M. E. SALIH ET AL.
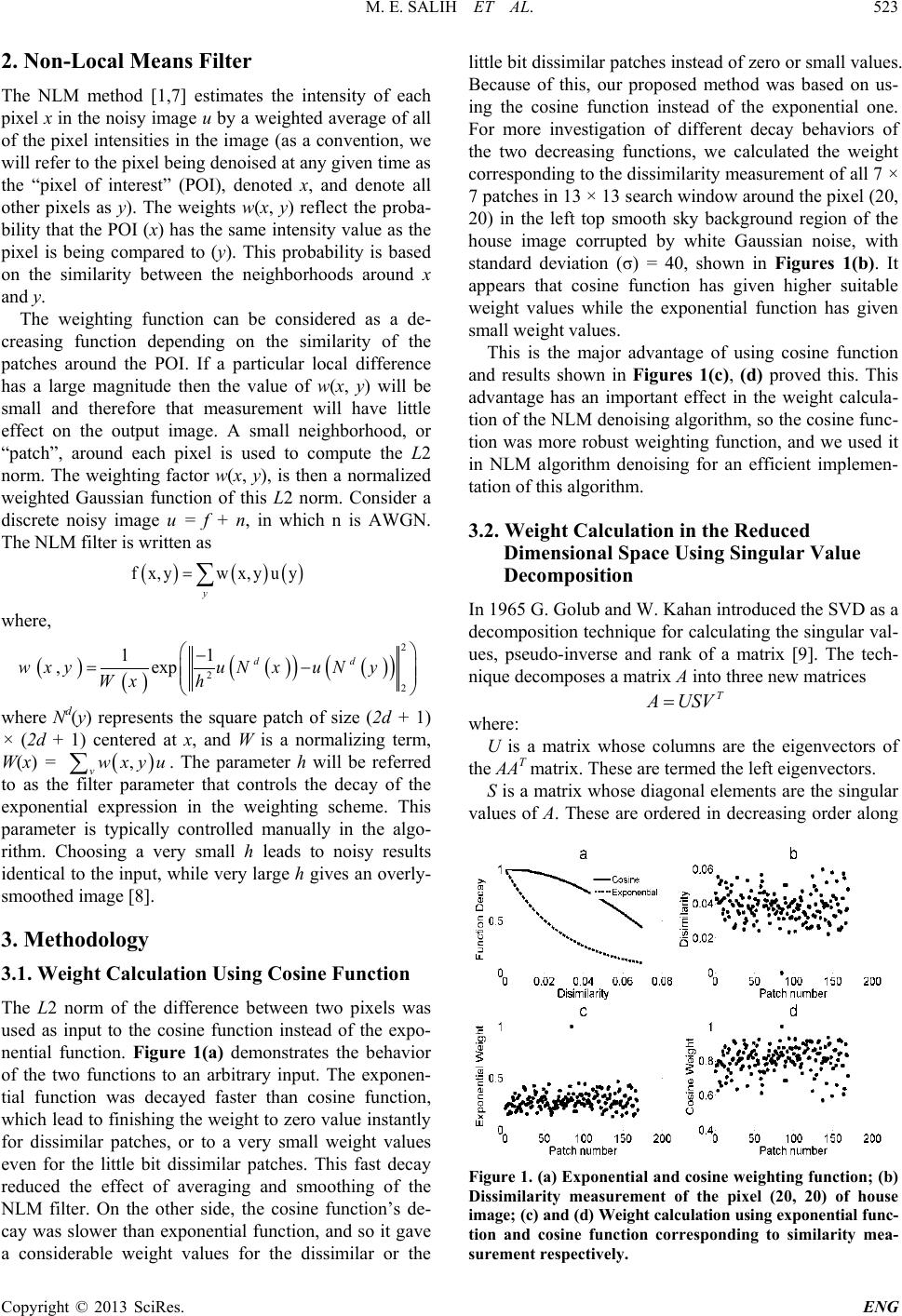
Copyright © 2013 SciRes. ENG
the diago na l of S, i.e. s1 > s2 > s3 > ··· sn.
V is a matrix whose columns are the eigenvectors of
the ATA matrix. These are termed the right eigenvectors.
When computing the SVD of a matrix is desirable to
reduce its dimensions by keeping its first k singular val-
ues.
This process is termed dimensionality reduction, and
AK is referred to as the rank k Approximation of A, or the
“Reduced SVD” of A. If we eliminate dimensions by
keeping the three largest singular values, this is a rank 3
approximation [10]. The top k singular values are se-
lected as a mean for developing a “latent semantics” re-
presentation of A that is now free from noisy dimensions.
This “latent semantics” representation is a specific data
structure in low-dimensional space in which documents,
terms and queries are embedded and compared. This
hidden or “latent” data structure is masked by noisy di-
mensions and becomes evident after the SVD. We re-
placed the distances
( )
( )
( )
( )
2
2
1
dd
uN xuNy
h
−−
(3)
by
( )
( )
( )
( )
2
2
1dd
uP xuPy
h
−−
(4)
where Pd represents the projections of Nd onto the low-
er-dimensional space determined by the SVD. If Nd is a
particular row in A, then the weights for Nd are just the
corresponding row in U multiplied by diagonal elements
of S. The weights for Nd are referred to as projection of
Nd into the k-dimensional space. Better denoising is ob-
tained when similarity between pixels is computed using
the dim e ns i on reduction introduced by the SVD.
4. Experiment Results and Discussions
In the experiment, the size of patch, search window, h
parameter values and rank k Approximation were se-
lected corresponding to the best PSNR value. Our pro-
posed NLM algorithm was applied on four test images
(Lena, Cameraman, Pepper, and House); Using a 256 ×
256 image size for all the images, and a 128 × 128 image
size for Lena image. The test images were corrupted by
AWGN with zero mean at σ = 10 (low noise level), and
40 (high noise level). The results were shown using
PSNR in decibels (dB) and histogram to demonstrate the
superior performance of the proposed method in noise
reduction. We used the PSNR measurement defined as
2
10log MAX
PSNR MSE
=
where, MSE is Mean Square Error, and MAX is maxi-
mum intensity value.
Table 1 lists The PSNR comparison results. Us ing co-
sine function produces better PSNR values when com-
pared to the original NLM algorithms for all the different
noise levels. The average performance is high (0.7054
dB) for the all images corrupted by a high level noise,
while it is low (0.0440 dB) for the all images corrupted
by low level noise.
That means the cosine function outperforms in the
high level noise and this because of the dissimilarity be-
tween patches will increase more than in the low level of
noise the and so the exponential function will give zero
or small weight values while cosine weight function w ill
give them more and suitable weight values. This is useful,
and it enhances the effect of averaging and smoothening
of the NLM filter.
The results s ho w that the most cosine function supe-
riority, where the performance is (1.12 dB), mainly ap-
pears in the noisy (AWGN) house image, (σ = 40). To
increase the average performance for the images cor-
rupted by low level noise, which is low as we mentioned
previously, we combined the SVD with cosine function
to calculate the distances between the pixels in the low
dimensional space rather than the full space. The results
showed an increased accuracy over using the full space.
The average performance increased form (0.0440 dB to
0.2505 dB). This is because the hidden or “latent” data
structure is masked by noisy dimensions and becomes
evident after the SVD. And similarity computed in low-
er-dimensional space becomes more accurate because
SVD remove noisy dimensions.
Although we only applied the SVD on images cor-
rupted by low level noise to increase the performance of
the algorithm; but also it will work for images corrupted
by moderate level noise. Because the noise will increase
more than in the low level of noise but SVD will remove
it and the weight calculation will be more efficiency. Our
method works well for all the images, but it works better
for images (House and Pepper) which have a smooth
region more than images (Lena and Cameraman) which
have more details.
Table 1. Performance of the original nonlocal means de-
noising algorithm and the modified algorithm.
Images
PSNR
10 40
Exp Cos Cos + SVD Exp Cos
Lena 32.0748 32.0174 32.1233 23.5971 24.1023
Cameraman 33.0014 33.0629 33.3857 25.3136 25.8697
Pepper 33.0034 34.0264 34.1926 25.7601 26.4025
House 35.1249 35.2667 35.4981 27.5251 28.6433
Average 33.5494 33.5934 33.7999 25.5490 26.2544
Performance 0.0440 0.2505 0.7054