1. Introduction
There are well-known procedures for putting a system of differential equations  (where v is a formal power series starting with quadratic terms) into normal form with respect to its linear part A. Our concern in this paper is to describe the normal form of the systemm
(where v is a formal power series starting with quadratic terms) into normal form with respect to its linear part A. Our concern in this paper is to describe the normal form of the systemm , that is the set of all v such that
, that is the set of all v such that  is in normal form where A is the linear part
is in normal form where A is the linear part  from the Stanley decomposition of the ring of invariants. Our main result is a procedure that solves the description problem where N is a nilpotent matrix with coupled n Jordan blocks, provided that the description problem is already solved for each Jordan block of N taken separately. Our method is based on adding one block at a time. This procedure will be illustrated with examples and then be generalized.
from the Stanley decomposition of the ring of invariants. Our main result is a procedure that solves the description problem where N is a nilpotent matrix with coupled n Jordan blocks, provided that the description problem is already solved for each Jordan block of N taken separately. Our method is based on adding one block at a time. This procedure will be illustrated with examples and then be generalized.
The idea of simplification near an equilibrium goes back at least to Poincare (1880), who was among the first to bring forth the theory in a more definite form. Poincare considered the problem of reducing a system of nonlinear differential equations to a system of linear ones. The formal solution of this problem entails finding nearidentity coordinate transformations, which eliminate the analytic expressions of the nonlinear terms.
Cushman et al. [1], using a method called covariant of special equivariant solved the problem of finding Stanley decomposition of . Their method begins by creating a scalar problem that is larger than the vector problem and their procedures are derived from classical invariant theory thus it was necessary to repeat calculations of classical invariants theory at the levels of equivariants. Malonza [2] solved the same problem by “Groebner” basis methods found in [3] rather than borrowing from classical theory.
. Their method begins by creating a scalar problem that is larger than the vector problem and their procedures are derived from classical invariant theory thus it was necessary to repeat calculations of classical invariants theory at the levels of equivariants. Malonza [2] solved the same problem by “Groebner” basis methods found in [3] rather than borrowing from classical theory.
Murdock and Sanders [4] developed an algorithm based on the notion of transventants to determine the form of normal form of a vector field with nilpotent linear part, when the normal form is known for each Jordan block of the linear part taken separately. The algorithm is based on the notion of transvectants from the classical invariant theory known as boosting to module of equivariants when the Stanley decomposition for the ring of invariants is known.
Namachchivaya et al. [5], studied a generalized Hopf bifurcation with non-semisimple 1:1 Resonance. The normal form for such a system contains only terms that belong to both the semisimple part of A and the normal form of the nilpotent, which is a coupled TakensBogdanov system with 
This example illustrates the physical significance of the study of normal forms for systems with nilpotent linear part.
Our results are mainly based on the work found in [4] that is application of transvectant’s method for computing normal form for the module of equivariants of nilpotent systems. In section two and three we put together background knowledge for understanding the content of this work. Section four forms the central part of this paper where we shall compute the module of equivariants.
2. Invariants and Stanley Decompositions
Let  denote the vector space of homogeneous polynomials of degree
denote the vector space of homogeneous polynomials of degree  on
on  with coefficients in
with coefficients in , where
, where  denotes the set of real numbers. Let
denotes the set of real numbers. Let  be the vector space of all such polynomials of any degree and let
be the vector space of all such polynomials of any degree and let  be the vector space of formal power series. If
be the vector space of formal power series. If ,
,  becomes the ring of formal power series on
becomes the ring of formal power series on , where
, where  denotes the set of real numbers. For such smooth vectors fields, it is sufficient to work polynomials. For any nilpotent matrix
denotes the set of real numbers. For such smooth vectors fields, it is sufficient to work polynomials. For any nilpotent matrix , we define the Lie operator
, we define the Lie operator

by
 (2.1)
(2.1)
and the differential operator

by
 (2.2)
(2.2)
Then  is a derivation of the ring
is a derivation of the ring , meaning that
, meaning that
 (2.3)
(2.3)
In addition,
 (2.4)
(2.4)
A function  is called an invariant of
is called an invariant of  if
if
 or equivalently
or equivalently  Since
Since


it follows that if f and  are invariants, so are
are invariants, so are  amd
amd ; that is
; that is  is both a vector space over
is both a vector space over  and also a subring of
and also a subring of , known as the ring of invariants. Similarly a vector field
, known as the ring of invariants. Similarly a vector field  is called an equivariants of
is called an equivariants of , if
, if  that is
that is

There are two normal form styles in common use for nilpotent systems, the inner product normal form and the sl(2) normal form. The inner product normal form is defined by  where
where  is the conjugate transpose of
is the conjugate transpose of . To define the sl(2) normal form, one first sets
. To define the sl(2) normal form, one first sets  and constructs matrices
and constructs matrices  and
and  such that
such that
 (2.5)
(2.5)
An example of such an  triad
triad  is
is

Having obtained the triad  we create two additional triads
we create two additional triads  and
and  as follows
as follows
 (2.6)
(2.6)
 (2.7)
(2.7)
The first of these is a triad of differential operators and the second is a triad of Lie operators. Both the operators  and
and  inherit the triad properties (2.5). Observe that the operators
inherit the triad properties (2.5). Observe that the operators  map each
map each
 into itself. It follows from the representation theory
into itself. It follows from the representation theory  that
that
 (2.8)
(2.8)
Clearly the  ia s subring of
ia s subring of , the ring of invariants and it follows from (2.4) that
, the ring of invariants and it follows from (2.4) that  is a module over this subring. This is the sl(2) normal form module.
is a module over this subring. This is the sl(2) normal form module.
3. Boosting Rings of Invariants to Module of Equivariants
In this section we describe the procedure for obtaining a Stanley decomposition of the module of equivariants (or normal form space ) when the Stanley decomposition of the ring of invariants is known.
) when the Stanley decomposition of the ring of invariants is known.
The module of all formal power series vector fields on  can be viewed as the tensor product
can be viewed as the tensor product  , and in fact the tensor product can be identified with the ordinary product (of a field times a constant vector) since the ordinary product satisfies the same algebraic rules as a tensor product. Specifically, every formal power series vector field can be written as
, and in fact the tensor product can be identified with the ordinary product (of a field times a constant vector) since the ordinary product satisfies the same algebraic rules as a tensor product. Specifically, every formal power series vector field can be written as

where the  are the standard basis vectors of
are the standard basis vectors of . Next, the Lie derivative
. Next, the Lie derivative  can be expressed as the tensor product of
can be expressed as the tensor product of  and
and , that is
, that is  . Under the identification of
. Under the identification of  with ordinary product, this means
with ordinary product, this means
 , where
, where 
and  in agreement with the following calculation, in which
in agreement with the following calculation, in which  because
because  is constant.
is constant.

This kind of calculation also shows that  representation (on vector fields ) with triad
representation (on vector fields ) with triad  is the tensor product of the representation (on scalar fields)
is the tensor product of the representation (on scalar fields)
with triad  and the representation (on
and the representation (on 
with triad  that is
that is

It follows that a basis from the normal form space  is given by well defined transvectants
is given by well defined transvectants 
as  ranges over a basis for
ranges over a basis for 
and  ranges over a basis for
ranges over a basis for . The first of these bases is given by the standard monomials of a Stanley decomposition for
. The first of these bases is given by the standard monomials of a Stanley decomposition for . The second is given by the standard basis vectors
. The second is given by the standard basis vectors  such that
such that  is the index of the bottom row of a Jordan block in
is the index of the bottom row of a Jordan block in . It is useful to note that the weight of such an
. It is useful to note that the weight of such an  is one less than the size of the block. Then we define the transvectant
is one less than the size of the block. Then we define the transvectant  as
as

From here, the computational procedures of box products are the same as those used in describing rings of invariants from [4], except that infinite iterations never arise.
4. Normal Form for Systems with Linear Part N3(n)
Before generalizing we shall consider the normal form for nonlinear systems with linear part having two and three blocks, that is  and
and  as examples.
as examples.
4.1. System with Linear Part N33
The Stanley decomposition for the ring of invariants with linear part  is given by:
is given by:

(see [6]). Since  and
and  has weight zero, it is convenient to remove them since we do not expand along terms of weight zero by setting
has weight zero, it is convenient to remove them since we do not expand along terms of weight zero by setting  and write
and write

In this case the basis elements are  and
and . Therefore we need to compute the box product of the ring
. Therefore we need to compute the box product of the ring  with
with  which are both of weight 2.
which are both of weight 2.
Therefore . Distributing the box product there are two cases to consider.
. Distributing the box product there are two cases to consider.
Case 1:
 .
.
There are four products namely:
a) 
b) 
c) 
d) 
Recombining terms gives

Case 2: Similarly we have,

Adding terms in case 1 and 2 we obtain:
Finally, to complete the calculation, it is necessary to compute the transvectants that appear. These are of the form  and
and  for
for  where
where .
.


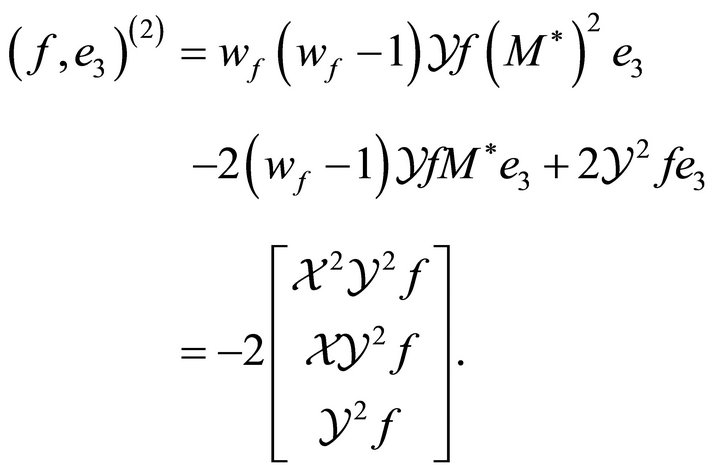
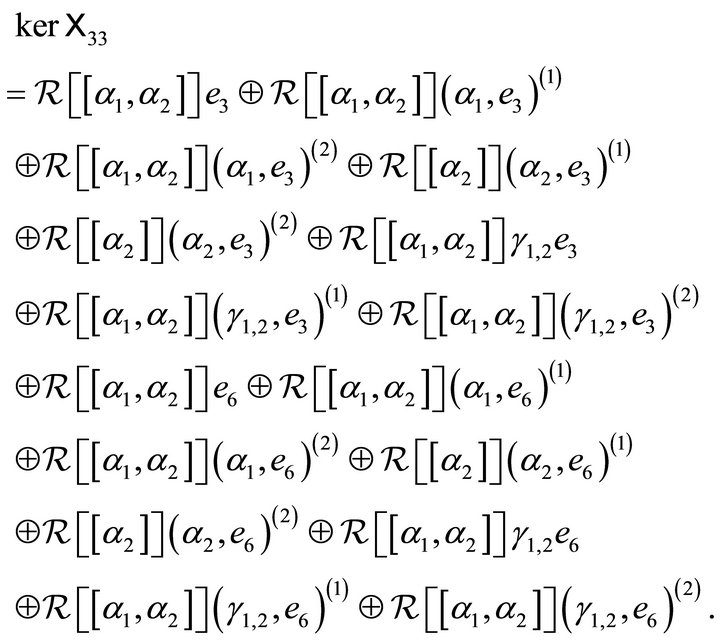
We ignore the nonzero constants –1 and –2 because we are concerned with computing basis elements. For the basis  we have:
we have:

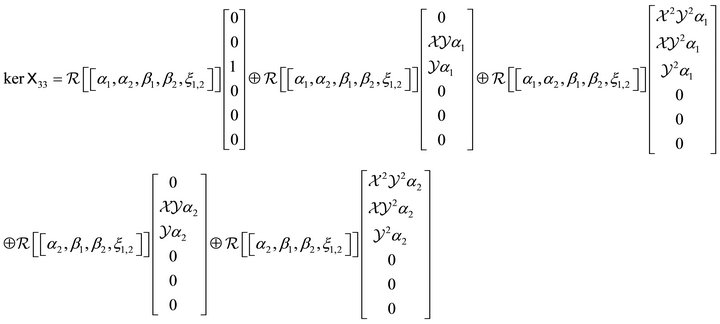
Therefore the normal form for system with linear part  is:
is:

4.2. System with Linear Part N333
The Stanley decomposition for ring of invariants of a system with linear part  is given by:
is given by:
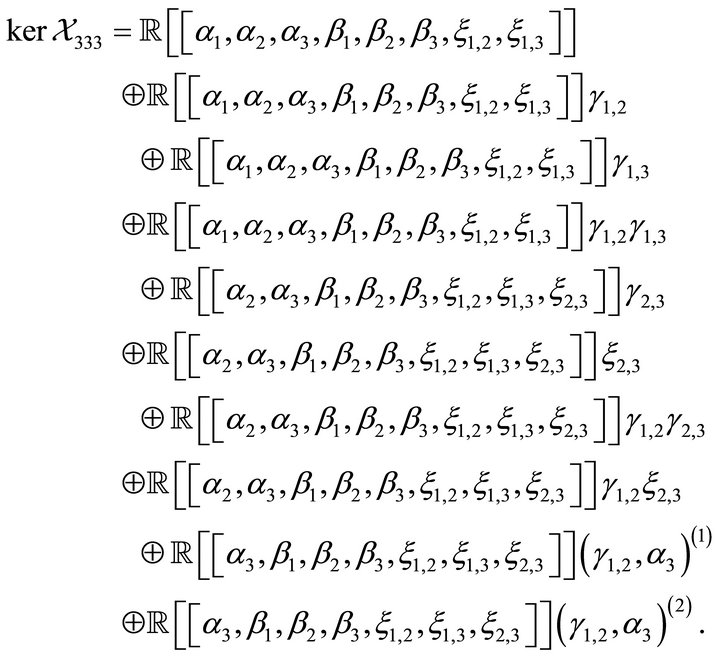
(see [6]).
The basis elements for  are
are  and
and . Therefore we need to compute the box product of the invariants ring
. Therefore we need to compute the box product of the invariants ring  with
with . Thus
. Thus  Let
Let
 , then
, then
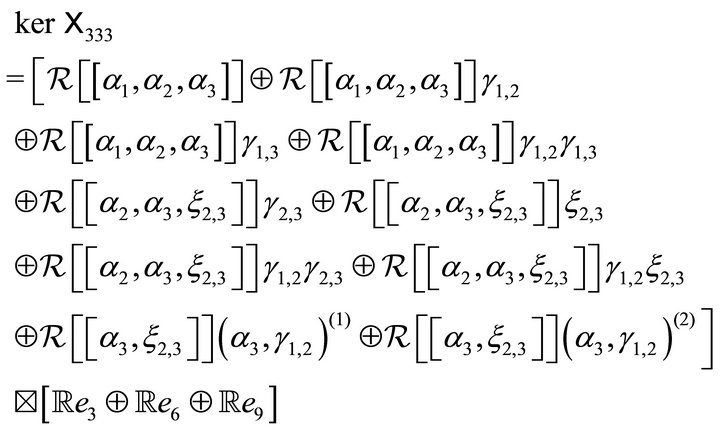
There are three cases to consider. Computing and simplifying the cases we obtain the normal form as:
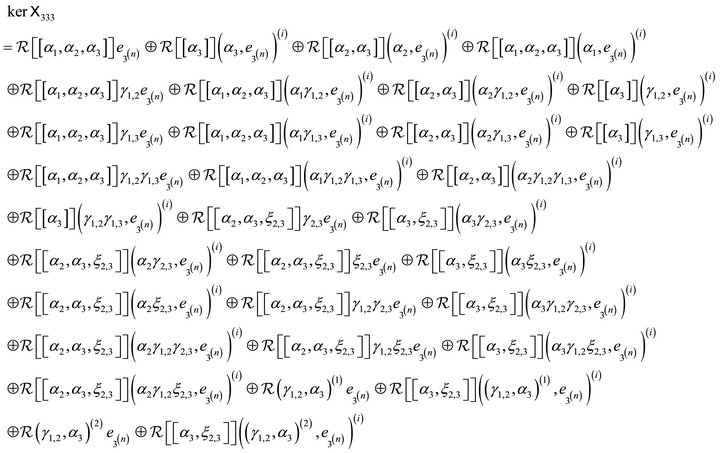
where  and
and  such that
such that ,
,
 and
and 
In general, from the above examples we conclude that the normal forms are obtained by computing the box product
The basis of the normal form of  are transvectants of the form:
are transvectants of the form:  where
where  is the standard monomials of Stanley decomposition of the ring of invariants,
is the standard monomials of Stanley decomposition of the ring of invariants,  ,
,  and
and .
.
As an example we find the normal form for a system with linear part , we first find the ring of invariants
, we first find the ring of invariants
 where
where  using
using . By inspection
. By inspection  and
and , and this generates the entire ring; that is
, and this generates the entire ring; that is
 (4.1)
(4.1)
To check this, we note that the weight of  is two and
is two and  is of weight zero, so the table function of
is of weight zero, so the table function of  is
is

Hence

this implies (0.1).
The next step is to compute  as a module over
as a module over .
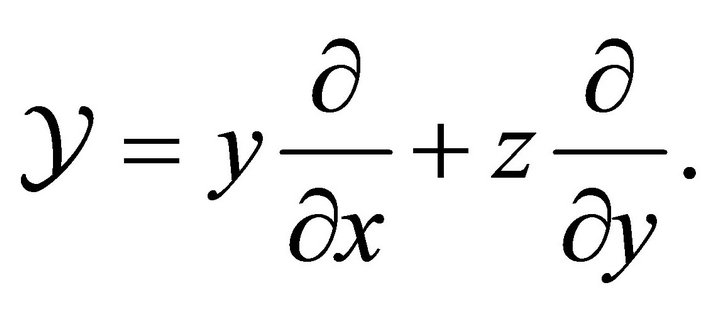
.  contains one Jordan block of size 3 hence the differential operators
contains one Jordan block of size 3 hence the differential operators

In this case the basis elements is  which is of weight 2 therefore the normal form is
which is of weight 2 therefore the normal form is


We compute:



The differential equations in  normal form are:
normal form are:


The normal form upto quadratic term is:

Remark: The normal form of a dynamical systems is a powerful tool in the study of stability and bifurcations analysis. From the practical point of view, only the normal form with perturbation (bifurcation) parameters is useful in analyzing physical or engineering problems. In this paper the computation of the normal form has been mainly restricted to systems which do not contain perturbation parameters by setting the parameters to zero to obtain the simplified normal form. Having found the normal form of the reduced system we shall then add unfolding terms to get a parametric normal form for bifurcation analysis.
NOTES