Solving Systems of Volterra Integral Equations with Cardinal Splines ()
1. Introduction
Integral equations appear in many fields, including dynamic systems, mathematical applications in economics, communication theory, optimization and optimal control systems, biology and population growth, continuum and quantum mechanics, kinetic theory of gases, electricity and magnetism, potential theory, geophysics, etc. Many differential equations with boundary-value can be reformulated as integral equations. One example given in this paper is to use a system of integral equations to solve a third order differential equation. There are also some problems that can be expressed only in terms of integral equations. Scores of papers have appeared on solving integral equations, for examples, cf [2] - [4] .
2. Cardinal Splines with Small Compact Supports
Since the paper [5] by Schoenberg published in 1946, spline functions have been studied by many scholars extensively. Spline functions have excellent features and applications are endless (for examples, cf [6] ). The spline functions on uniform partitions are simple to construct and easy to employ, and are sufficient for a variety of applications.
The starting point is frequently the zero degree polynomial B-spline, an integral iteration formula could be used to construct higher order spline functions with higher degree of smoothness, i.e. let
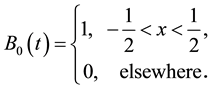
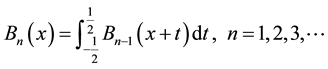 (1)
(1)
 has the global expression
has the global expression 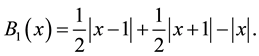
 are called one dimensional B- splines, which are polynomial splines with small compact supports
are called one dimensional B- splines, which are polynomial splines with small compact supports , (i.e.
, (i.e.  for
for ), and excellent traits (cf [6] ). In my previous papers (cf [1] [7] - [10] ), low degree orthonormal
), and excellent traits (cf [6] ). In my previous papers (cf [1] [7] - [10] ), low degree orthonormal
spline and cardinal spline functions with small compact supports were applied in solving the second kind of linear Fredholm and Volterra integral equations.
By cardinal conditions (cf [5] ), we mean, let  be an interpolation function,
be an interpolation function,  be interpolation points, then
be interpolation points, then

The lowest degree continuous cardinal spline is . To achieve higher degree of approximation, we need the cardinal spline functions with higher degree of smoothness. We employ splines that were developed in my previous papers.
. To achieve higher degree of approximation, we need the cardinal spline functions with higher degree of smoothness. We employ splines that were developed in my previous papers.
The cardinal spline  that was originally given in [11] is based on
that was originally given in [11] is based on  from (1) using the similar integral process. Let
from (1) using the similar integral process. Let

Then ![]() satisfies the above cardinal condition when
satisfies the above cardinal condition when ![]() Notice that by the
Notice that by the
construction, ![]()
![]() for
for ![]()
![]() is a polynomial of degree
is a polynomial of degree![]() in each subinterval
in each subinterval ![]() of its support. Furthermore, we acquired nice approximation properties (cf [11] ).
of its support. Furthermore, we acquired nice approximation properties (cf [11] ).
To achieve higher degree of smoothness, we employ ![]() (cf [6] ) and constructed (cf [11] )
(cf [6] ) and constructed (cf [11] )
![]()
It is a simple calculation to check the cardinal condition is satisfied. The ![]() has the same support as
has the same support as![]() , which is
, which is![]() . However, each polynomial in the sub-intervals of
. However, each polynomial in the sub-intervals of ![]() has higher degree than the
has higher degree than the
ones for![]() , Let
, Let ![]() The better approximation properties hold for
The better approximation properties hold for ![]() (cf [11] ).
(cf [11] ).
3. Numerical Methods Solving the System of Volterra Integral Equations
In this and next two sections, we are concentrating on the second kind system of linear Volterra integral equations
![]() (I2)
(I2)
where![]() ,
, ![]()
3.1. Method 1-V for Solving the System of Volterra Integral Equations
As for the Volterra system (I2), we solve it in an interval![]() . Again we let
. Again we let ![]()
![]() Furthermore, plug
Furthermore, plug
![]() (funs 1)
(funs 1)
in (I2), we get
![]()
Let![]() , we arrive at for
, we arrive at for ![]()
![]() (S4)
(S4)
which is a simple system of ![]() S linear equations on the unknowns
S linear equations on the unknowns![]() . For the convergency rate of solution of the Volterra system (I2), we have
. For the convergency rate of solution of the Volterra system (I2), we have
Proposition 1. Given that![]() ,
, ![]() ,
, ![]() and
and ![]() exist and are bounded in
exist and are bounded in![]() ,
,
![]()
![]() and
and ![]() exist and are bounded in
exist and are bounded in![]() . Further
. Further
more ![]() satisfies the condition:
satisfies the condition:
![]()
where![]() . Let
. Let ![]() satisfy the linear system (S1) and
satisfy the linear system (S1) and![]() ; then
; then
![]()
where ![]() is the exact solution of the system of Equation (I1).
is the exact solution of the system of Equation (I1).
The proof is very similar to the proof of the following Proposition 3, so we skip it.
3.2. Method 2-V for Solving the Systems of Volterra Integral Equations
To achieve higher approximation rate, we plug
![]() (funs 2)
(funs 2)
into (I2), where extra function values still follow the conditions (cond1) and arrive at
![]()
Let![]() , By the similar reasons as above, we conclude that
, By the similar reasons as above, we conclude that
![]() (S5)
(S5)
which is still a relatively simple system of linear equations.
Remark If the integral equation (I2) has a unique solution, then the linear system (S5) is consistent. Furthermore
![]()
(where![]() )
)
approximates the solution of the system (I2) with a rate of![]() , similar as in the Preposition 6.
, similar as in the Preposition 6.
Proposition 2. Given that![]() ,
, ![]()
![]() and
and ![]() exist and are bounded in
exist and are bounded in![]() ,
, ![]()
![]() exist and are bounded in
exist and are bounded in![]() . Furthermore,
. Furthermore, ![]() satisfies the condition:
satisfies the condition:
![]()
where![]() . Let
. Let ![]() satisfies the linear system (S2) and
satisfies the linear system (S2) and![]() ,
, ![]() . Let
. Let ![]() then
then
![]()
where ![]() are the exact solution of the Volterra system (I1).
are the exact solution of the Volterra system (I1).
The proof is very similar to the proof of the following Proposition 3, so we skip it.
3.3. Method 3-V for Solving the Systems of Volterra Integral Equations
To achieve higher approximation rate, we let
![]() (funs 3)
(funs 3)
again we plug into (I2), where extra function values still follow the conditions (cond2) cf [9] , and we arrive at
![]()
Let![]() , by the similar reasons as above, we conclude that,
, by the similar reasons as above, we conclude that,
![]() (S6)
(S6)
which is still a relatively simple system of linear equations.
Remark If the integral Equation (I2) has a unique solution, then the linear system (S6) is consistent. Furthermore
![]()
approximates the solution of the integral Equation (I2) with a rate of ![]() as in the following Preposition. Where
as in the following Preposition. Where
![]()
![]()
![]()
Proposition 3. Given that![]() ,
, ![]()
![]() and
and ![]() exist and are bounded in
exist and are bounded in![]() ,
, ![]()
![]() exist and are bounded in
exist and are bounded in![]() . Fur-
. Fur-
thermore, ![]() satisfies the condition:
satisfies the condition:
![]()
where![]() . Let
. Let ![]() satisfies the linear system (S3) and
satisfies the linear system (S3) and
![]()
![]()
![]()
![]()
![]()
Let ![]() then
then
![]()
where ![]() are the exact solution of the Volterra system (I1).
are the exact solution of the Volterra system (I1).
Proof. Let
![]() ,
,
![]()
![]()
where the coefficients are the solutions of above linear system (S3), and
![]()
![]()
![]()
![]() , then
, then
![]() (I1)
(I1)
![]()
Plug in
![]()
Therefore
![]()
4. Numerical Examples
Example 1. Consider![]() ,
,
![]()
Let ![]()
![]()
Apply Method V-1 and solve the linear system, we obtain:
![]()
To achieve higher degree of accuracy, we apply Method V-3 and obtain :
![]()
Compare with the exact solution:
![]()
the error is ![]() for
for![]() .
.
Example 2. Given a system of linear integral equations: for![]() ,
,
![]()
![]()
Let ![]() We apply the Method V-1, where
We apply the Method V-1, where
![]()
![]() are unknown coefficients to be determined. Solve the system of
are unknown coefficients to be determined. Solve the system of ![]() linear equations on unknowns
linear equations on unknowns ![]() obtain
obtain
![]()
and
![]()
Since the solution is ![]() Comparing with the exact solution, the error is
Comparing with the exact solution, the error is ![]() for
for![]() .
.
Example 3. Consider the third order differential equations:
![]() ,
,
with the initial condition: ![]()
Let ![]() then we could transfer the equation to a system of integral equations:
then we could transfer the equation to a system of integral equations:
![]() ,
,
![]() ,
,
![]()
Let ![]()
![]()
![]()
![]()
We apply Method V-2 and solve the linear system and arrive at the solution:
![]()
Since the exact solution is
![]()
Compare with the exact solution, the error![]() .
.
5. Conclusions
The system of first kind of linear Volterra integral equations has the form
![]() (I4)
(I4)
where ![]()
![]()
They can easily be transformed to the system of second kind of linear Fredholm and Volterra integral equations (cf [3] ). We can apply the similar method to solve the first and second kind Fredholm integral systems. So the proposed methods are simple and effective procedures for solving both linear system of Fredholm and Volterra integral equations.
The orthonormal and cardinal splines could also be applied to non-linear integral equations; the resulting system of coefficients will be a non-linear system, which takes more time and effort to solve. The convergence rate could be higher if we apply more complicated orthonormal or cardinal spline functions.
Acknowledgements
The work was partially funded by the National Natural Science Foundation of China under Grant no. 1471093, the Doctoral Program Foundation of the Ministry of Education of China under Grant no. 20110111120026, the Natural Science Foundation of Anhui Province of China under Grant no. 1208085MA15, the Key Project Foundation of Scientific Research, Education Department of Anhui Province under Grant no. KJ2014ZD30.
The authors thank the family members, the colleagues and administrators of the
University
of LaVerne for their encouragement and support on this research.