Some Results for Exact Support Recovery of Block Joint Sparse Matrix via Block Multiple Measurement Vectors Algorithm ()
1. Introduction
Compressed sensing [1] [2] [3] theory is a theoretical method to solve sparse solutions of large underdetermined linear systems, which has received lots of attention in the last decades and it has been applied to many research domains, including signal processing [4] , radar system [5] , medical imaging [6] , image compression [7] and so on. Suppose a signal
, we aim to reconstruct it from linear measurements
(1)
where
is called measurement vector,
denotes a measurement matrix with
, and
is the noise vector. Because the signal
we need to reconstruct is a vector, (1) is named as single measurement vector (SMV) model. Since the solution of (1) is not unique, some additional constraints on
and
are needed to reconstruct
uniquely. What we are interested in is that
is sparse.
is the
norm. When
, we say signal
is K-sparse. To reconstruct such a signal
from noisy model (1), a intuitive idea is to find a solution of
minimization
(2)
where
and
are known. The problem mentioned above is called the SMV problem, and it is also the most common problem model in the field of signal recovery. The optimization problem (2) has a lot of efficient and effective algorithms that use greed strategy to recover
, such as orthogonal matching pursuit (OMP) [8] , stagewise OMP [9] , regularized OMP [10] , compressive sampling matching pursuit [11] , subspace pursuit [12] , generalized OMP (gOMP) [13] , optimized OMP [14] , backtracking-based adaptive OMP [15] , etc. And various researches see [16] [17] [18] .
If the signal we need to recover is not a vector but a matrix
, then model (1) is transformed to multiple measurement vector (MMV) model as follows.
(3)
where
and
.
In many applications, including reconstruction multiband signals [19] and face recognition [20] , the matrix X has a few nonzero rows with blocks, i.e., we call block joint sparse matrix. In terms of how to measure the block joint sparsity, we can use a series of row blocks to present X. As in [21] and [22] , we assume that each block has the same length and is
. Therefore, for rewriting X, we firstly define
for
, where
denotes the i-th row of X. Then, X is represented as:
If there are no more than K blocks
in
, X is a block K-joint sparse matrix. The measurement matrix
can be rewritten as:
where
for
, and
denotes the i-th column of
.
Thus, to reconstruct X, we turn to solve the following optimization problem, which is called MMV problem.
(4)
where the
represents the set of nonzero blocks.
To discuss the performance of the reconstruction algorithm for solving (2), restricted isometry property (RIP) [23] is very common. Then, to study (4), block RIP (bRIP) as a generalization of RIP was proposed in [24] . Particularly, we say that matrix
obeys the bRIP with parameter
if
(5)
for any block K-sparse vectors
. The smallest one among all
meeting (5) is called the block restricted isometry constant (bRIC) of A with order K. For simplicity of writing, throughout this paper, we still use
to represents the bRIC whenever there is no confusion.
Based on the MMV algorithm [25] , Fu et al. firstly proposed a new greedy algorithm in [22] , which is called block MMV (BMMV), to recover the block joint sparse matrices by thinking about block joint sparsity. Simply, the BMMV algorithm is a block multiple measurement vectors version of OMP. For
, we use
to denote the cardinality of
. Let
denote the submatrix of the vector X whose rows indices are restricted to
and the submatrix of
that whose columns indices are only restricted to the set
is denoted by
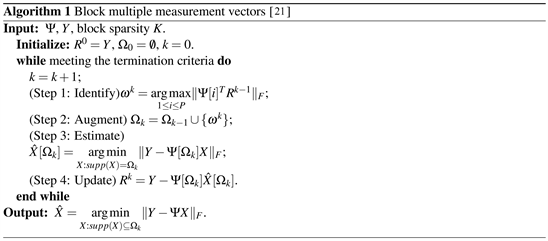
. The BMMV algorithm selects the block index closest to the residual to add to the estimated support at each iteration. The estimated support is used to solve a least square problem to get the estimated original signal. We present the detailed framework of the BMMV algorithm which is described in Algorithm 1.
Like other signal reconstruction algorithms, many results about performance of recovering block MMV problem via BMMV are studied. It is represented in [22] that if
obeys
, then the block K-joint sparse matrices can be accurately reconstructed in K iterations from noiseless model
by BMMV. In [21] , the condition in [22] was improved to
which also is proved to be sharp. As far as we know, there are no researches on support recovery under noisy model (3) with block structure. We complete this part of content that has not yet been studied. It is necessary to study the recovery performance of the BMMV algorithm in noisy case because it is inevitably contaminated by noise in practical applications. Specifically, we firstly prove that if
and
, then the BMMV algorithm can perfectly recover
with stopping criteria
under
. Moreover, our sufficient condition is optimal if noisy model degenerates to noiseless model. Besides, when
and
, the BMMV algorithm turns to the OMP algorithm, and the sufficient condition we mentioned above degenerates to ( [17] , Theorem 1).
2. Preliminaries
2.1. Notation
Let
and
denote the
and Frobenius norm of a vector and matrix, respectively. The zero and identity matrix are denoted by
and I, respectively. The j-th element of vector
is denoted by
. Let
denotes the support of a matrix X with block structure, then
for any matrix X which is block K-joint sparse, where
denote the transpose of
. P as the number of blocks of X is assumed for simplity. Let
represents a set which elements are indexed by
and are not contained in set
for any set
. Similarly, we use
and
represent the complementary of set
and
, respectively. Let
denotes the pseudoinverse of
if the rank of the columns of
is full, where the inverse of a square matrix is represented by
. Therefore, the projector and its orthogonal complement on the columns space of
can be denoted by
and
, respectively.
2.2. Some Useful Lemmas
For proving our subsequent theoretical studies, we first present some useful lemmas for our theoretical analysis.
Lemma 1 ( [26] , Lemma 1) Suppose
obeys both the bRIP of orders
and
, then
with
.
Lemma 2 ( [11] , Proposition 3.1) Suppose
is a set with
and
obeys the bRIP of order K. Then
where
.
Lemma 3 ( [26] , Lemma 2) Let
and
satisfy
. Suppose
obeys
-order bRIP, then
where
.
Lemma 4 ( [27] , Lemma 1) Let
and
. Then
3. Main Results
Lemma 5 is proposed and plays a very important role in the subsequent theoretical proof.
Lemma 5 Let
with
, then
Proof 1 The skill of proof is similar to the results in ([21, Lemma 4, Lemma 5). To prove Lemma 5, we first show that
(6)
By assumption, it is easy to get
,
, and
, then
(i) is because
(7)
and (ii) is from Lemma 4 with
, and
. Thus, (6) holds. So, by (6), we can easily get that
(8)
Let
then, by some sample calculations, we obtain
(9)
(10)
To simplify the notation, for given
, it is necessary to introduce a new matrix
, and the p-th column of Z is defined as
(11)
where
is the p-th column of
. Furthermore, we define
(12)
(13)
(14)
Then
(15)
and
(16)
(17)
Moreover,
(18)
where (iii) is because (12)-(15), (iv) follows from (7), and (v) is from (11). Therefore, for any
, by applying (18), we can get
(19)
and
(20)
By the (19) and (20) are mentioned before, we can have
(21)
where the last equality because of (9). It is not hard to check that
(22)
where (vi) follows Lemma 3 and (12), (vii) is due to (16) and (17), and (viii) is from (10). By (15), (21), (22), and the fact that
, we have
Combining the aforementioned Equation with (8), we obtain
which implies that
Thus, we complete the proof.
Remark 6 Specially, Lemma 5 is a general block version of ( [28] , Theorem 3.2). The main difference between our Lemma 5 and ( [28] , Theorem 3.2) exist in two aspects. First, our model is block version of multiple measurement vectors. Second, the ways of calculating
are different.
Based on the Algorithm 1 and lemmas we presented above, we show our main results in this section. We provide a sufficient guarantee for the exact support recovery of block joint sparse matrices with the BMMV algorithm under the
bounded noise from noisy model (3).
Theorem 7 Consider (3). Assume that
and matrix X is block K-joint sparse. Provided that measurement matrix
obeys the bRIP of order
with
(23)
and X satisfies
(24)
Then based on the stopping criteria
, the BMMV algorithm can accurately recover the
in K iterations.
Proof 2 For proving Theorem 7, there are two points that need to be shown, namely, one is to prove that the BMMV algorithm selects a correct block index from
in each iteration, and the second is that the BMMV algorithm will select all the indices in
in all K iterations. The proof consists of two parts. First, we illustrate that all correct indices are identified in all iteration via BMMV. Second, we show that the process of identifying terminates after it is executed just
iterations. In the first step the mathematical induction method is used. Suppose that in the first
iterations, the BMMV algorithm has selected the correct indices, which means that
and
. Since
, it obviously holds when
. Therefore, we only have to prove that a correct index is selected by the BMMV algorithm at the k-th iteration, i.e.,
.
By the Step 3 and 4 in Algorithm 1, we can obtain that the orthogonal relationship between
and the columns space of
, then we have
for any
, so we get that
. For proving
, by the Step 1 of BMMV, we turn to proof
(25)
By the estimating step of the BMMV algorithm, we obtain
(26)
Then, from Step 4 of the BMMV algorithm and (26),
(27)
where (τ1) is because the definition of
is used, (τ2) is based on
and
, and (τ3) is due to
. Consequently, to show (25), we try to use (27) to obtain the lower and upper bound on the left and right side of (25), separately. For any
and
, by the triangle inequality, it is obtained that
(28)
and
(29)
Therefore, by (28) and (29), to show (25), we only need to prove
(30)
Next, we try to find a lower bound on the left side of (30). Using the inductive assumption
and
. Hence, we obtain
(31)
Since
and
, according to Lemma 5, we obtain
(32)
where (τ4) is due to the assumption of X in this paper and the fact that
and (τ5) is from Lemma 1, (23) and (31). Then, we deduce a upper bound on the right side of (30). There are
and
that make
Hence, we obtain
(33)
where (τ6) is because
is a matrix with two
subvectors and (τ7) are due to Lemma 2 and
(34)
respectively. Based on (32) and (33), (30) holds when
that is,
In addition, by (23), we obtain
. Hence, once (24) is satisfied, a correct index is identified by the BMMV algorithm in each iteration.
Next, the BMMV algorithm needs to be specified to be performed exact
iterations, that equals to prove that we always have
for all
and
. Since only one correct index is selected by the BMMV algorithm at a iteration under (24), by (27) and triangle inequality, for all
, we obtain
where (τ8) is from (34) and Lemma 3, and (τ9) is because of Lemma 1 and (31). Hence, if
(35)
then
for each
. After some transformations, it is easily get
(36)
which is from
and
. Therefore, from (35) and (36), if (24) holds,
for each
, i.e., it does not terminate until the K-th iteration is completed. Likewise, from (27), we have
where (τ10) is due to
. Due to the termination criteria, the BMMV algorithm stops after the K-th iteration. Hence, the BMMV algorithm just executes K iterations. Our proof is complete.
When
, the X turns to a block K-sparse vector
and V turns to a vector
. For block K-sparse vector, there are already many researches on recovery performance of block reconstruction algorithms, for example, block OMP (BOMP) ( [26] [29] ) and block gOMP (BgOMP) ( [30] [31] ).
Corollary 8 Taking
in (3) and Theorem 7. Assume that
and vector
is block K sparse. Provided that measurement matrix
obeys the bRIP of order
with
, and
satisfies
Then based on the stopping criteria
(
is a residual vector), the BMMV algorithm can accurately recover
in K iterations.
Remark 9 The results in the Corollary 8 are consistent with the results of [26] , which is a sharp sufficient condition. However, [29] gives a new analysis for support recovery that is less restrictive for
. For more details, please refer to [29] .
If the length of blocks
, the block K-joint sparse is equivalent to K-row sparse. In [32] gives two theorems to show the bound
is optimal in noiseless case. More details are in [32] , which means the bound based on bRIP we proposed is optimal in the noiseless case.
Corollary 10 Taking
and
in (3) and Theorem 7, X reduces to
, V reduces to
. Assume that
and vector
is K sparse. Provided that measurement matrix
obeys the bRIP of order
with
, and
satisfies
Then based on the stopping criteria
, the BMMV algorithm can accurately recover
in K iterations.
Remark 11 The Corollary 10 is same as ( [17] , Theorem 1), which is a sharp condition. [33] gives a less restrictive bound on
. This means that our result have room for improvement.
4. Conclusions and Future Works
In this paper, studies on the performance of support recovery of block K-joint sparse matrix via the BMMV algorithm from
are analyzed. We obtained that if
satisfies bRIP with
and
, then BMMV can accurately reconstruct the
in K iterations. With the help of ( [32] , Theorem 2), we also show the RIP-based condition is optimal when the problem reduces to SMV problem under the noiseless case.
Because our result about
is not yet optimal. Thus, one of future directions is to continue to refine this result and continue to study theoretical improvement of the related algorithms. Because the block length considered in this paper is a fixed value for simplicity, it is also worth considering that the block length is a variable. Then, the support recovery conditions are theoretical, and how it applies to practical applications is also a question. The BMMV algorithm selects only one index for each iteration, which means that the recovery program will directly fail once a wrong index is added to the estimation support. It is interesting to propose an improved algorithm to solve the problem.