Numerical Approach of Network Problems in Optimal Mass Transportation ()
1. Introduction
In this paper we present some models of urban planning. These models are examples of applications in mass transportation theory. They describe how to optimize the design of urban structures and their management under realistic assumptions. The paper is organized as follows: in Section 2 we present at first some urban planning models and preliminaries. The Section 3 is devoted to the approximation of the models; and numerical simulations that are our main results. Finally, summary and conclusions are presented in Section 4.
2. Preliminaries and Mathematical Modeling
Given two distributions  and
and  on
on  with equal total mass, the classical generic Monge transportation problem consists in finding among all the maps
with equal total mass, the classical generic Monge transportation problem consists in finding among all the maps  verifying
verifying  for any measurable set in
for any measurable set in , those which solve the minimization problem:
, those which solve the minimization problem:

These maps are said to be transportation maps; they transport a measure  (quantity) to a measure
(quantity) to a measure .
.
For the existence of solutions, we recommend to see [6-10]. We invite the reader to see the books written in this topic by Villani [11,12] for additional information. In particularly Sudakov have studied in [13] the existence of optimal map transportation when  and
and  is absolutely continuous with respect to the Lebesgue measure
is absolutely continuous with respect to the Lebesgue measure .
.
For studying the many cases where the Monge transportation problem doesn’t give a solution, Kantorovich considered the relaxed version of the Monge problem. In this framework, the transportation problem consists in finding among all admissible measures  having
having  and
and  as marginals, those which solve the minimization problem
as marginals, those which solve the minimization problem

The meaning of the following expressions  and
and  is explained respectively as follows:
is explained respectively as follows:
 and
and  for any measurable subset
for any measurable subset  of
of .
.
The Monge-Kantorovich problem obtained, depends only on the two distributions  and
and , and the cost
, and the cost  which may be a function of the path connecting
which may be a function of the path connecting  to
to .
.
When the unknowns of the problem are the distributions  and
and , the Monge-Kantorovich mass transportation problemcan be interpreted as an optimal urban design problem. When the unknown is the transportation network, we have an irrigation problem, that is an optimal design of public transportation networks.
, the Monge-Kantorovich mass transportation problemcan be interpreted as an optimal urban design problem. When the unknown is the transportation network, we have an irrigation problem, that is an optimal design of public transportation networks.
We also mention the dynamic formulation of mass transportation given in [4,14,15] and generalized in [16]. In this framework, we consider that:
· the space of measures acting is a time-space domain  where the urban area
where the urban area  is a bounded Lipschitz open subset with outward normal vector
is a bounded Lipschitz open subset with outward normal vector ;
;
· the mass density  at the position
at the position  and time
and time  is a Borel measure supported on
is a Borel measure supported on , i.e.
, i.e. ;
;
· the velocity field  of a particle at
of a particle at  is a Borel vectorial measures supported on
is a Borel vectorial measures supported on ;
;
· the velocity field  of the flow at
of the flow at  is a Borel vectorial measures supported on
is a Borel vectorial measures supported on 

 and defined by
and defined by  .
.
The Monge-Kantorovich mass transportation problem consists in solving the following optimization problem:
 (1)
(1)
with the constraints:
 (2)
(2)
where  is an integral functional on the
is an integral functional on the  -valued measures defined on
-valued measures defined on . Note that (2) is the continuity equation of our mass transportation model.
. Note that (2) is the continuity equation of our mass transportation model.
2.1. Optimal Urban Design
In the models of optimal design of an urban area we considered that
· the urban area  is a well known regular compact subset of
is a well known regular compact subset of ;
;
· the total population and the total production are fixed data of the problem;
· only the density of residents  and the density of services
and the density of services  are unknowns data of the problem.
are unknowns data of the problem.
The aim is to find the density of residents  and the density of services
and the density of services  minimizing the transportation cost.
minimizing the transportation cost.
Principally there are two models for studying the optimal urban design. The first one takes into account the following facts:
· there is a transportation cost for moving from the residential areas to the services poles;
· people do not desire to live in areas where the density of population is too high;
· services need to be concentrated as much as possible, in order to increase efficiency and decrease management costs.
The transportation cost will be described through a Monge-Kantorovich mass transportation model.
In particularly, we will take it as the  -Wasserstein distance defined by:
-Wasserstein distance defined by:
Taking into account the total unhappiness of residents due to high density of population, we define a penalization functional of the form

where  is the density of the population,
is the density of the population,  is supposed to be convex, null at the origin and super linear (that is
is supposed to be convex, null at the origin and super linear (that is  as
as ). The increasing and diverging function
). The increasing and diverging function  represents the unhappiness to live in an area with population density
represents the unhappiness to live in an area with population density .
.
Thus we define a functional  which penalizes sparse services. This functional is of the form:
which penalizes sparse services. This functional is of the form:

where  is supposed to be concavenull with infinite slope at the origin (i.e.
is supposed to be concavenull with infinite slope at the origin (i.e.  as
as  ). Every single term
). Every single term  in the sum above represents the cost for building and managing a service pole of size
in the sum above represents the cost for building and managing a service pole of size  located at the point
located at the point  of
of . The Report
. The Report  is the productivity of pole of size
is the productivity of pole of size .
.
So in the first model, the optimal urban design problem becomes the following optimization problem:
 (3)
(3)
In the second model the population transportation is considered as a flow, that is a vector field . The equilibrium condition is achieved when the emerging flow is the excess of the demand in
. The equilibrium condition is achieved when the emerging flow is the excess of the demand in , i.e.
, i.e.

In order to take into account the congestion effects, we suppose that the transportation cost  per resident at the point
per resident at the point  depends on the traffic intensity at
depends on the traffic intensity at , i.e.
, i.e.

where  is an increasing function.
is an increasing function.
Then, the transportation cost moving  to
to  is:
is:

The problem (1) with the constraints (2) allows both to take into account the congestion effects by an appropriated choice of the functionals  and to widen the choice of unhappiness function
and to widen the choice of unhappiness function  and management cost function
and management cost function  of the first model to the local lower semicontinuous functionals on
of the first model to the local lower semicontinuous functionals on .
.
For more details, we refer the interested reader to the several recent papers on the subject (see for instance [4, 14-17]).
2.2. Network Problems Applied to the Urban Transportation
In the models of optimal design of an urban area we considered that
· the urban area  is a well known regular compact subset of
is a well known regular compact subset of ;
;
· the density of residents  and the density of services
and the density of services  are two well known positives measures with equal mass.
are two well known positives measures with equal mass.
The irrigation problem consists to find among all feasible structures (or feasible network)  those that minimize the transportation cost
those that minimize the transportation cost

The particular irrigation problem of the average distance consists to find an optimal network  for which the average distance for a citizen to reach the mos
for which the average distance for a citizen to reach the mos  t nearby point of the network is minimal.
t nearby point of the network is minimal.

Theorem 1 For every  there exists an optimal network
there exists an optimal network  for the Optimization problem
for the Optimization problem

where  is the Hausdorff measure defined on
is the Hausdorff measure defined on .
.
Notice that there are other proposition of functionals to be minimized.
For more details, we refer the interested reader to the several recent papers on the subject (see for instance [1-3, 18,19]).
Our aim is to concentrate our effort on the numerical questions to locate the optimal network in a given domain  says for example a town.
says for example a town.
3. Approximation and Numerical Simulations
3.1. First Steps for the Formulation of the Discrete Problem
In this subsection, we are going to propose a first approach of discretization. From this, we deduce a generalized formulation but not the own possible formulation.
Let

For the simulation we are going to consider:
·  and
and ;
;
·  such that
such that ;
;
· a sequence of points  and of balls
and of balls  such that
such that
 , with
, with
 , and
, and .
.
and let  and
and . We build an other map
. We build an other map  switching round cyclically the images of balls
switching round cyclically the images of balls . Then
. Then  satisfies
satisfies

where  and
and .
.
Then we have , i.e.
, i.e.

Therefore when , we obtain
, we obtain
 (4)
(4)
Suppose that the map  and the measure
and the measure  are regular, the Equation (4) leads
are regular, the Equation (4) leads
 (5)
(5)
Then 
is cyclically monotonous and .
.
At first, in problem ( ) the objective is to find the points
) the objective is to find the points  which minimize
which minimize
 subject to
subject to

In the next section, we show that it is quite possible to give a more general approximation .
3.2. New Reformulation Using Permutations
In the literature, many formulations (see for example [1-4]) have not yet practical applications which deal with the permutation of points. In this paper we introduce a new reformulation of the problem by introducing permutations .
.
Let us take a permutation  defined on
defined on  such that
such that , we set:
, we set:

and we solve the two following problems: ( )
)

subject to

and problem ( )
)

subject to

with the norm  and
and
 .
.
This is a theoretical formulation. And our aim is to apply it to a practical urban transport network. As a first step, we decided to work on  with a reasonable number of points.
with a reasonable number of points.
For a scenario in , if we consider
, if we consider  points: the number of programs to be solved becomes
points: the number of programs to be solved becomes . We leave the reader to verify that for:
. We leave the reader to verify that for:
· m = 3 points  we solve 27 programs
we solve 27 programs
· m = 4 points  we solve 256 programs
we solve 256 programs
· etc.
A scenario involving up to 18 points is used for problem ( ). Using this scenario with problems (
). Using this scenario with problems ( ) and (
) and ( ) requires to solve
) requires to solve  programs, it is the reason we consider only some of these points for permutations in (
programs, it is the reason we consider only some of these points for permutations in ( ) and (
) and ( ).
).
3.3. Numerical Experiments
This section shows how the three models developed in the two previous Sections 3.1 and 3.2 are applied to real data of Dakar Dem Dikk (3D). Recall that 3D (see [20], [21]) is the main public urban transportation company in Dakar. This company manages a fleet of buses with different technical characteristics. Some of the buses can operate only in certain roads in the city center and the others can access in all over the network. Buses are parked overnight at Ouakam and Thiaroye terminals (see Figure 1).
To ensure network coverage, 3D manages its services by using 17 lines, with 11 from Ouakam terminal and 6 from Thiaroye terminal. Each line ensures a certain num-

Figure 1. Urban transportation network of 3D.
ber of routes. At present, the total number of routes in the network is 289. First, the most important 18 sites of the network are identified. Thirty (30) permanent terminuses (terminals) and 810 bus stops are used (see Figure 1, where bus stops are not represented due to their size). The map in Figure 1 is obtained by using the software EMME [22]. Table 1 gives the 18 sites, their latitude and longitude.
The data are based on the scenario of 3D; and the input data needed to use the models are the:
· total length of the network  kilometers;
kilometers;
· number of points  (terminals and bus stops)
(terminals and bus stops)  (see Figure 1);
(see Figure 1);
· latitude and longitude of points  representing the two terminals and bus stops.
representing the two terminals and bus stops.
The total distance covered by all the buses from terminals to starting points of routes and from end points back to their terminals represents the total length of the network; and we have L = 5902.62 kilometers (for the 18 sites).
The GPS (Global Positioning System) coordinates are calculated with Google map, and then transformed into coordinates on the plane with he formula: degree + (minute/60) + (second/3600). Table 1 gives the coordinates of all points.
The numerical experiments are executed:
· on a computer: 2 × Intel(R) Core(TM)2 Duo CPU 2.00 GHz, 4.0 Gb of RAM, under UNIX system;
· and by the software IPOPT (Interior Point OPTimization) 3.9 stable [23,24], running with linear solver ma27.
For the objective function, we have:
with

Finally,

and  is added to the value of the objective function.
is added to the value of the objective function.
Constraint  gives
gives
 .
.
Urban transportation network of 3D Thus,  , i.e.:
, i.e.:
And  gives
gives
 i.e.:
i.e.:

with  and
and .
.
We simply formulate the problem in AMPL [25] syntax, and solve the problem through the AMPL environment; with a total number of 38 variables for problem . The solution obtained is an optimal one (for each case) wherein the priority is assigned to the minimization of the distance between
. The solution obtained is an optimal one (for each case) wherein the priority is assigned to the minimization of the distance between  and
and . The IPOPT found an optimal point within desired tolerances; and we obtain the following results: the total number of iterations is 16 and for the optimal network
. The IPOPT found an optimal point within desired tolerances; and we obtain the following results: the total number of iterations is 16 and for the optimal network  we have
we have
 . The others obtained solutions
. The others obtained solutions ,
,  and
and  are given in Table 2 with the GPS coordinates. The points
are given in Table 2 with the GPS coordinates. The points  and
and  are represented in the network (see Figure 2).
are represented in the network (see Figure 2).
Permutations make the resolution more complicated but can give better results. The number of sub-problems to solve depends on the number of points in the network. Thus, we choose  points in 3D’s network.
points in 3D’s network.
Now, let us take the permutation which is the main idea of this work. For problem ,
,  such that
such that , we have
, we have . Therefore some constraints are similar and we have 9 subproblems to solve. An illustration:
. Therefore some constraints are similar and we have 9 subproblems to solve. An illustration:
The three unconstrained sub-problems are obtained for  with
with , i.e. in the three permutations (1,1,1), (2,2,2) and (3,3,3).
, i.e. in the three permutations (1,1,1), (2,2,2) and (3,3,3).
All sub-problems constraints are reported in Table 3.

Table 2. y1 and ym for optimal network Σopt.

Figure 2. Optimal network of 3D without permutation.

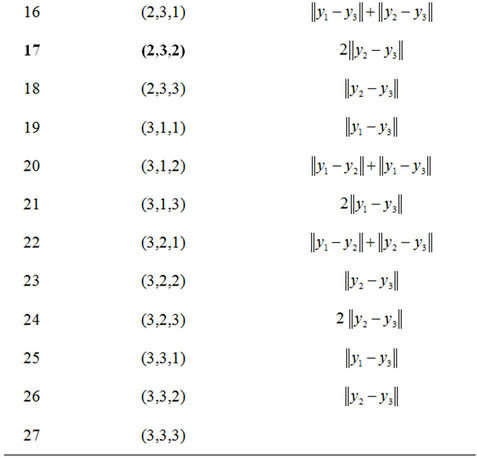
Table 3. All constraints with permutations.
It is sufficient to solve  and
and ; since we have
; since we have ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and .
.
We only compute the quantities ,
,  and
and . For all sub-problems
. For all sub-problems , the objective function is the same as problem
, the objective function is the same as problem  with
with .
.

with
 ,
,

and
 .
.
Finally,
and  is added to the value of the objective function.
is added to the value of the objective function.
From computational results, we have obtained the same value for all 10 sub-problems. Thus, permutations do not influence the distance constraint on the curve of . The optimal value is
. The optimal value is  for all
for all  with
with .
.
For problem , we consider
, we consider  and the number of possible permutation is
and the number of possible permutation is . Recall that the number of sub-problems to solve depends on the number of points in the network. Also, we choose
. Recall that the number of sub-problems to solve depends on the number of points in the network. Also, we choose  points in 3D’s network. Thus, for the considered permutation
points in 3D’s network. Thus, for the considered permutation  we have obtained a total of
we have obtained a total of  sub-problems
sub-problems  to solve, see Table 4.
to solve, see Table 4.
In order not to overload explanations, we develop only the sub-problem , the rest are left to the reader as an exercise.
, the rest are left to the reader as an exercise.
In , the sub-problem
, the sub-problem  is obtained for
is obtained for
 with vectors
with vectors  and
and 
 . For the objective function, we have
. For the objective function, we have


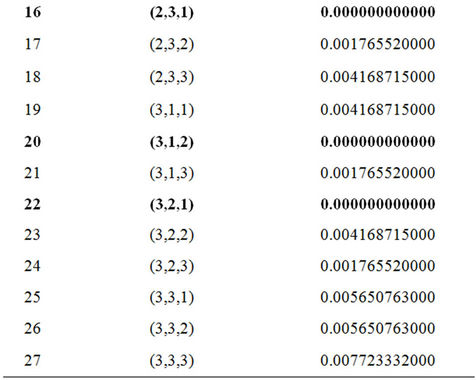
Table 4. Optimal values of αi with different permutations.
with
 ,
,

and

Finally,
and  is added to the value of the objective function for all sub-problems
is added to the value of the objective function for all sub-problems 
The constraint

gives
 i.e.:
i.e.:

For the scenario of problems  and
and , we choose x1 = Ouakam terminal, x2 = Thiaroye terminal and x3 = Leclerc (see Table 5).
, we choose x1 = Ouakam terminal, x2 = Thiaroye terminal and x3 = Leclerc (see Table 5).
We denote by  and
and  the optimal value and the optimal solution of sub-problem
the optimal value and the optimal solution of sub-problem 
 , respectively.
, respectively.
The results show that the following six sub-problems: ,
,  ,
,  ,
,  ,
,  ,
,  give the best value
give the best value  . The six solutions are different, i.e.:
. The six solutions are different, i.e.:
 with only
with only .
.
The curve  can be described by one of the points
can be described by one of the points ; see Figure 3 where
; see Figure 3 where
 .
.
The points  which define
which define  (with coordinates
(with coordinates 
 are given in Table 6, with
are given in Table 6, with .
.
The solutions giving the best possible permutations (optimum) are illustrated in Table 6 and include all permutations .
.
According to the simulations, we determine a set of optimal policy that can describe the optimal network . Finally: after comparison of the simulated models, we can deduce that the model for problem
. Finally: after comparison of the simulated models, we can deduce that the model for problem  is better. It provides the best curve describing the optimal value
is better. It provides the best curve describing the optimal value , obtained with the permutations introduced in the objective function.
, obtained with the permutations introduced in the objective function.
4. Conclusions
In this paper, we describe applications of mass transportation theory and develop how to optimize the curve design of urban network problems. Using the discrete formulations, we give three nonlinear programming problems with continue variables, and have described urban transportation problem of 3D applied to these three models. The results have shown that the optimal network is obtained with permutations including .
.
In future works, we will study an application in  and make a reformulation that solves a unique program,
and make a reformulation that solves a unique program,

Table 5. The network Σopt with permutations.

Table 6. The optimal solutions  with permutations.
with permutations.
5. Acknowledgements
We would like to thank all DSI’s (Division Système d’Information) members of 3D for their time and efforts for providing the data, and discussions related to the meaning of the data.