On the Existence and Uniqueness of Solutions for Nonlinear System Modeling Three-Dimensional Viscous Stratified Flows ()
1. Introduction
The objective of this paper is to study the qualitative properties of the weak solutions of the system of partial differential equations which describes nonlinear motions of stratified three-dimensional viscous fluid in the gravity field, such as existence, uniqueness and smoothness. This model of three-dimensional stratified fluid corresponds to a stationary distribution of the initial density in a homogeneous gravitational field, which is of Boltzmann type and is exponentially decreasing with the growth of the altitude. The results may be applied in the mathematical fluid dynamics modelling real non-linear flows in the Atmosphere and the Ocean.
The additional unknown function (density), as well as the stratification equation itself, constitutes the novelty of the problem. To construct the solutions, we will use the Galerkin method.
We consider a bounded domain  with the boundary of the class
with the boundary of the class  piecewise, and the following system of fluid dynamics
piecewise, and the following system of fluid dynamics
 (1.1)
(1.1)
Here  is the space variable,
is the space variable,  is the velocity field,
is the velocity field,  is the scalar field of the dynamic pressure and
is the scalar field of the dynamic pressure and  is the dynamic density. In this model, the stationary distribution of density is described by the function
is the dynamic density. In this model, the stationary distribution of density is described by the function , where N is a positive constant. The gravitational constant g and the viscosity coefficient
, where N is a positive constant. The gravitational constant g and the viscosity coefficient  are also assumed as strictly positive.
are also assumed as strictly positive.
For linear non-viscous case, Equations (1.1) are deduced, for example, in [1] -[3] . For linear viscous compressible fluid, system 1.1 is deduced, for example, in [4] . The linear system corresponding to 1.1, was studied from various points of view, and some results may be found in [5] -[10] .
There exists, of course, huge bibliography concerning Navier-Stokes system (see, for example, [11] -[14] ).
However, the non-linear system modelling stratified viscous flows have not been studied mathematically yet, and thus our research was motivated by the novelty of the presence of the term  in the third equation of 1.1, and also by the presence of the fourth equation itself.
in the third equation of 1.1, and also by the presence of the fourth equation itself.
2. Construction and Existence of a Weak Solution
We denote  and observe that, without loss of generality we can consider
and observe that, without loss of generality we can consider . In this way, we write Equations (1.1) in the vector form:
. In this way, we write Equations (1.1) in the vector form:
 (1.2)
(1.2)
We associate system 1.2 with the initial conditions
 (1.3)
(1.3)
and the Dirichlet boundary conditions
 . (1.4)
. (1.4)
Let  be a functional space of smooth solenoidal functions with compact support in Ω. We denote as
be a functional space of smooth solenoidal functions with compact support in Ω. We denote as  the closure of
the closure of  in the norm
in the norm . We also denote as
. We also denote as  the space of solenoidal functions from
the space of solenoidal functions from  which satisfy homogeneous Dirichlet condition.
which satisfy homogeneous Dirichlet condition.
Definition 1.
Let
 ,
, .
.
For any pair of vector functions  we denote
we denote .
.
We will call  a weak solution of 1.2-1.4, if the following integral identities hold
a weak solution of 1.2-1.4, if the following integral identities hold
 (1.5)
(1.5)
 (1.6)
(1.6)
for every pair of functions  such that
such that
 ,
,  , and
, and 
We observe that the relations 1.5 - 1.6 are obtained in a natural way after multiplying by  the system 1.2, and integrating by parts over
the system 1.2, and integrating by parts over  for x and over the interval
for x and over the interval  for t. After knowing the functions
for t. After knowing the functions , the function
, the function  can be easily found from 1.2.
can be easily found from 1.2.
Let  be a complete orthonormal system in
be a complete orthonormal system in . We observe that, without loss of generality, it can be chosen as a system of eigenfunctions of Stokes operator (see, for example, [11] [13] [15] ).
. We observe that, without loss of generality, it can be chosen as a system of eigenfunctions of Stokes operator (see, for example, [11] [13] [15] ).
We construct the solutions of 1.2 as Galerkin approximations
 (1.7)
(1.7)
where  are unknown coefficients and
are unknown coefficients and  are obtained as solutions of Cauchy problem
are obtained as solutions of Cauchy problem
 (1.8)
(1.8)
Our primary aim is to determine the existence of  and the resulting properties of the approximations
and the resulting properties of the approximations .
.
If we consider 1.5 for  and
and then, the arbitrary election of
then, the arbitrary election of  will imply the relations
will imply the relations
 (1.9)
(1.9)
We transform now the system 1.9 into an autonomous system of differential equations of the first order with respect to the variables , where the vector field is
, where the vector field is . If we denote
. If we denote
 , then it can be easily seen that the system 1.9 is equivalent to
, then it can be easily seen that the system 1.9 is equivalent to
 , (1.10)
, (1.10)
where
 ,
,
 ,
,
 .
.
After differentiating 1.10, we obtain
 , (1.11)
, (1.11)
where 
We introduce the notation  and thus rewrite 1.11 as
and thus rewrite 1.11 as
 . (1.12)
. (1.12)
Since  is an infinitely differentiable vector field, then, from the theory of ordinary differential equations, we conclude that 1.12 admits a maximal solution in the interval
is an infinitely differentiable vector field, then, from the theory of ordinary differential equations, we conclude that 1.12 admits a maximal solution in the interval .
.
Now, we shall deduce some estimates to prove that  is independent on
is independent on .
.
Lemma 1.
The solutions  of the approximate system 1.9 are defined uniquely by 1.7.
of the approximate system 1.9 are defined uniquely by 1.7.
Additionally, the following estimates are valid. For all  there exists
there exists 
such that 1) 
2)  for all
for all 
3) 
4)  for all
for all 
5)  for all
for all 
6)  for all
for all 
where the positive constants a, b, M and  depend only on the initial data 1.3, the parameter of the system N and the domain
depend only on the initial data 1.3, the parameter of the system N and the domain .
.
Remark.
The values of the constants a, b, M and  are given below in 1.22, 1.28 and 1.29.
are given below in 1.22, 1.28 and 1.29.
Proof.
For  we introduce the following auxiliary real-valued function
we introduce the following auxiliary real-valued function .
.
We observe that
 . (1.13)
. (1.13)
After multiplying each equation of 1.9 by  and summing them with respect to
and summing them with respect to , we obtain
, we obtain
 .
.
In this way, choosing , we have that
, we have that
 . (1.14)
. (1.14)
Therefore,  for all t, and thus
for all t, and thus
 . (1.15)
. (1.15)
In particular, we have . Thus the statement “a)” of the Lemma is proved.
. Thus the statement “a)” of the Lemma is proved.
From 1.14 we obtain that
 (1.16)
(1.16)
which will prove the statement “b)”. Indeed,

Now, differentiating 1.9, we obtain .
.
We multiply the last relations by  and sum them with respect to k:
and sum them with respect to k:
 .
.
Therefore, keeping in mind that , we have
, we have
 . (1.17)
. (1.17)
We would like to estimate the right-hand terms in 1.17. Evidently, from 1.15 we obtain
 (1.18)
(1.18)
We will need the following estimate:
 (1.19)
(1.19)
On the other hand, from the generalized Hölder inequality and the interpolation inequality
 , we can estimate the term
, we can estimate the term
 (1.20)
(1.20)
From the Young inequality with “ε” for ,
,  ,
,  ,
, we obtain
we obtain
 (1.21)
(1.21)
Now, using 1.19 and the inclusion Sobolev inequality , we have
, we have

If we choose  such that
such that , then the last estimate, together with 1.17 and 1.18, implies
, then the last estimate, together with 1.17 and 1.18, implies
 (1.22)
(1.22)
Evidently, from 1.22 we have
 , (1.23)
, (1.23)
from which, after integrating with respect to t, it follows that
 . (1.24)
. (1.24)
Now, to obtain a uniform upper estimate with respect to n for , we only need to prove such estimate for
, we only need to prove such estimate for
 . We remind that the system
. We remind that the system , being formed by eigenfunctions of Stokes operator is orthonor mal in
, being formed by eigenfunctions of Stokes operator is orthonor mal in , and also in
, and also in  with the scalar product
with the scalar product , as well as in
, as well as in  with the scalar product
with the scalar product , where P is an orthogonal projection of
, where P is an orthogonal projection of  onto
onto . From 1.9 we have
. From 1.9 we have
 .
.
Proceeding analogously to 1.17-1.21 and also using Lemma 1 from [11], we obtain
If we choose , then we finally have
, then we finally have
 (1.25)
(1.25)
Now, from the Bessel inequality and the properties
 , (1.26)
, (1.26)
we can express 1.25 as
 (1.27)
(1.27)
In this way, using 1.27 and the evident inequality , we can estimate 1.24 as
, we can estimate 1.24 as
 (1.28)
(1.28)
where .
.
Taking , we assure that
, we assure that  and thus we obtain the result that for all
and thus we obtain the result that for all
 there exists
there exists  such that
such that
 , (1.29)
, (1.29)
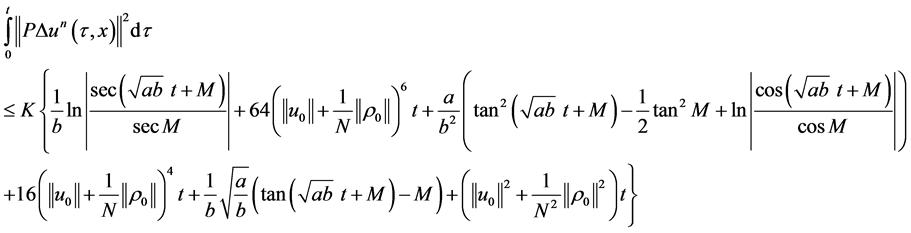
which proves the statement “c)” of the Lemma. It is easy to see that the statement “d)” is a direct consequence of 1.19 and 1.29. The statement “e)” of the Lemma is obtained immediately if we integrate both sides of 1.29 with respect to t. It remains to prove the statement “f)”. For that, we use 1.15 and 1.16 and therefore obtain
 which concludes the proof of the Lemma.
which concludes the proof of the Lemma.
We would like to obtain now more estimates for the approximate solutions  with an intention to show that their limit, which is an obvious candidate for a solution of 1.2 - 1.4, would preserve certain regularity properties of
with an intention to show that their limit, which is an obvious candidate for a solution of 1.2 - 1.4, would preserve certain regularity properties of 
Lemma 2.
For all  and for all
and for all  there exists a constant
there exists a constant  which does not depend on
which does not depend on , such that the following estimate is valid:
, such that the following estimate is valid:

Proof.
We continue using the notation of P as an orthogonal projection of  onto
onto . Let
. Let  be eigenvalues corresponding to the eigenfunctions
be eigenvalues corresponding to the eigenfunctions  of the Stokes operator. We multiply 1.9 by
of the Stokes operator. We multiply 1.9 by  and sum up the resulting equations with respect to
and sum up the resulting equations with respect to . In this way, we have
. In this way, we have
 . (1.31)
. (1.31)
We would like to estimate the following term in 1.31:
 . (1.32)
. (1.32)
By using Cauchy and Hölder inequality, together with the inequality , we obtain
, we obtain
 . (1.33)
. (1.33)
Now we use Sobolev inclusion inequality and Lemma 1 from [11], which allows us to estimate 1.33 as
 (1.34)
(1.34)
We take , consider the inequality
, consider the inequality  and use the property
and use the property
 .
.
Proceeding in this way, we obtain

Now, if we take , we will finally have
, we will finally have
 (1.35)
(1.35)
The term  on the right side of 1.35 can be estimated by 1.29. The terms
on the right side of 1.35 can be estimated by 1.29. The terms , can be estimated analogously, we use the statement “d)” of Lemma 1 and the inequality
, can be estimated analogously, we use the statement “d)” of Lemma 1 and the inequality where we consider p = 2 and p = 3. Now, taking into account the properties
where we consider p = 2 and p = 3. Now, taking into account the properties
 (1.36)
(1.36)
 (1.37)
(1.37)
we can proceed estimating the integral of 1.35 as follows:
(1.38)
We note that the estimate 1.38 is valid for . From 1.28 - 1.29 we have that the value
. From 1.28 - 1.29 we have that the value  is chosen in such a way that the right side of 1.38 is positive. Finally, we use the result from [15] where there is shown that in the functional space
is chosen in such a way that the right side of 1.38 is positive. Finally, we use the result from [15] where there is shown that in the functional space , the norms
, the norms  and
and  are equivalent, which concludes the proof.
are equivalent, which concludes the proof.
Theorem 1.
Let  be a bounded domain with the boundary of the class
be a bounded domain with the boundary of the class , and let
, and let ,
,
 .
.
Then, there exists an interval  and there exist the functions
and there exist the functions  which satisfy the system 1.2 and the conditions 1.3 - 1.4 in sense of 1.5 - 1.6, such that
which satisfy the system 1.2 and the conditions 1.3 - 1.4 in sense of 1.5 - 1.6, such that
Proof.
From Lemma 1 and Lemma 2 we have that there exist a function u and a subsequence of  (which, for brevity, we will denote also as
(which, for brevity, we will denote also as ), such that
), such that
 (1.39)
(1.39)
We note that the inclusion  is compact and continuous, and that
is compact and continuous, and that  is bounded in
is bounded in
 from Lemma 1. On the other hand, from the statement “c)” of Lemma 1 we have that for
from Lemma 1. On the other hand, from the statement “c)” of Lemma 1 we have that for
 and
and , the following estimate holds:
, the following estimate holds:
 (1.40)
(1.40)
In this way, from 1.39, 1.40 and Lemma 24.5 [12], it follows that  belongs to a compact set in
belongs to a compact set in . Therefore, the subsequence in 1.39 can be chosen in such a way that
. Therefore, the subsequence in 1.39 can be chosen in such a way that
 (1.41)
(1.41)
It is easy to see that u satisfies the regularity properties of the Theorem. Indeed, since
 and
and  then, from Theorem IV.5.11 [15] we obtain that
then, from Theorem IV.5.11 [15] we obtain that . Using Sobolev inequality we have the estimate
. Using Sobolev inequality we have the estimate

Therefore, ; which, in turn, implies
; which, in turn, implies . Nowlet us show that u satisfies 1.5. Evidently,
. Nowlet us show that u satisfies 1.5. Evidently,  and
and  satisfy 1.5 for
satisfy 1.5 for
 (1.42)
(1.42)
Since , then
, then

Analogously, we have that  It remains to prove the limit
It remains to prove the limit
 (1.43)
(1.43)
To verify 1.43, we note first that
 (1.44)
(1.44)
We integrate by  the relation 1.44 and use the properties that
the relation 1.44 and use the properties that  is uniformly bounded in
is uniformly bounded in
 and that
and that  In this way, we obtain that 1.43 is valid.
In this way, we obtain that 1.43 is valid.
Now, we pass to the limit for  in
in
 and thus obtain
and thus obtain
 (1.45)
(1.45)
for the functions  from 1.42. Due to the density of the set 1.42, we have that 1.45 is valid for all the functions
from 1.42. Due to the density of the set 1.42, we have that 1.45 is valid for all the functions  from Definition 1, which completes the proof.
from Definition 1, which completes the proof.
2. Uniqueness of the Solutions
Theorem 2.
The weak solution in sense of Definition 1, is unique.
Proof.
Let us exchange  by
by  and thus rewrite the system 1.2 in a more symmetrical way:
and thus rewrite the system 1.2 in a more symmetrical way:
 (2.1)
(2.1)
 (2.2)
(2.2)
Let  and
and  be two solutions of 2.1 - 2.2 which satisfy the conditions 1.3 - 1.4 and also the conditions of Theorem 1. We denote
be two solutions of 2.1 - 2.2 which satisfy the conditions 1.3 - 1.4 and also the conditions of Theorem 1. We denote , and thus obtain
, and thus obtain
 (2.3)
(2.3)
From 2.2 we have . We observe that we can express 2.3 as follows:
. We observe that we can express 2.3 as follows:
 (2.4)
(2.4)
We multiply 2.4 by U, integrate by parts in . In this way, we have
. In this way, we have
 (2.5)
(2.5)
By using the generalized Hölder inequality and Young inequality, together with the inequity
 , we can estimate the last term in 2.5 as
, we can estimate the last term in 2.5 as
 (2.6)
(2.6)
If we take , then we will have the estimate
, then we will have the estimate
 (2.7)
(2.7)
Now we would like to estimate the term . It is easy to see that
. It is easy to see that

In this way, from 2.7 we obtain the estimate
 (2.8)
(2.8)
Now, let us consider the following initial value problem for the function :
:
 (2.9)
(2.9)
Evidently, for continuous  the unique solution of the problem 2.9 is
the unique solution of the problem 2.9 is .
.
By comparison principle, therefore, for every solution of the differential inequality
the property holds:  In this way, we conclude from 2.9 that
In this way, we conclude from 2.9 that , which implies that
, which implies that .
.
Using 2.2 we obtain also that , and thus the theorem is proved.
, and thus the theorem is proved.
Acknowledgements
This research was partially supported by “Fondo de Investigaciones Facultad de Ciencias-Uniandes”.