Applied Mathematics
Vol.06 No.10(2015), Article ID:59834,13 pages
10.4236/am.2015.610156
Itô Formula for Integral Processes Related to Space-Time Lévy Noise
Raluca M. Balan*, Cheikh B. Ndongo
Department of Mathematics and Statistics, University of Ottawa, Ottawa, Canada
Email: *rbalan@uottawa.ca, cndon072@uottawa.ca
Copyright © 2015 by authors and Scientific Research Publishing Inc.
This work is licensed under the Creative Commons Attribution International License (CC BY).
http://creativecommons.org/licenses/by/4.0/



Received 25 April 2015; accepted 20 September 2015; published 23 September 2015
ABSTRACT
In this article, we give a new proof of the Itô formula for some integral processes related to the space-time Lévy noise introduced in [1] [2] as an alternative for the Gaussian white noise perturbing an SPDE. We discuss two applications of this result, which are useful in the study of SPDEs driven by a space-time Lévy noise with finite variance: a maximal inequality for the p-th moment of the stochastic integral, and the Itô representation theorem leading to a chaos expansion similar to the Gaussian case.
Keywords:
Lévy Processes, Poisson Random Measure, Stochastic Integral, Itô Formula, Itô Representation Theorem

1. Introduction
Random processes indexed by sets in the space-time domain are useful objects in stochastic analysis, since they can be viewed as mathematical models for the noise perturbing a stochastic partial differential equation (SPDE). In the recent years, a lot of effort has been dedicated to studying the behaviour of the solution of basic equations (like the heat or wave equations), driven by a Gaussian white noise. This type of noise was introduced by Walsh in [3] and is defined as a zero-mean Gaussian process , with covariance
, with covariance
 , where
, where
 denotes the Lebesgue measure and
denotes the Lebesgue measure and
 is the class of bounded
is the class of bounded
Borel sets in .
.
In the recent articles [1] [2] , a new process has been introduced as an alternative for the Gaussian white noise perturbing an SPDE, which has a structure similar to a Lévy process. We introduce briefly the definition of this process below.
Let N be a Poisson random measure (PRM) on
 of intensity
of intensity
 where
where
 and
and
 is a Lévy measure on
is a Lévy measure on :
:

We denote by
 the compensated PRM defined by
the compensated PRM defined by
 for any Borel set A in
for any Borel set A in
 with
with . The Lévy-type noise process mentioned above is defined as
. The Lévy-type noise process mentioned above is defined as , where
, where

for some . It was shown in [2] that Z is an “independently scattered random measure” (in the sense of [4] ) with characteristic function:
. It was shown in [2] that Z is an “independently scattered random measure” (in the sense of [4] ) with characteristic function:

(In particular, Z can be an a-stable random measure with , as in Definition 3.3.1 of [5] .) One can define the stochastic integral of a process
, as in Definition 3.3.1 of [5] .) One can define the stochastic integral of a process
 with respect to Z and for a certain integrands,
with respect to Z and for a certain integrands,

The stochastic integral with respect to
 (or N) can be defined using classical methods (see e.g. [6] ). We review briefly this definition here.
(or N) can be defined using classical methods (see e.g. [6] ). We review briefly this definition here.
Assume that N is defined on a probability space . On this space, we consider the filtration
. On this space, we consider the filtration

where
 is the class of bounded Borel sets in
is the class of bounded Borel sets in
 and
and
 is the class of Borel sets in
is the class of Borel sets in
 which are bounded away from 0.
which are bounded away from 0.
An elementary process on
 is a process of the form
is a process of the form

where , X is an
, X is an
 -measurable bounded random variable,
-measurable bounded random variable,
 and
and . A pro- cess
. A pro- cess
 is called predictable if it is measurable with respect to the s-field
is called predictable if it is measurable with respect to the s-field
 generated by all linear combinations of elementary processes.
generated by all linear combinations of elementary processes.
As in the classical theory, for any predictable process H such that
 (1)
(1)
we can define the stochastic integral of H with respect to
 and the process
and the process

is a zero-mean square-integrable martingale which satisfies
 (2)
(2)
On the other hand, for any predictable process K such that

we can define the integral of K with respect to N and this integral satisfies
 (3)
(3)
In this article, we work with processes whose trajectories are right-continuous with left limits. If x is a right
continuous function with left limits, we denote by
 the left limit at time t and
the left limit at time t and
 the jump size at time t. We will prove the following result.
the jump size at time t. We will prove the following result.
Theorem 1 (Ito Formula I). Let
 be a process defined by
be a process defined by
 (4)
(4)
where G, K and H are predictable processes which satisfy
 (5)
(5)
 (6)
(6)
 (7)
(7)
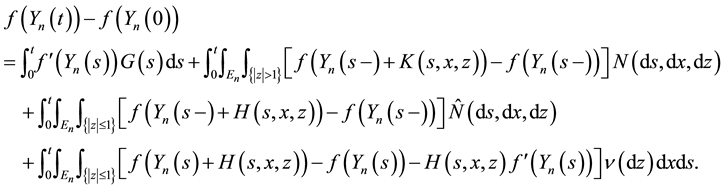
Then there exists a modification of Y (denoted also by Y) whose sample paths are right-continuous with left limits, such that for any function
 and for any
and for any , with probability 1,
, with probability 1,
 (8)
(8)
Note that since the first two terms on the right-hand side of (4) are processes of finite variation and the last term is a square-integrable martingale, Y is a semimartingale. Therefore, the Itô formula given by Theorem 1 can be derived from the corresponding result for a general semimartingale, assuming that Y has sample paths which are right-continuous with left limits (see e.g. Theorem 2.5 of [7] ).
The goal of the present article is to give an alternative proof of this result which contains the explicit construction of the modification of Y for which the Itô formula holds.
We will also give the proof of the following variant of the Itô formula, which will be useful for the applications related to the (finite-variance) Lévy white noise, discussed in Section 4.
Theorem 2 (Ito Formula II). Let
 be a process defined by
be a process defined by
 (9)
(9)
where G and H are predictable processes which satisfy (5), respectively (1). Then there exists a càdlàg modification of Y (denoted also by Y) such that for any , with probability 1,
, with probability 1,

The method that we use for proving Theorems 1 and 2 is similar to the one described in Section 4.4.2 of [6] in the case of classical Lévy processes, the difference being that in our case, N is a PRM on
 instead of
instead of . This method relies on a double “interlacing” technique, which consists in first approximating the set
. This method relies on a double “interlacing” technique, which consists in first approximating the set
 of small jumps by sets of the form
of small jumps by sets of the form
 with
with
 (in the case when H and K vanish outside a bounded Borel set
(in the case when H and K vanish outside a bounded Borel set ), and then approximating the spatial domain
), and then approximating the spatial domain
 by regions of the form
by regions of the form
 with
with . This approximation method is described in Section 2. Section 3 is dedicated to the proofs of Theorems 1 and 2. Finally, in Section 4 we discuss two applications of Theorem 2 in the case of the (finite-variance) Lévy white noise introduced in [1] .
. This approximation method is described in Section 2. Section 3 is dedicated to the proofs of Theorems 1 and 2. Finally, in Section 4 we discuss two applications of Theorem 2 in the case of the (finite-variance) Lévy white noise introduced in [1] .
2. Approximation by Right-Continuous Processes with Left Limits
In this section, we show that the Lévy-type integral processes given by (4) and (9) have right-continuous modifications with left limits, which are constructed by approximation. These modifications will play an important role in the proof of Itô’s formula. Since the process
 is continuous, we assume that
is continuous, we assume that .
.
We consider first processes of the form (4). We start by examining the case when both integrands H and K
vanish outside a set . Since the process
. Since the process
 is clearly càdlàg
is clearly càdlàg
(the integral being a sum with finitely many terms), we need to consider only the integral process which depends on H.
Note that if H vanishes a.e. on
 for some
for some
 and
and , then
, then

is a process whose sample paths are right-continuous with left limits (the first term is a sum with finitely many terms and the second term in continuous). Therefore, we will suppose that H satisfies the following assumption:
Assumption A. It is not possible to find
 and
and
 such that
such that

with respect to the measure .
.
Lemma 1. Let
 be a process defined by
be a process defined by

where
 and H is a predictable process which satisfies Assumption A and
and H is a predictable process which satisfies Assumption A and
 (10)
(10)
Then, there exists a càdlàg modification
 of Y such that for all
of Y such that for all ,
,
where

for some sequence
 (depending on T) such that
(depending on T) such that .
.
Proof: We use the same argument as in the proof of Theorem 4.3.4 of [6] . Fix . Let
. Let

where

Note that
 is non-increasing and
is non-increasing and . (If
. (If
 then
then
 for all n. Hence
for all n. Hence , which contradicts Assumption A.)
, which contradicts Assumption A.)
Note that
 is a càdlàg martingale. By Doob’s submartingale inequality and relation (2),
is a càdlàg martingale. By Doob’s submartingale inequality and relation (2),
By Chebyshev’s inequality, . By Borel-Cantelli lemma, with probability 1, the sequence
. By Borel-Cantelli lemma, with probability 1, the sequence
 is Cauchy in the space
is Cauchy in the space
 of càdlàg functions on
of càdlàg functions on
 equipped with the sup-norm. Its limit
equipped with the sup-norm. Its limit
 is a modification of Y since for any
is a modification of Y since for any ,
,
 also converges to
also converges to
 in
in . Finally, we note that the process
. Finally, we note that the process
 does not depend on T (although the approximation sequence
does not depend on T (although the approximation sequence
 does). If
does). If
 is the modification of Y on
is the modification of Y on
 and
and
 is the modification of Y on
is the modification of Y on
 with
with , then
, then
 a.s. for any
a.s. for any . Hence,
. Hence,
 can be extended to
can be extended to . ,
. ,
We consider now the case when the at least one of the integrands H and K do not vanish outside a set . More precisely, we introduce the following assumptions:
. More precisely, we introduce the following assumptions:
Assumption B. It is not possible to find
 and
and
 such that
such that

with respect to the measure .
.
Assumption . It is not possible to find
. It is not possible to find
 and
and
 such that
such that

with respect to the measure .
.
We consider bounded Borel sets in
 of the form
of the form .
.
Theorem 3 (Interlacing I). Let
 be a process defined by (4) with
be a process defined by (4) with , where H and K are predictable processes which satisfy conditions (7), respectively (6), such that either H satisfies Assumption B, or K satisfies Assumption
, where H and K are predictable processes which satisfy conditions (7), respectively (6), such that either H satisfies Assumption B, or K satisfies Assumption . Then, there exists a càdlàg modification
. Then, there exists a càdlàg modification
 of Y such that for all T > 0,
of Y such that for all T > 0,
 (11)
(11)
where
 is a càdlàg modification of the process
is a càdlàg modification of the process
 defined by
defined by

with
 for some sequence
for some sequence
 (depending on T) such that
(depending on T) such that .
.
Proof: Fix . Let
. Let
 where
where

Note that
 is non-decreasing and
is non-decreasing and . (If
. (If
 then
then
 for all n, and hence
for all n, and hence , which contradicts Assumptions B or
, which contradicts Assumptions B or .) Let
.) Let
 be the process given in the statement of the theorem with
be the process given in the statement of the theorem with . We denote by
. We denote by
 and
and
 the two integrals which compose
the two integrals which compose , depending on H, respectively K.
, depending on H, respectively K.
We denote by
 the càdlàg modification of
the càdlàg modification of
 given by Lemma 1. By Doob’s submartingale inequality and relation (2),
given by Lemma 1. By Doob’s submartingale inequality and relation (2),

By Chebyshev’s inequality, .
.
Note that
 is a càdlàg process. For any
is a càdlàg process. For any ,
,

and hence, using relation (3),

By Markov’s inequality, .
.
Let . Then
. Then , and the conclusion follows by the Borel-Cantelli Lemma, as in the proof of Lemma 1. ,
, and the conclusion follows by the Borel-Cantelli Lemma, as in the proof of Lemma 1. ,
We consider next processes of the form (9) with G = 0. Note that if H vanishes a.e. outside a set
 then
then

where the first term has a càdlàg modification given by Lemma 1, the second term is càdlàg, and the third term is continuous. Therefore, we will suppose that H satisfies the following assumption:
Assumption C. It is not possible to find
 and
and
 such that
such that

with respect to the measure .
.
Theorem 4 (Interlacing II). Let Y be a process given by (9) with , where H is a predictable process which satisfies (1) and Assumption C. Then, there exists a càdlàg modification
, where H is a predictable process which satisfies (1) and Assumption C. Then, there exists a càdlàg modification
 of Y such that (11) holds, where
of Y such that (11) holds, where
 is a càdlàg modification of the process
is a càdlàg modification of the process
 defined by:
defined by:

with
 for some sequence
for some sequence
 (depending on T) such that
(depending on T) such that .
.
Proof: We proceed as in the proof of Theorem 3. Fix . Let
. Let
 where
where

By Assumption C, . We write Yn(t) as the sum of two integrals, corresponding to the regions
. We write Yn(t) as the sum of two integrals, corresponding to the regions ,
,
and . We denote these integrals by
. We denote these integrals by , respectively
, respectively . Note that
. Note that
 is càdlàg. Let
is càdlàg. Let

be the càdlàg modification of
 given by Lemma 1.
given by Lemma 1.
Let . By Doob’s submartingale inequality,
. By Doob’s submartingale inequality,

and the conclusion follows as in the proof of Lemma 1. ,
3. Proof of Itô Formula
In this section, we give the proofs of Theorem 1 and Theorem 2.
We start with the simpler case when there are no small jumps (the analogue of Lemma 4.4.6 of [6] ).
Lemma 2. Let

where G is a predictable process which satisfies (5),
 ,
,
 and K is a predictable process. Then, for any function
and K is a predictable process. Then, for any function
 and for any
and for any ,
,

Proof: We denote . By Proposition 5.3 of [8] , we may assume that the restriction of N to the set
. By Proposition 5.3 of [8] , we may assume that the restriction of N to the set
 has points
has points , where
, where
 are the points of a Poisson process on
are the points of a Poisson process on
 of intensity
of intensity
 and
and
 are i.i.d. on
are i.i.d. on
 with distribution
with distribution , independent of
, independent of . We consider two cases.
. We consider two cases.
Case 1: G = 0. By the representation of N, . So
. So
 is a step function which has a jump of size
is a step function which has a jump of size
 at each point
at each point
 and
and . Hence
. Hence

and the conclusion follows since N has points
 in
in .
.
Case 2: G is arbitrary. The map
 is a step function which has a jump of size
is a step function which has a jump of size
 at time
at time . Since
. Since
 is continuous, the jump times and the jump sizes of Y coincide with those of
is continuous, the jump times and the jump sizes of Y coincide with those of , i.e.
, i.e. . We use the decomposition
. We use the decomposition

where A and B are defined as follows: if , we let
, we let


Note that

It remains to prove that
 (12)
(12)
For this, we assume that
 and we write
and we write

So it suffices to prove that
 (13)
(13)
for all , and
, and
 (14)
(14)
We first prove (13). Fix . For any
. For any
 ,
, and
and .
.
We extend
 by continuity to
by continuity to . Hence
. Hence

where for the last equality we used the fact that
 and hence
and hence
 .
.
This proves (13).
Next, we prove (14). Note that if , both terms are zero. So, we assume that
, both terms are zero. So, we assume that . For any
. For any
 ,
, and
and .
.
Arguing as above, we see that

where for the last equality we used the fact that
 and hence
and hence
 .
.
This concludes the proof of (14). ,
Proof of Theorem 1: We fix . We assume that
. We assume that
 and
and
 are bounded. (Otherwise, we use
are bounded. (Otherwise, we use
 for
for .)
.)
Case 1: H and K vanish outside a fixed set .
.
If H vanishes a.e. on
 for some
for some
 and
and , the conclusion follows from Lemma 2. Therefore, we suppose that H satisfies Assumption A. By Lemma 1, there exists a càdlàg modification of Y (denoted also by Y) such that
, the conclusion follows from Lemma 2. Therefore, we suppose that H satisfies Assumption A. By Lemma 1, there exists a càdlàg modification of Y (denoted also by Y) such that
 (15)
(15)
where the process
 is defined by
is defined by

 being the sequence given by Lemma 1 with
being the sequence given by Lemma 1 with . Consequently,
. Consequently,
 (16)
(16)
Note that

where
 and
and . By the
. By the
Cauchy-Schwarz inequality,
 satisfies (5) (since B is a bounded set and H satisfies (10)). We apply Lemma 2 to
satisfies (5) (since B is a bounded set and H satisfies (10)). We apply Lemma 2 to :
:

After using the definitions of
 and
and , as well as adding and subtracting
, as well as adding and subtracting

we obtain that:
 (17)
(17)
We denote by , respectively
, respectively
 the four terms on the right-hand side of (8). The conclusion will follow by taking the limit as
the four terms on the right-hand side of (8). The conclusion will follow by taking the limit as
 in (17). The left-hand side converges to
in (17). The left-hand side converges to , by (15).
, by (15).
We treat separately the four terms in the right-hand side. By the dominated convergence theorem,

Since
 is a sum with a finite number of terms, using (15) and the continuity of f, we see that
is a sum with a finite number of terms, using (15) and the continuity of f, we see that
 a.s. For the third term, note that
a.s. For the third term, note that , where
, where


and
 a.s., by (15) and the continuity of f. By the dominated convergence theorem,
a.s., by (15) and the continuity of f. By the dominated convergence theorem,
 and
and . To justify the application of this theorem, we use Taylor’s formula of the first order:
. To justify the application of this theorem, we use Taylor’s formula of the first order:
 (18)
(18)
and the fact that
 is bounded. This proves that
is bounded. This proves that
 in
in .
.
Finally,
 , where
, where


and

a.s., by (16) and the continuity of f. By the dominated convergence theorem,
 and
and . To justify the application of this theorem, we use Taylor’s formula of second order:
. To justify the application of this theorem, we use Taylor’s formula of second order:
 (19)
(19)
and the fact that
 is bounded. This proves that
is bounded. This proves that
 in
in .
.
Case 2. H satisfies Assumption B or K satisfies Assumption .
.
By Theorem 3, there exists a càdlàg approximation of Y (denoted also by Y) such that (15) holds, where
 is a càdlàg modification of
is a càdlàg modification of
 being the sequence given by Theorem 3 with
being the sequence given by Theorem 3 with . Using the result of Case 1 for the pro- cess
. Using the result of Case 1 for the pro- cess , we obtain
, we obtain
The conclusion follows letting
 as in Case 1. ,
as in Case 1. ,
Proof of Theorem 2: We assume that
 and
and
 are bounded. We fix t.
are bounded. We fix t.
Case 1. H vanishes outside a set . We write
. We write

where . By the Cauchy-Schwarz inequality,
. By the Cauchy-Schwarz inequality,
 satisfies (5) (since B
satisfies (5) (since B
is a bounded set). By Theorem 1, there exists a càdlàg modification of Y (denoted also by Y) such that
We add and subtract . The conclusion follows by rear-
. The conclusion follows by rear-
ranging the terms.
Case 2. H satisfies Assumption C.
By Theorem 4, there exists a càdlàg modification of Y (denoted also by Y) such that (15) holds, where
 is a càdlàg modification of
is a càdlàg modification of

 being the sequence given by Theorem 4 with
being the sequence given by Theorem 4 with . We write the Itô formula for the process
. We write the Itô formula for the process
 (using Case 1) and we let
(using Case 1) and we let . ,
. ,
4. Applications
In this section, we assume that the Lévy measure
 satisfies the condition:
satisfies the condition:
As in [1] , we consider the process
 defined by:
defined by:

For any predictable process
 such that
such that
 (20)
(20)
we can define the stochastic integral of X with respect to L and this integral satisfies:

By (2), this integral has the following isometry property:

When used as a noise process perturbing an SPDE, L behaves very similarly to the Gaussian white noise. For this reason, L was called a Lévy white noise in [1] .
4.1. Kunita Inequality
The following maximal inequality is due to Kunita (see Theorem 2.11 of [7] ). In problems related to SPDEs with noise L, this result plays the same role as the Burkholder-Davis-Gundy inequality for SPDEs with Gaussian white noise.
Theorem 5 (Kunita Inequality). Let
 be a process given by
be a process given by

where X is a predictable process which satisfies (20).
If
 for some
for some , then for any
, then for any ,
,

where
 and
and
 is the constant in Theorem 2.11 of [7] .
is the constant in Theorem 2.11 of [7] .
Proof: We apply Theorem 2 with
 and
and . The proof is identical to that of Theorem 2.11 of [7] . We omit the details. ,
. The proof is identical to that of Theorem 2.11 of [7] . We omit the details. ,
Remark 1. Kunita’s constant
 cannot be computed explicitly. Theorem 5 is proved in [9] using a different method which shows that
cannot be computed explicitly. Theorem 5 is proved in [9] using a different method which shows that
 is directly related to the constant
is directly related to the constant
 in Rosenthal’s inequality, which is
in Rosenthal’s inequality, which is .
.
4.2. Itô Representation Theorem and Chaos Expansion
In this section, we give an application to Theorem 2 to exponential martingales, which leads to Itô representation theorem and a chaos expansion (similarly to Sections 5.3 and 5.4 of [6] ).
For any
 we let
we let
 for
for . We work with the càdlàg modi-
. We work with the càdlàg modi-
fication of the process
 given by Theorem 4. By Lemma 2.4 of [1] ,
given by Theorem 4. By Lemma 2.4 of [1] ,

where

Hence
 for all
for all , where
, where

The following result is the analogue of Lemma 5.3.3 of [6] .
Lemma 3. For any
 and
and , with probability 1,
, with probability 1,

Proof: We apply Theorem 2 to the function
 and the process
and the process

Hence,
 and
and . We obtain:
. We obtain:

Since the sum of the last two integrals is 0, the conclusion follows. ,
We fix . We let
. We let . We denote by
. We denote by
 be the space
be the space
of C-valued square-integrable random variables which are measurable with respect to .
.
Lemma 4. The linear span of the set
 is dense in
is dense in .
.
Proof: The proof is similar to that of Lemma 5.3.4 of [6] . We omit the details. ,
Theorem 6 (Ito Representation Theorem). For any , there exists a unique predictable C-valued process
, there exists a unique predictable C-valued process
 satisfying
satisfying
 (21)
(21)
such that
 (22)
(22)
Proof: By Lemma 3, relation (22) holds for
 with
with . The conclusion follows by an approximation argument using Lemma 4. ,
. The conclusion follows by an approximation argument using Lemma 4. ,
The multiple (and iterated) integral with respect
 can be defined similarly to the Gaussian white-noise case (see e.g. Section 5.4 of [6] ).
can be defined similarly to the Gaussian white-noise case (see e.g. Section 5.4 of [6] ).
More precisely, we consider the Hilbert space , where
, where
 ,
,  and
and .
.
For any integer , we consider the n-th tensor product space
, we consider the n-th tensor product space . The n-th multiple integral
. The n-th multiple integral
 with respect to
with respect to
 can be constructed for any function
can be constructed for any function , and this integral has the isometry property:
, and this integral has the isometry property:

Moreover, if , then
, then
 for all
for all
 and
and .
.
We have the following result.
Theorem 7 (Chaos Expansion). For any , there exist some symmetric functions
, there exist some symmetric functions ,
,
 such that
such that

In particular,

Proof: We use the same argument as in the classical case, when
 is a PRM on
is a PRM on
 and
and
is a square-integrable Lévy process (see Theorem 5.4.6 of [6] or Theorem 10.2 of [10] ). By Theorem 6, there exists a predictable process
 satisfying (1) such that
satisfying (1) such that
 (23)
(23)
By (21),
 for almost all
for almost all . For such
. For such
 fixed, we apply Theorem 6 again to the variable
fixed, we apply Theorem 6 again to the variable . Hence, there exists a predictable process
. Hence, there exists a predictable process

Satisfying

such that

We substitute this into (23) and iterate the procedure. We omit the details. ,
Acknowledgements
Research of R. M. Balan is funded by a grant from the Natural Sciences and Engineering Research Council of Canada.
Cite this paper
Raluca M.Balan,Cheikh B.Ndongo, (2015) Itô Formula for Integral Processes Related to Space-Time Lévy Noise. Applied Mathematics,06,1755-1768. doi: 10.4236/am.2015.610156
References
- 1. Balan, R.M. (2015) Integration with Respect to Lévy Colored Noise, with Applications to SPDEs. Stochastics, 87, 363- 381.
http://dx.doi.org/10.1080/17442508.2014.956103 - 2. Balan, R.M. (2014) SPDEs with α-Stable Lévy Noise: A Random Field Approach. International Journal of Stochastic Analysis, 2014, Article ID: 793275.
http://dx.doi.org/10.1155/2014/793275 - 3. Walsh, J.B. (1989) An Introduction to Stochastic Partial Differential Equations. Ecole d’Eté de Probabilités de Saint- Flour XIV. Lecture Notes in Math, 1180, 265-439.
http://dx.doi.org/10.1007/BFb0074920 - 4. Rajput, B.S. and Rosinski, J. (1989) Spectral Representations of Infinitely Divisible Processes. Probability Theory and Related Fields, 82, 451-487.
http://dx.doi.org/10.1007/BF00339998 - 5. Samorodnitsky, G. and Taqqu, M.S. (1994) Stable Non-Gaussian Random Processes. Chapman and Hall, New York.
- 6. Applebaum, D. (2009) Lévy Processes and Stochastic Calculus. 2nd Edition, Cambridge University Press, Cambridge.
http://dx.doi.org/10.1017/CBO9780511809781 - 7. Kunita, H. (2004) Stochastic Differential Equations Based on Lévy Processes and Stochastic Flows of Diffeomorphisms. In: Rao, M.M., Ed., Real and Stochastic Analysis, New Perspectives, Birkhaüser, Boston, 305-375.
http://dx.doi.org/10.1007/978-1-4612-2054-1_6 - 8. Resnick, S.I. (2007) Heavy Tail Phenomena: Probabilistic and Statistical Modelling. Springer, New York.
- 9. Balan, R.M. and Ndongo, C.B. (2015) Intermittency for the Wave Equation with Lévy White Noise. Arxiv: 1505.04167.
- 10. Di Nunno, G., Oksendal, B. and Proske, F. (2009) Malliavin Calculus for Lévy Processes with Applications to Finance. Springer-Verlag, Berlin.
http://dx.doi.org/10.1007/978-3-540-78572-9
NOTES

*Corresponding author.