A. A. ALY75
(a)
(b)
(c)
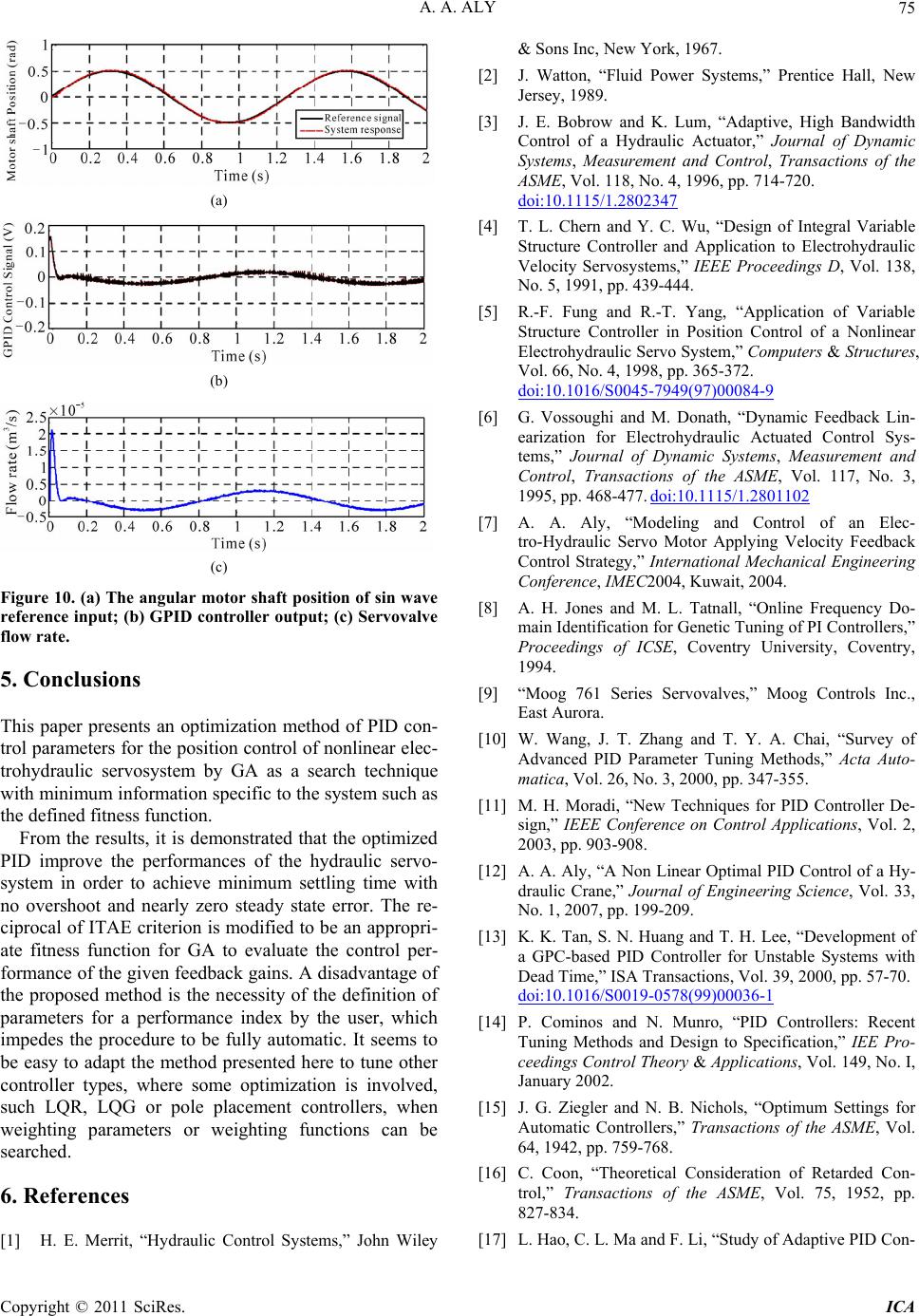
Figure 10. (a) The angular motor shaft position of sin wave
reference input; (b) GPID controller output; (c) Servovalve
flow rate.
5. Conclusions
This paper presents an optimization method of PID con-
trol parameters for the position control of nonlinear elec-
trohydraulic servosystem by GA as a search technique
with minimum information specific to the system such as
the defined fitness function.
From the results, it is demonstrated that the optimized
PID improve the performances of the hydraulic servo-
system in order to achieve minimum settling time with
no overshoot and nearly zero steady state error. The re-
ciprocal of ITAE criterion is modified to be an appropri-
ate fitness function for GA to evaluate the control per-
formance of the given feedback gains. A disadvantage of
the proposed method is the necessity of the definition of
parameters for a performance index by the user, which
impedes the procedure to be fully automatic. It seems to
be easy to adapt the method presented here to tune other
controller types, where some optimization is involved,
such LQR, LQG or pole placement controllers, when
weighting parameters or weighting functions can be
searched.
6. References
[1] H. E. Merrit, “Hydraulic Control Systems,” John Wiley
& Sons Inc, New York, 1967.
[2] J. Watton, “Fluid Power Systems,” Prentice Hall, New
Jersey, 1989.
[3] J. E. Bobrow and K. Lum, “Adaptive, High Bandwidth
Control of a Hydraulic Actuator,” Journal of Dynamic
Systems, Measurement and Control, Transactions of the
ASME, Vol. 118, No. 4, 1996, pp. 714-720.
doi:10.1115/1.2802347
[4] T. L. Chern and Y. C. Wu, “Design of Integral Variable
Structure Controller and Application to Electrohydraulic
Velocity Servosystems,” IEEE Proceedings D, Vol. 138,
No. 5, 1991, pp. 439-444.
[5] R.-F. Fung and R.-T. Yang, “Application of Variable
Structure Controller in Position Control of a Nonlinear
Electrohydraulic Servo System,” Computers & Structures,
Vol. 66, No. 4, 1998, pp. 365-372.
doi:10.1016/S0045-7949(97)00084-9
[6] G. Vossoughi and M. Donath, “Dynamic Feedback Lin-
earization for Electrohydraulic Actuated Control Sys-
tems,” Journal of Dynamic Systems, Measurement and
Control, Transactions of the ASME, Vol. 117, No. 3,
1995, pp. 468-477. doi:10.1115/1.2801102
[7] A. A. Aly, “Modeling and Control of an Elec-
tro-Hydraulic Servo Motor Applying Velocity Feedback
Control Strategy,” International Mechanical Engineering
Conference, IMEC2004, Kuwait, 2004.
[8] A. H. Jones and M. L. Tatnall, “Online Frequency Do-
main Identification for Genetic Tuning of PI Controllers,”
Proceedings of ICSE, Coventry University, Coventry,
1994.
[9] “Moog 761 Series Servovalves,” Moog Controls Inc.,
East Aurora.
[10] W. Wang, J. T. Zhang and T. Y. A. Chai, “Survey of
Advanced PID Parameter Tuning Methods,” Acta Auto-
matica, Vol. 26, No. 3, 2000, pp. 347-355.
[11] M. H. Moradi, “New Techniques for PID Controller De-
sign,” IEEE Conference on Control Applications, Vol. 2,
2003, pp. 903-908.
[12] A. A. Aly, “A Non Linear Optimal PID Control of a Hy-
draulic Crane,” Journal of Engineering Science, Vol. 33,
No. 1, 2007, pp. 199-209.
[13] K. K. Tan, S. N. Huang and T. H. Lee, “Development of
a GPC-based PID Controller for Unstable Systems with
Dead Time,” ISA Transactions, Vol. 39, 2000, pp. 57-70.
doi:10.1016/S0019-0578(99)00036-1
[14] P. Cominos and N. Munro, “PID Controllers: Recent
Tuning Methods and Design to Specification,” IEE Pro-
ceedings Control Theory & Applications, Vol. 149, No. I,
January 2002.
[15] J. G. Ziegler and N. B. Nichols, “Optimum Settings for
Automatic Controllers,” Transactions of the ASME, Vol.
64, 1942, pp. 759-768.
[16] C. Coon, “Theoretical Consideration of Retarded Con-
trol,” Transactions of the ASME, Vol. 75, 1952, pp.
827-834.
[17] L. Hao, C. L. Ma and F. Li, “Study of Adaptive PID Con-
Copyright © 2011 SciRes. ICA






