Crayfish Robot That Generates Flow Field to Enhance Chemical Reception ()
1. Introduction
Many aquatic animals rely on their olfaction when searching for food [1-3]. For example, sharks are famous for their keen sense of smell, and are known to find food by tracking odor plumes. When they perceive a smell of food, they proceed in the upstream direction [1]. Since molecular diffusion of chemical substances into water is extremely slow (only 5 mm in 1 h) [4], fluid flow is the main force for the dispersal of chemical molecules in most underwater environments. Therefore, upstream progress upon detection of a chemical substance generally brings a searcher closer to the chemical source. This type of behavior is termed odor-gated rheotaxis [3], and is known to be the behavioral basis of variety of animals [1]. Underwater robots with such chemical sensing capabilities could be applied to search for chemical sources. There are places in the sea where hazardous or toxic chemicals, e.g., chemical weapons [5] and unexploded ordnance [6], are left or dumped. Chemical leakage from undersea wreckage [7] also causes serious trouble to the local people. Although these chemicals must be localized and removed for the protection of the marine environment, to find them out is an extremely laborious task for human divers. Underwater robots can accomplish the chemical search more effectively if appropriate sensors and search algorithms are provided.
Olfactory signals spread in the environment by diffusion and advection of odor molecules [8]. Animals perceive odors when the odor molecules actually reach the surfaces of the olfactory receptor cells. In order to achieve sensitive odor detection, many animals make efforts to collect odor molecules effectively onto the olfactory receptor cells [9]. It is expected that mimicking such odor collection behavior will lead to great improvements in chemical detection and chemical localization abilities of the robots [9]. In rivers and tides, odor molecules are transported by water flow and form odor plumes. Therefore, the smell of food can be perceived at far downstream locations, and animals can employ odor-gated rheotactic strategies to search for food. However, there are many places where the flow velocity is extremely small. Under such stagnant flow conditions, the released odor molecules stay in the immediate vicinity of the source. Therefore, spontaneous arrival of odor molecules on the olfactory receptor cells cannot be expected. Olfactory search for food becomes particularly laborious since no smell can be perceived even if the food is only a few centimeters away. In rivers and tides, temporal variations of the chemical distribution caused by turbulence of the flow and fluctuations of the flow direction make the olfactory search an awkward task. A chemical distribution developed under stagnant flow conditions is more stable, and therefore, fluctuations in the chemical signals perceived by animals are significantly smaller. However, the limited dispersal of the odorants poses a tough challenge.
Nevertheless, crayfish prefer to live in still water, e.g., at the bottom of a lake or a pond. Even though crayfish are known to show upstream plume tracking behavior in strong water flow [3], they can also search for food by using their olfaction even under stagnant flow conditions. Their fan organs (exopodites of maxillipeds) are considered to help in collecting odor molecules effectively [4, 10]. A crayfish has three pairs of maxillipeds around the mouth opening below the major chemoreceptor organs (antennules), as shown in Figure 1. Feathered hairs extending on both sides of the distal part of the exopodite of each maxilliped form a fan-like shape. By waving the feathered appendages, a crayfish actively generates two outgoing water jets. Upward water currents directed to the antennules and incoming flow converging to the maxillipeds are induced because of fluid entrainment by the jets. As shown in Figure 2(a), the induced flow brings odor samples from distant places to the chemoreceptors on the antennules, and thus, the smell of the food is perceived. Inactivation of the fan organs of crayfish results in a significant decrease in their success in finding an odor source, which suggests the importance of the actively generated water currents for the success in olfactory search under the stagnant flow conditions [10].
The goal of this research project is to develop an underwater robot that can autonomously locate chemical sources. Toward successful applications of such robots in real environments, various technological challenges need to be overcome. They include the development of autonomous underwater vehicle platforms and appropriate chemical sensors, as well as devising effective search strategies and optimizing the sensor configurations. Our focus is on the latter two issues. Two underwater robots with chemical plume tracking capabilities have been reported so far in the literature. Both of them are based on the rheotactic strategies, assuming the existence of sufficiently strong water flow and chemical plumes with well-defined shapes [11,12]. In contrast, here we report a crayfish robot designed to search for chemical sources under stagnant flow conditions. The robot is not only equipped with an array of chemical sensors, but also with

Figure 1. Crayfish, Procambarus clarkii.
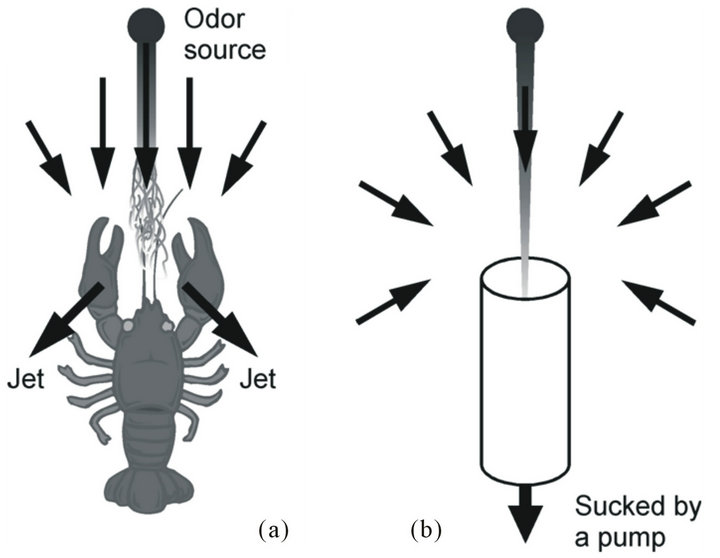
Figure 2. Flow fields generated by (a) a crayfish waving the maxillipeds and (b) a suction pump.
a flow generator to enhance chemical reception by drawing surrounding water samples to the sensors. In our previous work, the underwater robotic system with a suction pump was developed [13]. The newly developed autonomous mobile robot described in this paper is equipped with a pair of arms mimicking the maxillipeds of a crayfish. Experimental results are presented to show that the flow field generated by waving maxilliped arms is more effective in enhancing chemical reception than that generated by a pump. Although the rheotactic strategy for chemical source localization is not applicable under stagnant water conditions, the proposed crayfish robot can locate a chemical source using a chemotactic search strategy.
The structure of the rest of the paper is as follows. In Section 2, descriptions of the crayfish robot and its prototypes are provided. In Section 3, experimental results on testing different ways of waving the maxilliped arms are presented. In Section 4, comparison is made between the flow fields generated by the maxilliped arms and a pump. In Sections 5 and 6, results of experiments on chemical source localization are summarized. Section 7 concludes the paper.
2. Experimental
2.1. Crayfish Robot
The detailed analysis of the flow patterns generated by crayfish revealed their high efficiency in collecting odor samples [10]. If water is sucked through a pipe using a pump as in our previous work [13], the inlet opening of the pipe can be regarded as a point sink [10]. In this case, a spherically symmetric flow field is generated, as shown in Figure 2(b). The flow velocity decreases with the inverse square of the distance [10]. In contrast, the inflow generated by fluid entrainment of jets decays more slowly. It was experimentally shown that the velocity decay of the inflow generated by a crayfish is inversely proportional to the distance [10].
Figure 3 shows our crayfish robot (350 mm long). The head part of the robot is equipped with arms mimicking the crayfish maxillipeds. To generate unidirectional water currents, a crayfish actively flexes and extends the feathered hairs of the maxillipeds synchronously with the waving motion of the maxillipeds [4]. To make the arm wave in a similar way, a plastic fan (8 mm × 6 mm) was attached on the tip of each stainless-steel maxilliped arm using an elastic hinge, as shown in Figure 4. During the power stroke, the fan is kept extended by the support of the arm as shown in Figure 4(a), and water current is generated. During the recovery stroke, the fan is folded as shown in Figure 4(b) owing to the fluid resistance. Thus, generation of a water current in the opposite direction is minimized. The size of the plastic fan is roughly twice as large as the feathered tip of a crayfish maxilliped.
As shown in Figure 5, a pair of maxilliped arms are placed on the left and right sides of an array of sensing electrodes of the electrochemical sensors. The distance between the left and right arms is 50 mm. Each maxilliped arm is driven by a parallel crank mechanism and a

Figure 4. (a) During the upward stroke of a maxilliped arm, the fan acts like a paddle; (b) During the recovery stroke, the hinge is folded due to the drag by water.

Figure 5. Head part of the crayfish robot; (a) Front view; (b) Rear view.
step motor (SPG20-298, Copal Electronics Corp.) placed above the water surface. The maxilliped arms are waved at 5 Hz by adjusting the speeds of the step motors using a microcontroller (PIC12F683, Microchip). This frequency was chosen to be the same as the frequency at which crayfish wave their maxillipeds [4]. By waving the maxilliped arms vertically by 90˚, the crayfish robot generates upward water currents. Consequently, inflow that draws water samples to the sensing electrodes from the surroundings is induced as shown in Figure 5(a).
The body of the robot was made using a waterproof plastic container. A silicone rubber seal placed between the upper rim of the container body and its detachable lid prevents water from seeping in. Commercially available rotary shaft seals (Turcon Roto Variseal, Trelleborg Sealing Solutions) keep water from entering through gaps between the shafts of the driving wheels and the sockets. A weight was loaded to prevent the robot from floating up during the experiments.
The robot is equipped with two independent wheels driven by DC geared motors (TG47C VM-230-KBED, Tsukasa Electric Co.). An EyeBot (JOKER Robotics) is employed as a main controller of the robot. A Motorola 68332 microcontroller operated at 25 MHz processes the received sensor responses and sends the control signals to the motors. The feedback signals from the rotary encoders on the DC motors are used for odometry. The sensor responses and the odometry data are sent to an external PC through serial communication in order to record the data for detailed off-line analysis. A lithiumion rechargeable battery with a capacity of 1500 mAh (NP-400, Konica Minolta Holdings, Inc.) can supply electric power to the robot up to 90 min.
Amperometric electrochemical sensors are used to detect chemical substances. Four carbon working electrodes with a diameter of 0.9 mm are placed at the front part of the robot head. These working electrodes share a silver reference electrode and a stainless-steel counter electrode, which are placed on the bottom of the robot head. A potentiostat circuit controls the voltage between the working electrodes and the reference electrode at a certain set point (0.7 - 0.8 V). The current generated by oxidation or reduction of a target chemical at each working electrode is converted to a voltage output. A dedicated microcontroller (PIC16F690, Microchip) measures the four voltage outputs of the potentiostat circuit, and sends the voltage values to the EyeBot controller. The sensing electrodes are numbered from the left to the right of the robot as shown in Figure 5(a).
When in search of a chemical source, the robot examines the existence of a chemical substance in the collected water samples, and starts to move if the response of any of the four sensors exceeds a predefined threshold. The robot proceeds in the direction of the sensor with the largest response. When the largest signal is obtained from sensor 1, the robot turns counterclockwise by 8˚ and then moves forward by 6 mm. When the output of sensor 2 is the largest, the turning angle is reduced to 4˚. If sensor 3 or 4 shows the highest response, the robot moves in a similar way except that the turn is made in the clockwise direction. It was sometimes observed that a water sample drawn to the sensor stayed on the carbon working electrode even after the forward movement of the robot. To wait for the water samples around the sensors to be replaced, the robot pauses for one second after each forward movement. The direction determination is performed based on the sensor output values measured after the pause.
2.2. Prototype Chemical Sensing Systems
Before the fabrication of the crayfish robot described in the previous section, the chemical sample collection efficiency of the maxilliped arms was investigated using prototype chemical sensing systems shown in Figure 6. Each of these systems is equipped with a pair of maxilliped arms and four electrochemical sensors on a robot head with the same shape. Crayfish can generate various flow fields by changing the waving direction of the maxillipeds [4]. In this work, two fundamental waving patterns, vertical and horizontal waving, were tested for reproduction of the flow field generated by a crayfish. Figure 6(a) shows the sensing system that waves the arms vertically. The maxilliped arms are placed on both sides of the sensing electrodes, and are driven by step motors and rack gears. Figure 6(b) shows the system that waves the arms horizontally. Each maxilliped arm is directly attached on the shaft of a step motor, and is placed behind the sensing electrodes.
To use a pump is probably the simplest and most widely used way for robots to generate water currents. To show the advantage of the maxilliped arms in the effectiveness on collecting water samples on the sensors, the water currents generated by a pump were compared in terms of chemical reception at the sensors with those generated by the maxilliped arms. As shown in Figure 7, a robot head equipped with a suction opening connected to a pump was prepared for this purpose. The shape of the robot head is same as that equipped with the maxilliped arms. A Plexiglas pipe with an inner diameter of 16 mm goes through the head, and the water is sucked from the opening placed behind the working electrodes of the electrochemical sensors.

Figure 6. Prototype chemical sensing systems with maxilliped arms waved (a) vertically and (b) horizontally.

Figure 7. Robot head with a suction opening connected to a pump.
2.3. Experimental Method
In the experiments on chemical source localization, the robot tried to detect a chemical substance in a small water pool (1300 mm × 800 mm) shown in Figure 8 unless otherwise specified. The pool was filled with salt water up to a depth of 100 mm. The step motors used for waving the maxilliped arms are the only non-waterproof parts of the crayfish robot. With the water depth of 100 mm, the sensing electrodes are fully immersed in the water while the water surface is maintained below the step motors. Aqueous solution of ascorbic acid with a concentration of 10 mm was used as the detection target because of its ease in electrochemical detection [14]. A small amount of fluorescent dye (10 mg/l of rhodamine 6G) was added to the ascorbic acid solution to enable the visual observation of the ascorbic acid distribution. The three-dimensional movement of the released chemical substance was observed in detail for the prototype sensing systems. The robot head was placed in a water tank (500 mm wide, 500 mm deep, and 155 mm high) made of transparent Plexiglas. The depth of salt water was set to 100 mm as in the other experiments.
Since a certain amount of supporting electrolyte is required for proper operation of the electrochemical sensors, salt (sodium chloride) was added to the background water and the ascorbic acid solution. The concentration of salt was adjusted to be in the range of 0.1 M to 0.485 M. The concentration of 0.485 M corresponds to the salinity of seawater, and was chosen in view of future applications of the robot in marine environments. The water pool holds 104 liters of water, and 2.9 kg of salt is required to attain the same salinity as the seawater. For the repeated experiments in the water pool, the concentration of salt was decreased to 0.1 M to reduce the consumption of salt. Cyclic voltammograms measured in 1 mM ascorbic acid solution with various salinities show that the decrease in the salt concentration to 0.1 M has no effect on the response of the carbon electrode sensor to ascorbic acid.
Figure 9 shows the coordinate system used to describe the location of a chemical source with respect to the robot head. The origin of the coordinate system is set to the center of the four sensing electrodes. The positive x-axis points forward, and the positive y-axis points to the left. A stainless-steel tube releasing ascorbic acid solution at a flow rate of 1 ml/min was used as a chemical source. The tip of the tube was pointed upward and placed at the same height as the maxilliped arms of the robot. In the experiments, the ascorbic acid solution was released from various locations around the robot head by changing the position of the tube. The chemical release was started when waving of the maxilliped arms was initiated.