Fast High Order Algorithm for Three-Dimensional Helmholtz Equation Involving Impedance Boundary Condition with Large Wave Numbers ()
1. Introduction
Acoustics is a branch of physics with high application value in military [1] [2] , medical [3] [4] [5] and other fields [6] [7] [8] . After S. A. Schelkunoff introduced the concept of impedance into electromagnetic fields [9] , the concept of impedance was gradually incorporated into various research fields. The impedance boundary condition (IBC), also called Shchukin-Leontovich condition, was first derived by A. N. Shchukin in 1940 [10] . In the same period, a detailed derivation of IBC was published by M. A. Leontovich [11] [12] . Inspired by Leontovich, Ya. L. Alpert first applied IBCs to the practical problems of electromagnetic waves propagation [13] . Since then, an increasing number of problems involving IBCs have been studied. In practical acoustic problems, such as indoor sound insulation [14] [15] [16] and noise control [17] [18] , sound-absorbing materials are fairly common and are usually considered as IBCs [19] . Therefore, impedance boundary conditions are of significance in acoustic engineering analysis and calculation.
To solve the acoustic field with impedance boundary conditions, the finite element method (FEM) and the boundary element method (BEM) have attracted much attention. For the problems of two-dimensional acoustic pressure field with large uncertain-but-bounded parameters, a modified sub-interval perturbation FEM is presented to reduce the dependency phenomenon of parameters, and has a remarkable performance in two-dimensional tube and cavity of a vehicle [20] . In [21] , Xia and Yu proposed an interval perturbation FEM and a modified interval perturbation FEM.
Calculation of three-dimensional acoustic field is more challenging in both accuracy and efficiency. Additionally, when the frequency of acoustic waves is high, these standard mesh methods often exhibit the so-called “pollution effect” [22] . It is also a computational challenge to solve the problems within acceptable error for standard mesh methods. In this case, various numerical methods are presented to reduce the pollution effect [23] [24] [25] . However, these FEM-related methods still need a large amount of computing time and memory to solve the three-dimensional large wavenumber problem. Moreover, the pollution effect caused by the increase of wavenumber has not been completely solved.
For finite difference method [26] [27] , high-order schemes can be obtained by using the topological advantages of structured grids, which reduces the workload of computing area processing. Moreover, in [28] [29] , it is a remarkable fact that fast Fourier transform technique is introduced to solve linear difference systems, which substantially reduce both the time consumption and the memory consumption in calculation process. Nevertheless, there is still a drawback that the algorithms in [28] [29] can only solve Dirichlet boundary value problems or the boundary value problems with Neumann and Dirichlet boundary conditions. This drawback limits the practical application of the algorithms.
In this paper, a high order fast algorithm is proposed to solve the three-dimensional Helmholtz boundary value problems involving impedance boundary condition. By 19-point finite difference stencil, we discretize the Helmholtz equation and the impedance boundary condition to obtain the fourth-order compact difference scheme. Meanwhile, discrete fast Fourier sine transform is used to simplify the linear systems to be solved. Furthermore, we apply the parallel techniques in programming to accelerate the calculation process.
The outline of this paper is as follows. The model studied in this paper is introduced in Section 2. Fourth-order compact schemes of three-dimensional Helmholtz equation and discretization of impedance boundary condition are derived in Section 3 and Section 4, respectively. In Section 5, a fast algorithm with forth-order convergence is developed based on fast Fourier sine transform and Gaussian elimination. In Section 6, we present three numerical experiments to illustrate the performance of the algorithm. Several conclusions are finally drawn in Section 7.
2. Model Problem
Assuming the propagation of small amplitude acoustic wave is in a homogeneous ideal fluid, the wave equation in three-dimensional space is described as
(1)
where p denotes the pressure of acoustic wave and c is the velocity of sound. The function of pressure p is given by
(2)
where
denotes the real parts and
represents the complex time harmonic pressure.
is the angular frequency (rad/s) and
is imaginary unit. Separating the variables of Equation (1) to obtain the time-independent form, the spatial distribution of acoustic pressure satisfies the Helmholtz equation
with appropriate boundary conditions, where
denotes the Laplace operator and
is the acoustic wave number given by
.
Without loss of generality, the problem studied in this paper is a Helmholtz boundary value problem in a three-dimensional continuous convex doman
. The boundary conditions on
are mixed, involving a general impedance boundary condition on
and a Dirichlet boundary on
. The model problem can be described as follows
(3a)
(3b)
(3c)
where
,
and
are known functions.
is the unit outward normal to
, and
represents the gradient operator.
denotes the relative surface admittance coefficient of sturctural damping. Generally,
is a function of frequency and position.
If
in Equation (3b), the boundary condition on
is called sound soft boundary. In Equation (3c), function g on the right side represents the flow across
. Different from radiation problems, the sound source term g is set to zero in acoustic scattering problems. Additionally, the Neumann boundary condition is obtained if the value of
is set to 0. Furthermore, the boundary
is sound hard or acoustically rigid in the case of
. If the valve of f, b and g are identically zero, and
is set to non-zero, this model is degenerate into the steady-state acoustic pressure field oscillations involving an impedance boundary condition as follows.
3. Discretization of There-Dimensional Helmholtz Equation
We assume that the domain of propagation
is cubic, and
is the upper surface. The domain
is divided into a uniform partition in steps
,
and
along the axes.
denotes the set of grids, where M, N and K are the numbers of internal grids in each directions. Figure 1 illustrates the geometric structure of the model problem (3) and the 19-points finite difference stencil. In Figure 1, the central point is marked red. Blue and black represent all face-centered and all edge-centered points, respectively.
Without losing generality, equal step size
is taken on each axes. Approximated by fourth-order Taylor series expansion at
, we can derive
(4)
where
is the second-order partial derivative of
with respect to x, and
denotes the standard second-order central difference operator in the x-direction.
is the solution of
at Let
. The approximation of
and
can be derived in the same way, i.e.
![]()
Figure 1. The geometric structure of the model problem and the 19-points finite difference stencil.
(5)
where
(6)
Combining Equations (3a), (4), (5) and (6), the compact fourth-order difference scheme for Helmholtz equation is obtained as follows
(7)
where
The truncation error of Equation (7) is
(8)
Note that
should be substituted by
, if f is not second-order differentiable. Multiplying
on the both sides and substituting
in Equation (6), Equation (7) can be rewritten as
(9)
where
(10)
For convenience, we introduce the tridiagonal Toeplitz matrix
. Thus, Equation (7) can be written in the matrix form as
(11)
Here the symbol
denotes the Kronecker product. The sizes of
,
and
are
,
,
, respectively.
,
,
are identity matrices, and
and
are the boundary parts not included in Ψ and F, respectively. In details, we can derive
(12)
where
(13)
For
, it is divided into edge part
and surface part
as
(14)
and
(15)
where
is discrete value of solution on the impedance boundary
. Since the function
is known, the solution of
on
can be replaced. Moreover, we can rewrite Equation (11) as follows
(16)
where
.
4. Discretization of Impedance Boundary Condition
To obtain the fourth-order difference approximation with Taylor series expansion, we discrete the impedance boundary condition in Equation (3c). The left term can be written as
(17)
where
is the ghost points outside the model domain
. Taking the partial derivatives of z on both sides of Helmholtz Equation (Equation (3a)), we can obtain the third-order partial derivative as follows
(18)
Further, Equation (18) can be approximated as
(19)
After substitution of (17) and (19) into (3c), the expression is given by
(20)
Similarly, the matrix form of Equation (20) is obtained as follows
(21)
where
We denote
, and
is invertible if the h is small enough. Thus, we have
(22)
Replacing k in Equation (9) with
, we have
(23)
and the matrix form as follows
(24)
Denoting
and substituting Equation (22) into Equation (24), we have
(25)
5. Fast Algorithm Based on Discrete Fourier Sine Transform
Combining Equation (16) and (25), the linear system is obtained from the compact fourth-order difference schemes as follows
(26)
Here
To reduce the computational complexity and accelerate the speed of solving the linear system, the Fourier sine transform (FST) is applied to improve the algorithm. The discrete Fourier sine transform matrix can be expressed as
(27)
and
satisfies
, where M represents the size of matrices. A typical discrete FST is shown as follows
(28)
where
,
. Replacing M in Equation (28) with N, the definitions of
and
can be obtained in the same way.
Multiplying
on both sides of Equation (25), the following equation can be obtained
(29)
where
Apparently, the linear system expressed in Equation (29) is diagonal and has good properties for solving.
For Equation (16), the discrete FST is applied similarly. Thus, we have
(30)
where
Since the existence of
making Equation (30) still a block tridiagonal system, we consider introducing LU-decomposition to simplify the process of solution. Firstly, we rewrite Equation (30) to its equivalent form as follows
(31)
Let
denote the LU-decomposition of the symmetric tridiagonal matrix. Obviously,
is a
invertible matrix. Multiplying
on both sides, Equation (31) can be written as
(32)
Secondly, the forward Gaussian elimination is adopted to solve Equation (32). For arbitrary positive integer
and
, we extract the last equation of Equation (32), and the following equations can be derived
(33)
Here
is the last elements of
.
and
denote
and the right-hand term of the last equation of Equation (32), respectively. On this basis, we stack Equation (33) according to i and j, so we obtain the equations as follows
(34)
where
,
, and
. Combining Equations (29) and (34), we have
(35)
Notice that all coefficient matrices in Equations (29) and (34) are diagonal and invertible. Using Gaussian elimination, the solution of
on
can be get, i.e.
(36)
Substituting
into Equation (30), the original large block tridiagonal linear system is reduced to
(37)
Thus,
can be obtained by substituting
into Equation (32), which is equivalent to solving Equation (37) directly. Finally, by multiplying
on the left side of
, the numerical solution of the model problem in Equation (3) is obtained. Moreover, we can get
by multiplying
.
We notice that the calculation process of
via Equation (32) is independent of i and j. Meanwhile, due to the feature of coefficient matrix and the sequence of components of
,
can be calculated separately with respect to k. Therefore, the steps computing
and
can be processed in parallel. To summarize, Algorithm 1 demonstrates the steps of this fast algorithm.
6. Numerical Experiments
In this section, three numerical experiments with different coefficient
are presented to demonstrate the validity, efficiency and applicability of the fast algorithm for Helmholtz impedance boundary value problem. We consider numerical experiments in the three-dimensional domain
. All experiments are performed using MATLAB, and the BiCG method is adopted to solve the equations.
To test the performance of the fast algorithm, we offer the time of computing
from
, error in
and
-norms. The definitions of error in
and
-norms are as follows
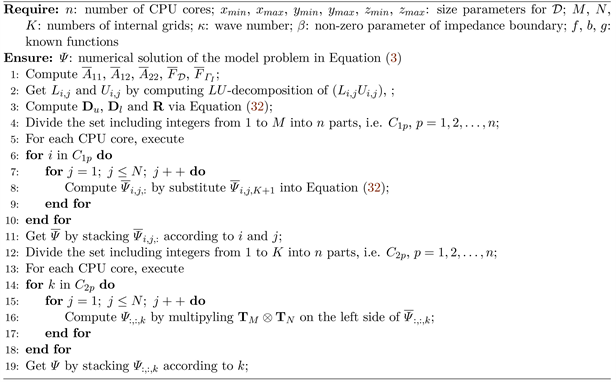
Algorithm 1. Fast algorithm based on discrete Fourier sine transform.
where
and
are the exact solution and the numerical solution, respectively. Notice that
should be
due to the size of
. The convergence order of the algorithm is defined as
(38)
where
represents the labels of different step size.
6.1. Example with
This example tests the performance of the algorithm. When
, the impedance boundary condition has the most general form. For the model problem (3) which has the exact solution
(39)
the model problem (3) can be derived as
(40)
The computational errors, the time and memory consumption for different M are indicated in Table 1. With fewer grid points used (
), the computational error between the numerical solution and the exact solution is only 10−7.
![]()
Table 1. Error, convergence rate, the time and memory consumption with
and
.
The convergence rate is calculated according to Equation (38) and is proved to be up to the fourth-order in
and
-norms. Moreover, the time and memory consumption are acceptable when the space complexity is
. Figure 2 demonstrates the real part and imaginary part of numerical solution
. It can be seen that the imaginary part of the numerical solution appears mainly on the impedance boundary.
6.2. Example with
When
, the impedance boundary condition is simplified to Neumann boundary condition. In this case, the model problem (3) with the exact solution
in Equation (39) becomes the following
(41)
The convergence rate and some measures of the algorithm’s performance are shown in Table 2. With the Neumann boundary condition, the fast algorithm proposed in this paper still reach the convergence rate of the fourth order. Due to the simplification of the boundary conditions, the memory consumption and the time consumption of solving
have fallen by almost half compared with the case
. The numerical solution and the error
are given in Figure 3. Since
, both the numerical and exact solutions are real numbers. When
and
, the error is only 10−10, which shows that the algorithm also has good applicability to Neumann boundary condition.
6.3. Example with
The case of large wave numbers (or high frequency) is always a challenge for
![]()
Figure 2. Numerical solution
with
and
: Real part (left). Imaginary part (right).
![]()
Figure 3. Numerical solution
(left) and error (right) with
and
.
![]()
Table 2. Error, convergence rate, the time and memory consumption with
and
.
solving Helmholtz boundary value problem. In this example, we consider the model problem (3) when
and
. With exact solution in Equation (39), the model problem can easily be derived. Assuming the velocity of sound wave is
, so the frequency is
, 5270 Hz and 10,710 Hz, respectively. Figure 4 illustrates the fitting lines between
and step h when
. The slopes of the fitting lines represent the convergence rate according to Equation (38) and are 4.295 and 4.273, respectively.
When
and
, the error of the numerical solution are plotted in Figures 5-7, respectively. It can be found that the Helmholtz equation is highly oscillatory with large wave numbers. With the wave number increasing, the error of both real part and imaginary part also increases, but it is still in the acceptable range. Furthermore, though the numerical solution has strong oscillation, the boundary between wave and wave is very clear. It shows that the algorithm has high resistance to “Pollution effect” in the case of large wave numbers.
![]()
Figure 4. log-log graph of
and
with
(i.e.
).
![]()
Figure 5. Error
with
and
: Real part (left). Imaginary part (right).
![]()
Figure 6. Error
with
and
: Real part (left). Imaginary part (right).
![]()
Figure 7. Error
with
and
: Real part (left). Imaginary part (right).
7. Conclusions and Suggestions
A fast high-order algorithm based on compact finite difference schemes is purposed to solve three-dimensional Helmholtz impedance boundary value problems. By using the discrete Fourier sine transform and forward Gaussian elimination, the large block tridiagonal linear systems derived from the original model problem is reduced to several independent smaller systems. Moreover, according to the arrangement format of the coefficient matrix, we parallelize the calculation program to further reduce the time consumption.
Numerical examples with impedance and Neumann boundary conditions are considered to verify the effectiveness and accuracy of the algorithm. Results dedicate that the algorithm achieves fourth-order convergence rate in
and
-norms, and consumes less time and memory. It has certain application and popularization value in engineering practice.
In the future, higher-order compact difference schemes can be derived for the three-dimensional Helmholtz boundary value problems with more complex boundary conditions, e.g. electromagnetic scattering and seismology. In that case, the algorithm can be modified and adopted to reduce the consumption of solving, including time cost and memory cost.
Acknowledgements
This research was funded by Fundamental Research Funds for the Central Universities (No.2021MS115).