Progri & Michalson, 2001). It is also reported that the special pseudolite transmitter antennas with appropriate radiation patterns can address the near- far problem (Söderholm et al., 2001). 3 Pseudolite Positioning and Navigation Applications As ground-based radio signal transmitters, pseudolites have been used to augment the GPS constellation, to form an independent system for positioning and navigation applications, and to integrate with other sensors. During the past decade, with a variety of pseudolite hardware designs, the investigations into pseudolites have intensified across a wide range of applications. 3.1 GPS Augmentation with Pseudolites The applications of pseudolites in augmenting GPS satellite constellation had been exploited even at the GPS development phase. In fact, the first pseudolites deployed at the Inverted Range were also used to test the differential GPS (DGPS) concept (Beser & Parkinson, 1982). The role of pseudolites in differential GPS applications was discussed in, for example, Kalafus et al. (1986), Parkinson & Fitzgibbon (1986), Stansel (1986), and Van Dierendonck et al. (1989). In DGPS applications, a pseudolite can be used to provide not only an additional ranging signal, but also a differential data link. Holden & Morly (1997) have reported the development and test of a pseudolite-augmented DGPS system GuideNetTM which is built around the Stanford Telcom Model 7201 Wideband Signal Generator (pseudolite). Fig. 2 A navigation and positioning service using stratolites (Tsujii et al., 2001) A concept for a navigation and positioning service using pseudolites on Japan’s airship-based stratospheric platforms (SPF) has been proposed (Tsujii et al., 2001). As shown in Figure 2, the airships will be deployed at an 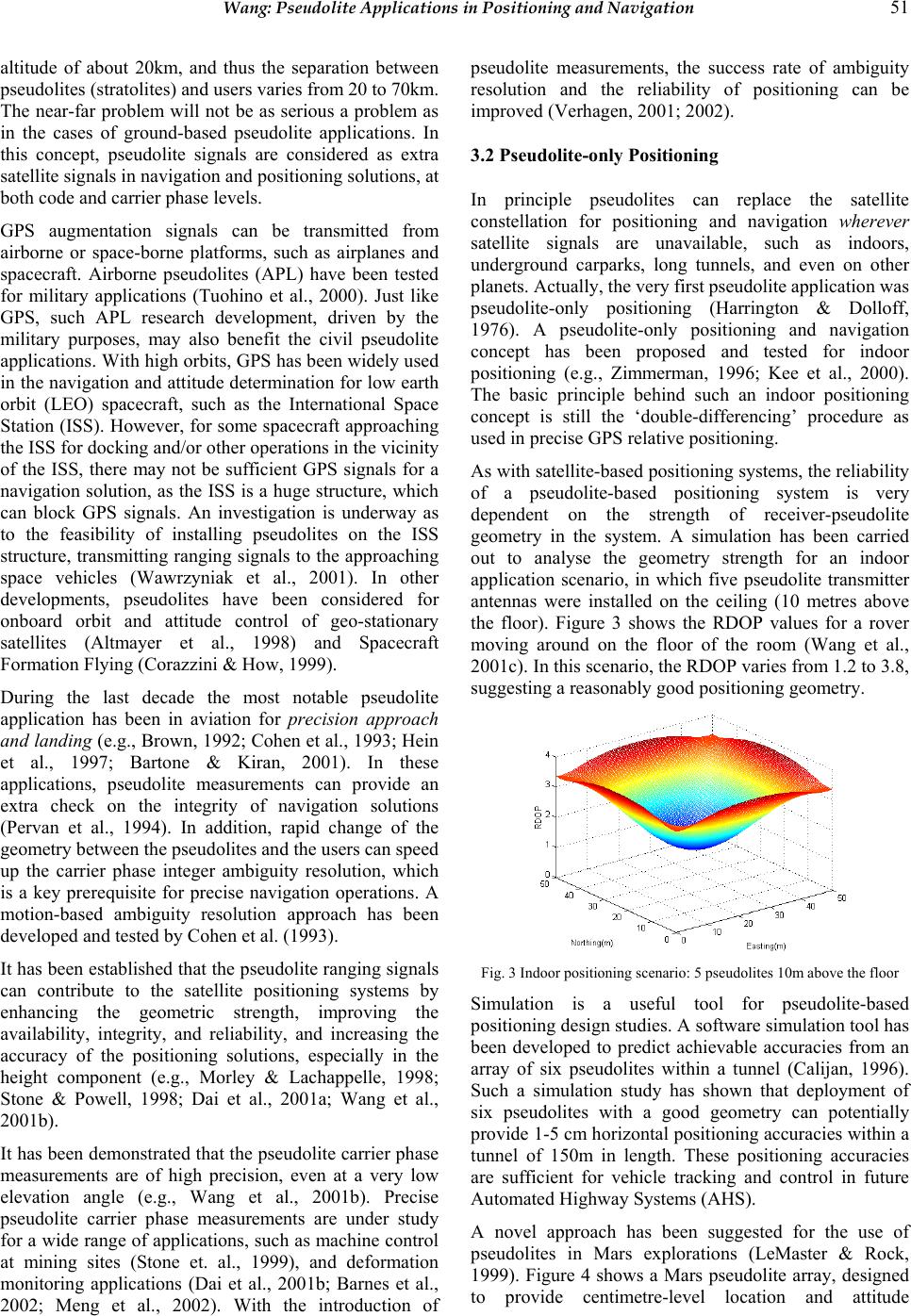 Wang: Pseudolite Applications in Positioning and Navigation 51 altitude of about 20km, and thus the separation between pseudolites (stratolites) and users varies from 20 to 70km. The near-far problem will not be as serious a problem as in the cases of ground-based pseudolite applications. In this concept, pseudolite signals are considered as extra satellite signals in navigation and positioning solutions, at both code and carrier phase levels. GPS augmentation signals can be transmitted from airborne or space-borne platforms, such as airplanes and spacecraft. Airborne pseudolites (APL) have been tested for military applications (Tuohino et al., 2000). Just like GPS, such APL research development, driven by the military purposes, may also benefit the civil pseudolite applications. With high orbits, GPS has been widely used in the navigation and attitude determination for low earth orbit (LEO) spacecraft, such as the International Space Station (ISS). However, for some spacecraft approaching the ISS for docking and/or other operations in the vicinity of the ISS, there may not be sufficient GPS signals for a navigation solution, as the ISS is a huge structure, which can block GPS signals. An investigation is underway as to the feasibility of installing pseudolites on the ISS structure, transmitting ranging signals to the approaching space vehicles (Wawrzyniak et al., 2001). In other developments, pseudolites have been considered for onboard orbit and attitude control of geo-stationary satellites (Altmayer et al., 1998) and Spacecraft Formation Flying (Corazzini & How, 1999). During the last decade the most notable pseudolite application has been in aviation for precision approach and landing (e.g., Brown, 1992; Cohen et al., 1993; Hein et al., 1997; Bartone & Kiran, 2001). In these applications, pseudolite measurements can provide an extra check on the integrity of navigation solutions (Pervan et al., 1994). In addition, rapid change of the geometry between the pseudolites and the users can speed up the carrier phase integer ambiguity resolution, which is a key prerequisite for precise navigation operations. A motion-based ambiguity resolution approach has been developed and tested by Cohen et al. (1993). It has been established that the pseudolite ranging signals can contribute to the satellite positioning systems by enhancing the geometric strength, improving the availability, integrity, and reliability, and increasing the accuracy of the positioning solutions, especially in the height component (e.g., Morley & Lachappelle, 1998; Stone & Powell, 1998; Dai et al., 2001a; Wang et al., 2001b). It has been demonstrated that the pseudolite carrier phase measurements are of high precision, even at a very low elevation angle (e.g., Wang et al., 2001b). Precise pseudolite carrier phase measurements are under study for a wide range of applications, such as machine control at mining sites (Stone et. al., 1999), and deformation monitoring applications (Dai et al., 2001b; Barnes et al., 2002; Meng et al., 2002). With the introduction of pseudolite measurements, the success rate of ambiguity resolution and the reliability of positioning can be improved (Verhagen, 2001; 2002). 3.2 Pseudolite-only Positioning In principle pseudolites can replace the satellite constellation for positioning and navigation wherever satellite signals are unavailable, such as indoors, underground carparks, long tunnels, and even on other planets. Actually, the very first pseudolite application was pseudolite-only positioning (Harrington & Dolloff, 1976). A pseudolite-only positioning and navigation concept has been proposed and tested for indoor positioning (e.g., Zimmerman, 1996; Kee et al., 2000). The basic principle behind such an indoor positioning concept is still the ‘double-differencing’ procedure as used in precise GPS relative positioning. As with satellite-based positioning systems, the reliability of a pseudolite-based positioning system is very dependent on the strength of receiver-pseudolite geometry in the system. A simulation has been carried out to analyse the geometry strength for an indoor application scenario, in which five pseudolite transmitter antennas were installed on the ceiling (10 metres above the floor). Figure 3 shows the RDOP values for a rover moving around on the floor of the room (Wang et al., 2001c). In this scenario, the RDOP varies from 1.2 to 3.8, suggesting a reasonably good positioning geometry. Fig. 3 Indoor positioning scenario: 5 pseudolites 10m above the floor Simulation is a useful tool for pseudolite-based positioning design studies. A software simulation tool has been developed to predict achievable accuracies from an array of six pseudolites within a tunnel (Calijan, 1996). Such a simulation study has shown that deployment of six pseudolites with a good geometry can potentially provide 1-5 cm horizontal positioning accuracies within a tunnel of 150m in length. These positioning accuracies are sufficient for vehicle tracking and control in future Automated Highway Systems (AHS). A novel approach has been suggested for the use of pseudolites in Mars explorations (LeMaster & Rock, 1999). Figure 4 shows a Mars pseudolite array, designed to provide centimetre-level location and attitude  52 Journal of Global Positioning Systems information to robotic rovers. This high accuracy navigation capability is also a key technical requirement for future astronaut/robot exploration teams to Mars. Fig. 4 Mars Pseudolite Array (LeMaster & Rock, 1999) Just like other pseudolite-based positioning systems, the locations of the pseudolites need to be precisely determined. However, this will be a difficult task when placing the pseudolites on another planet like Mars. To address such a challenge, a new pseudolite positioning system, a Self-Calibrating Pseudolite Array (SCPA), has been proposed by the Aerospace Robotics Laboratory at Stanford University (LeMaster, 2002). As mentioned earlier, the pseudolites used in such a system are actually transceivers. The transceivers can transmit and receive ranging signals to determine the relative locations of all the pseudolites in the array. As shown in Figure 5 (LeMaster, 2002), a transceiver consists of a transmitter (PL) and a receiver (Rec), which can essentially receive the signals from all the transmitters including the one inside the transceiver itself. This hardware design enables the cancellation of both transmitter and receiver clock errors without using a separate reference station, which is normally required for typical differential satellite positioning. Fig. 5 Double differencing with transceivers (LeMaster, 2002) Pseudolite-only postioning can also be based on the so- called inverted positioning concept (Raquet et al., 1995). In such a positioning scenario a reference pseudolite, a user/mobile pseudolite and four or more receivers are needed. Similar to GPS relative positioning, the double- differenced measurements between pseudolites and receivers can be formed to remove most of the systematic errors, such as transmitter and receiver clock errors. The receiver and reference pseudolite locations should be precisely pre-determined. With the known coordinates for the receivers and the reference pseudolite, the coordinates for the user pseudolite can be determined. Extensive experiments have been conducted to evaluate the performance under various operating environments (e.g., O’Keefe et al., 1999; Tsujii et al., 2001; Dai et al., 2002; Barnes et al., 2002). As with satellite-based positioning systems, the reliability of an inverted pseudolite positioning system is very dependent on the strength of geometry of the receivers and pseudolites used in the system. For an inverted pseudolite positioning system, a poor geometry will be one in which all the receivers and pseudolites lie approximately in the same plane (Pachter & Mckay, 2000). Such poor geometry will amplify the errors in the positioning solutions. Also, ‘unfavorable’ geometry may occur, for example, when the transmitter antenna stays directly over the centre of a planar four-receiver square. In this situation the design matrix of the measurement equations will become singular, and thus there is no unique positioning solution. Such situations can be identified through a full simulation for all possible trajectories and excluded from positioning operations. 3.3 Integration of GPS, Pseudolites and INS Given the flexibility that pseudolites can offer, pseudolites can be combined with other sensors such as INS. In contrast to satellite/pseudolite-based positioning systems, INS is self-contained and autonomous. Thus, INS systems are independent of any external signals. However, one of main drawbacks of INS, when operated as a stand-alone system, is the time-dependent growth of systematic errors. GPS measurements are typically used to calibrate INS systematic errors. GPS signals might be obstructed for extended time periods under difficult operational conditions, during which the performance of integrated GPS/INS systems may degrade rapidly. This issue can be addressed by the inclusion of pseudolite signals. An integrated GPS/INS/pseudolite or INS/pseudolite system would be able to improve system performance under a wide variety of poor operational environments. Such an integration concept has been proposed and tested (Wang et al., 2001c, Grejner- Brzezinska et al., 2002), demonstrating the feasibility and potential for a GPS/INS/PL system. Extensive simulation studies have demonstrated that an integrated PL/INS system can provide a stable and high precision navigation solution for indoor applications (Lee et al., 2002). The reliability and accuracy of an integrated PL/INS system is dependent on the geometric distribution of the pseudolites deployed within the system. Figure 6 shows the DOP values for two different pseudolite geometric scenarios, indicating a significant difference in the geometric strength. As shown in Figure 7, the better pseudolite geometry will lead to better performance 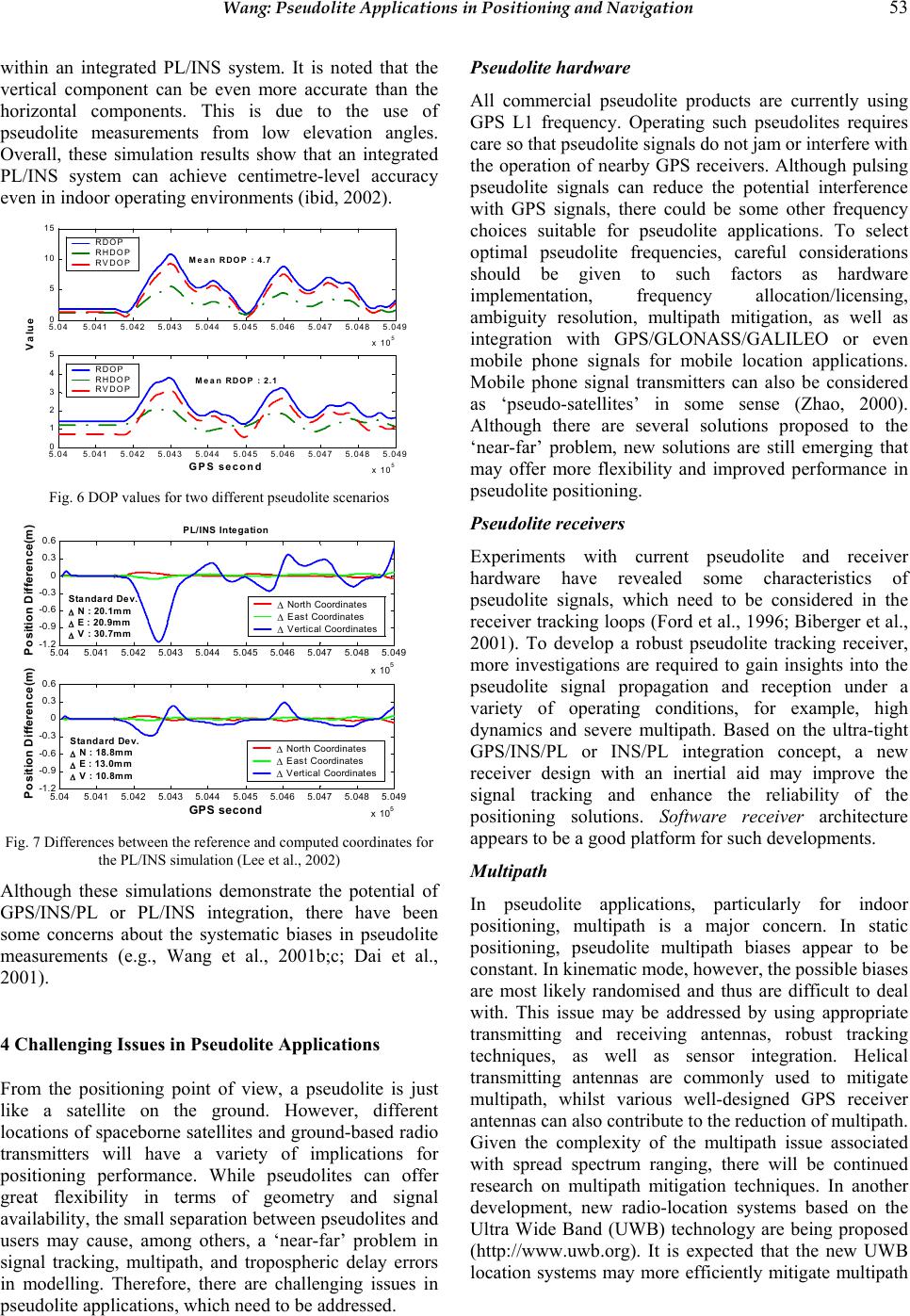 Wang: Pseudolite Applications in Positioning and Navigation 53 Pseudolite hardware within an integrated PL/INS system. It is noted that the vertical component can be even more accurate than the horizontal components. This is due to the use of pseudolite measurements from low elevation angles. Overall, these simulation results show that an integrated PL/INS system can achieve centimetre-level accuracy even in indoor operating environments (ibid, 2002). All commercial pseudolite products are currently using GPS L1 frequency. Operating such pseudolites requires care so that pseudolite signals do not jam or interfere with the operation of nearby GPS receivers. Although pulsing pseudolite signals can reduce the potential interference with GPS signals, there could be some other frequency choices suitable for pseudolite applications. To select optimal pseudolite frequencies, careful considerations should be given to such factors as hardware implementation, frequency allocation/licensing, ambiguity resolution, multipath mitigation, as well as integration with GPS/GLONASS/GALILEO or even mobile phone signals for mobile location applications. Mobile phone signal transmitters can also be considered as ‘pseudo-satellites’ in some sense (Zhao, 2000). Although there are several solutions proposed to the ‘near-far’ problem, new solutions are still emerging that may offer more flexibility and improved performance in pseudolite positioning. 5.045.041 5.0425.043 5.044 5.045 5.046 5.0475.048 5.049 x 105 0 5 10 15 RDOP RHDOP RVDOP 5.045.041 5.0425.043 5.044 5.045 5.046 5.0475.048 5.049 x 105 0 1 2 3 4 5 GPS second Value RDOP RHDOP RVDOP Mean RDOP : 4.7 Mean RDOP : 2.1 Fig. 6 DOP values for two different pseudolite scenarios Pseudolite receivers 5.045.041 5.042 5.043 5.0445.045 5.046 5.047 5.048 5.049 x 105 -1.2 -0.9 -0.6 -0.3 0 0.3 0.6 PL/INS Integation Position Difference(m) ∆ North Coordinates ∆ East Coordinates ∆ Vertical Coordinates 5.045.041 5.042 5.043 5.0445.045 5.046 5.047 5.048 5.049 x 105 -1.2 -0.9 -0.6 -0.3 0 0.3 0.6 GPS second Position Difference(m) ∆ North Coordinates ∆ East Coordinates ∆ Vertical Coordinates Standard Dev. ∆ N : 20.1mm ∆ E : 20.9mm ∆ V : 30.7mm Standard Dev. ∆ N : 18.8mm ∆ E : 13.0mm ∆ V : 10.8mm Experiments with current pseudolite and receiver hardware have revealed some characteristics of pseudolite signals, which need to be considered in the receiver tracking loops (Ford et al., 1996; Biberger et al., 2001). To develop a robust pseudolite tracking receiver, more investigations are required to gain insights into the pseudolite signal propagation and reception under a variety of operating conditions, for example, high dynamics and severe multipath. Based on the ultra-tight GPS/INS/PL or INS/PL integration concept, a new receiver design with an inertial aid may improve the signal tracking and enhance the reliability of the positioning solutions. Software receiver architecture appears to be a good platform for such developments. Fig. 7 Differences between the reference and computed coordinates for the PL/INS simulation (Lee et al., 2002) Multipath Although these simulations demonstrate the potential of GPS/INS/PL or PL/INS integration, there have been some concerns about the systematic biases in pseudolite measurements (e.g., Wang et al., 2001b;c; Dai et al., 2001). In pseudolite applications, particularly for indoor positioning, multipath is a major concern. In static positioning, pseudolite multipath biases appear to be constant. In kinematic mode, however, the possible biases are most likely randomised and thus are difficult to deal with. This issue may be addressed by using appropriate transmitting and receiving antennas, robust tracking techniques, as well as sensor integration. Helical transmitting antennas are commonly used to mitigate multipath, whilst various well-designed GPS receiver antennas can also contribute to the reduction of multipath. Given the complexity of the multipath issue associated with spread spectrum ranging, there will be continued research on multipath mitigation techniques. In another development, new radio-location systems based on the Ultra Wide Band (UWB) technology are being proposed (http://www.uwb.org). It is expected that the new UWB location systems may more efficiently mitigate multipath 4 Challenging Issues in Pseudolite Applications From the positioning point of view, a pseudolite is just like a satellite on the ground. However, different locations of spaceborne satellites and ground-based radio transmitters will have a variety of implications for positioning performance. While pseudolites can offer great flexibility in terms of geometry and signal availability, the small separation between pseudolites and users may cause, among others, a ‘near-far’ problem in signal tracking, multipath, and tropospheric delay errors in modelling. Therefore, there are challenging issues in pseudolite applications, which need to be addressed. 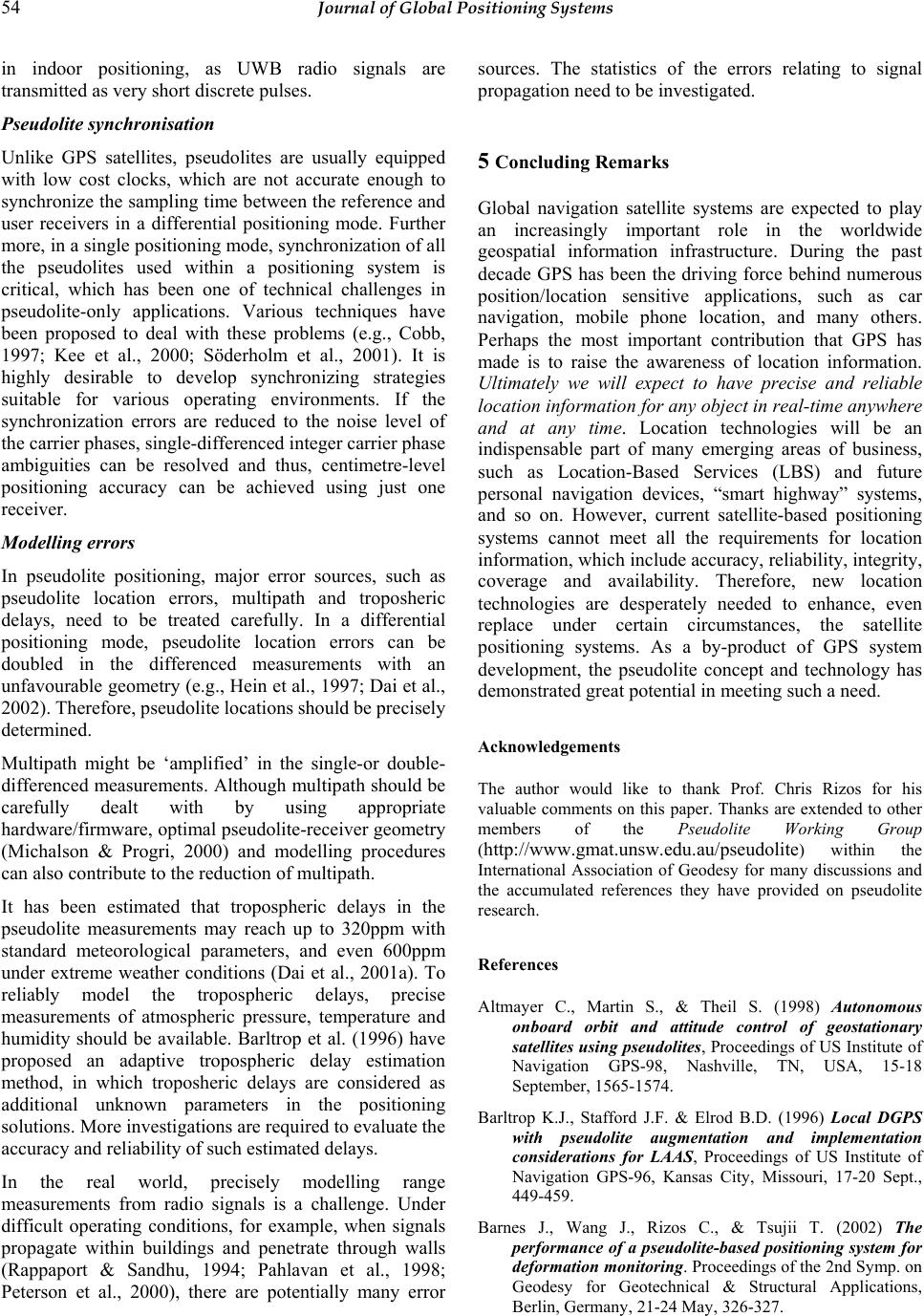 54 Journal of Global Positioning Systems in indoor positioning, as UWB radio signals are transmitted as very short discrete pulses. Pseudolite synchronisation Unlike GPS satellites, pseudolites are usually equipped with low cost clocks, which are not accurate enough to synchronize the sampling time between the reference and user receivers in a differential positioning mode. Further more, in a single positioning mode, synchronization of all the pseudolites used within a positioning system is critical, which has been one of technical challenges in pseudolite-only applications. Various techniques have been proposed to deal with these problems (e.g., Cobb, 1997; Kee et al., 2000; Söderholm et al., 2001). It is highly desirable to develop synchronizing strategies suitable for various operating environments. If the synchronization errors are reduced to the noise level of the carrier phases, single-differenced integer carrier phase ambiguities can be resolved and thus, centimetre-level positioning accuracy can be achieved using just one receiver. Modelling errors In pseudolite positioning, major error sources, such as pseudolite location errors, multipath and troposheric delays, need to be treated carefully. In a differential positioning mode, pseudolite location errors can be doubled in the differenced measurements with an unfavourable geometry (e.g., Hein et al., 1997; Dai et al., 2002). Therefore, pseudolite locations should be precisely determined. Multipath might be ‘amplified’ in the single-or double- differenced measurements. Although multipath should be carefully dealt with by using appropriate hardware/firmware, optimal pseudolite-receiver geometry (Michalson & Progri, 2000) and modelling procedures can also contribute to the reduction of multipath. It has been estimated that tropospheric delays in the pseudolite measurements may reach up to 320ppm with standard meteorological parameters, and even 600ppm under extreme weather conditions (Dai et al., 2001a). To reliably model the tropospheric delays, precise measurements of atmospheric pressure, temperature and humidity should be available. Barltrop et al. (1996) have proposed an adaptive tropospheric delay estimation method, in which troposheric delays are considered as additional unknown parameters in the positioning solutions. More investigations are required to evaluate the accuracy and reliability of such estimated delays. In the real world, precisely modelling range measurements from radio signals is a challenge. Under difficult operating conditions, for example, when signals propagate within buildings and penetrate through walls (Rappaport & Sandhu, 1994; Pahlavan et al., 1998; Peterson et al., 2000), there are potentially many error sources. The statistics of the errors relating to signal propagation need to be investigated. 5 Concluding Remarks Global navigation satellite systems are expected to play an increasingly important role in the worldwide geospatial information infrastructure. During the past decade GPS has been the driving force behind numerous position/location sensitive applications, such as car navigation, mobile phone location, and many others. Perhaps the most important contribution that GPS has made is to raise the awareness of location information. Ultimately we will expect to have precise and reliable location information for any object in real-time anywhere and at any time. Location technologies will be an indispensable part of many emerging areas of business, such as Location-Based Services (LBS) and future personal navigation devices, “smart highway” systems, and so on. However, current satellite-based positioning systems cannot meet all the requirements for location information, which include accuracy, reliability, integrity, coverage and availability. Therefore, new location technologies are desperately needed to enhance, even replace under certain circumstances, the satellite positioning systems. As a by-product of GPS system development, the pseudolite concept and technology has demonstrated great potential in meeting such a need. Acknowledgements The author would like to thank Prof. Chris Rizos for his valuable comments on this paper. Thanks are extended to other members of the Pseudolite Working Group (http://www.gmat.unsw.edu.au/pseudolite) within the International Association of Geodesy for many discussions and the accumulated references they have provided on pseudolite research. References Altmayer C., Martin S., & Theil S. (1998) Autonomous onboard orbit and attitude control of geostationary satellites using pseudolites, Proceedings of US Institute of Navigation GPS-98, Nashville, TN, USA, 15-18 September, 1565-1574. Barltrop K.J., Stafford J.F. & Elrod B.D. (1996) Local DGPS with pseudolite augmentation and implementation considerations for LAAS, Proceedings of US Institute of Navigation GPS-96, Kansas City, Missouri, 17-20 Sept., 449-459. Barnes J., Wang J., Rizos C., & Tsujii T. (2002) The performance of a pseudolite-based positioning system for deformation monitoring. Proceedings of the 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 326-327.  Wang: Pseudolite Applications in Positioning and Navigation 55 Bartone C. G. & Kiran S. (2001) Flight test results of an integrated wideband airport pseudolite for the local area augmentation system, Navigation, 48(1): 35-48. Beser J. & Parkinson B.W. (1982) The application of NAVSTAR differential GPS in the civilian community, Navigation, 29(2): 107-136. Biberger R.J., Hein G.W., Eissfeller B., Oehler V., Schueler T. (2001) Pseudolite signal creeping on conducting surfaces, Proceedings of US Institute of Navigation GPS- 2001, Salt Lake City, Utah, 11-14 September, 1238-1244. Brown A.K. (1992) A GPS precision approach and landing system, Proceedings of US Institute of Navigation GPS-92, Albuquerque, New Mexico, 16-18 Sept., 373-381. Cobb H.S. (1997) GPS pseudolites: Theory, design, and applications, PhD Dissertation, Stanford University. Cohen C.E., Pervan B.S., Cobb, H.S., Lawrence D.G., Powell J.D. & & B.W. Parkinson (1993) Real time cycle ambiguity resolution using a pseudolite for precision landing of aircraft with GPS, The Second International Symposium on Differential Satellite Navigation Systems DSNS’93, Amsterdam, The Netherlands, March 30-April 2, 171-178. Corazzini T. & How J.P. (1999) Onboard Pseudolite Augmentation System for Relative Navigation, Proceedings of US Institute of Navigation GPS-99, Nashville, TN, Sept. 1999, pp. 1559-1568 Dai L., Wang J., Tsujii T., & Rizos C. (2001a) Pseudolite applications in positioning and navigation: Modelling and geometric analysis, Int. Symp. on Kinematic Systems in Geodesy, Geomatics & Navigation (KIS2001), Banff, Canada, 5-8 June, 482-489. Dai L., Wang J., Rizos C. & Han S. (2001b) Pseudo-satellites applications in deformation monitoring, GPS Solutions, 5(3), 80-87 Dai L., Wang J., Tsujii T., & Rizos C. (2002) Inverted pseudolite positioning and its applications, Accepted for publication Survey Review. Dovis F., Kandus G., Magli E. & Olmo G. (2000) Integration of stratospheric platforms within the GNSS2 system, Proceedings of GNSS-2000, Edinburgh, U.K., 1-4 May. CD-ROM proc. Elrod B.D. & Van Dierendonck A.J. (1996) Pseudolites. In: B.W. Parkinson & J.J. Spilker (eds.), Global Positioning System: Theory and Applications (Vol. II), American Institute of Astronautics, Washington D.C., 51-79. Ford T., Neumann J., Toso N., Petersen W., Anderson C., Fenton P., Holden T. & Barltrop K. (1996) HAPPI – A high accuracy pseudolite/GPS positioning integration, Proceedings of US Institute of Navigation GPS-96, Kansas City, Missouri, 17-20 Sept., 1719-1728. Galijan R.C. and Lucha G.V. (1993) A suggested approach for augmenting GNSS Category III approaches and landings: the GPS/GLONASS and Glonass pseudolite system, Proceedings of US Institute of Navigation GPS-93, Salt Lake City, Utah, 22-24 September, 157-160. Galijan R.C. (1996) Analysis and simulation of a candiate deployment geometry and characteristics of pseudolites with a tunnel, Proceedings of US Institute of Navigation GPS-96, Kansas City, 17-20 September, 527-533. Grejner-Brzezinska D., Yi Y., Wang J. (2002) Design and navigation performance analysis of an experimental GPS/INS/PL system, 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 452- 461. Harrington R.L. & Dolloff J.T. (1976) The inverted range: GPS user test facility, IEEE PLANS’76, San Diego, California, 1-3 Nov., 204-211. Hein G.W. (2002) Personal communications. Hein G.W., Eissfeller B., Werner W., Ott B., Elrod B.D., Barltrop K.J. & Stafford J.F. (1997) Practical investigation on DGPS for aircraft precision approaches augmented by pseudolite carrier phase tracking, Proceedings of US Institute of Navigation GPS-97, Kansas City, Missouri, 16-19 Sept., 1851-1860. Holden T. & Morely T. (1997) Pseudolite augmented DGPS for land applications, Proceedings of US Institute of Navigation GPS-97, Kansas City, Missouri, 16-19 Sept., 1397-1404. ITT (2002) 746th GPS Test Range, GPS World, February, http://www.gpsworld.com. Kalafus R.M., Van Dierendock A.J. & Pealer N. (1986) Special Committee 104 recommendations for differential GPS service. Global Positioning System (red book), The Institute of Navigation, Vol. I, 101-126. Kee C., Jun H., Yun D., Kim B., Kim Y., Parkinson B.W., Langestein T., Pullen S. & Lee J. (2000) Development of indoor navigation system using asynchronous pseudolites, US Institute of Navigation GPS-2000, Salt Lake City, Utah, 19-22 Sept, 1038-1045. Klein D. & Parkinson B.W. (1986) The use of pseudo-satellites for improving GPS performance, Global Positioning System (red book), Vol III, Institute of Navigation, 1986, 135-146. Lee H.Y., Wang J., & Rizos C. (2002) Kinematic positioning with an integrated GPS/pseudolite/INS, 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 314-325. LeMaster E.A. (2002) Self-Calibrating Pseudolite Arrays: Theory and Experiment, Ph.D. Thesis, Stanford University. LeMaster E. A. & Rock S. (1999) Mars exploration using self- calibrating pseudolite arrays, Proceedings of US Institute of Navigation GPS-99, Nashville, Tennessee, 14-17 Sept., 1549-1558. Madhani P.H., Axelrad P., Krumvieda K. Thomas J. (2001) Mitigation of the near-far problem by successive interference cancellation, Proceedings of US Institute of Navigation GPS-2001, Salt Lake City, Utah, 11-14 Sept, 148-154. Meng X., Roberts G.W., Dodson A.H., Cosser E., Noakes C. (2002) Simulation of the effects of introducing pseudolite  56 Journal of Global Positioning Systems data into bridge deflection monitoring data, Proceedings of 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 372-381. Michalson M.R. & Progri .I.F. (2000) Assessing the accuracy of underground positioning using pseudolites, Proceedings of US Institute of Navigation GPS-2000, Salt Lake City, Utah, 19-22 Sept., 1007-1005. Morley T. & Lachapelle G. (1998) Pseudolite augmentation for OTF ambiguity resolution in shipborne mode, Journal of Surveying Engineering, 124(1): 26-39. O’Keefe K., Sharma J., Cannon M.E. & Lachapelle G. (1999) Pseudolite-based inverted GPS concept for local area positioning, Proceedings of US Institute of Navigation GPS-99, Nashville, Tennessee, 14-17 Sept., 1523-1530. Rappaport T.S. & Sandhu S. (1994) Radio-wave propagation for emerging wireless personal-communication systems, IEEE Antennas and Propagation Magazine, 36(5):14-23. Raquet J., Lachapelle J., Qui W., Pelletier C., Nash A., Fenton P. & Holden T. (1995) Development and testing of a mobile pseudolite concept for precise positioning, Proceedings of US Institute of Navigation GPS-95, Palm Springs, California, 12-15 Sept., 817-825. Pachter M. & Mckay J.B. (1998) Geometry optimization of a GPS-based navigation reference system, Navigation, 44(4), 457-470. Pahlavan K., Krishnamurthy P. and Beneat J. (1998) Wideband radio propagation modelling for indoor geolocation applications, IEEE Coummunication Magazine, April, 60- 65. Parkinson B.W. & Fitzgibbon K.T. (1986) Optimal locations of pseudolites for differential GPS, Navigation, 33(4), 259- 283. Pervan B., Cohen C.E. & Parkinson B.W. (1994) Integrity monitoring for precision approach using kinematic GPS and a ground-based pseudolite, Navigation, 41(2), 159- 174 Peterson B.B., Kmiecik C.G., Nguyen H. & Kaspar B. (2000) Indoor geolocation system operational test results, Navigation, 47(3):157-166. Progri I.F. & Michalson W.R. (2001) An Alternative Approach to Multipath and Near-Far Problem for Indoor Geolocation Systems, Proceedings of US Institute of Navigation GPS-2001, Salt Lake City, Utah, 11-14 September 1434-1467 Söderholm S., Juhola T., Saarnimo T., Karttunen V. (2001), Indoor navigation using a GPS receiver, Proceedings of US Institute of Navigation GPS-2001, Salt Lake City, Utah, 11-14 September, 1479-1486 Stansel T. A. Jr. (1986) RTCM SC-104 Recommended pseudolite signal specification, Global Positioning System, Vol. 3, The US Institute of Navigation, 1986, 117- 134. Stone J.M., LeMaster E.A., Powell J.D. & Rock S. (1999) GPS Pseudolite Transceivers and Their Applications, Proceedings of US ION National Technical Meeting, San Diego, California, 25-27 January, 415-424. Tsujii T., Rizos C., Wang J., Dai L., Roberts C. & Harigae M. (2001) A navigation/positioning service based on pseudolites installed on stratospheric airships, 5th Int. Symp. on Satellite Navigation Technology & Applications, Canberra, Australia, 24-27 July, CD-ROM. Tuohino J.L., Farley M.G. & James R.R. (2000) Military pseudolite flight test results, Proceedings of US Institute of Navigation GPS-2000, 19-22 September, Salt Lake City, UT, 2079-2088. Van Dierendonck A.J., Elrod B.D. and Melton W.C. (1989) Improving the integrity, availability and accuracy of GPS using pseudolites, Proceedings of NAV’89, London, UK, Oct 17-19, 1989, paper 32. Verhagen S. (2001) Ambiguity resolution and success rates with an integrated GNSS - pseudolite positioning system, Proceedings of US Institute of Navigation GPS 2001, Salt Lake City, Utah, 11-14 September 1436-1478. Verhagen S. (2002) Internal and external reliability of an integrated GNSS – pseudolite positioning system, Proceedings of 2nd Symp. on Geodesy for Geotechnical & Structural Applications, Berlin, Germany, 21-24 May, 314- 325. Wang J. (2000) An approach to Glonass ambiguity resolution, Journal of Geodesy, 74(5), 421-430. Wang J., Rizos C., Stewart M.P., & Leick A. (2001a) GPS and Glonass integration: Modelling and ambiguity resolution issues, GPS Solutions, 5(1), 55-64. Wang J., Tsujii T., Rizos C., Dai L. & Moore M. (2001b) GPS and pseudo-satellites integration for precise positioning. Geomatics Research Australasia, 74:103-117. Wang J., L. Dai, T. Tsujii, C. Rizos, D. Grejner-Brzezinska & C.K. Toth (2001c) GPS/INS/Pseudolite integration: Concepts, simulation and testing, Proceedings of US Institute of Navigation GPS-2001, Salt Lake City, Utah, 11-14 September, 2708-2715 Wawrzyniak G., Lightsey E.G., Key K.W. (2001) Ground experimentation of a pseudolite-only method for the relative positioning of two spacecraft, Proceedings of US Institute of Navigation GPS-2001, Salt Lake City, Utah, 11-14 September 1436-1478 Weiser M. (1998) Development of a carrier and C/A-code based pseudolite system, Proceedings of US Institute of Navigation GPS-98, Nashville, USA, September, pp. 1465- 1475. Zhao Y. (2000) Mobile phone location determination and its impact on intelligent transportation systems, IEEE Transactions on Intelligent Transportation Systems, 1(1):55-64. Zimmerman K.R. (1996) Experiments in the use of Global Positioning System for space vehicle rendezvous, PhD thesis, Standford University. Zimmerman K.R., Cohen C.E., Lawrence D.G., Montgomery P.Y., Cobb H.S. & Melto W.C. (2000) Multi-frequency pseudolites for instantaneous carrier ambiguity resolution, Proceedings of US Institute of Navigation GPS-2000, Salt Lake City, Utah, 19-22 Sept., 1024-1030
|