 Communications and Network, 2013, 5, 661-665 http://dx.doi.org/10.4236/cn.2013.53B2118 Published Online September 2013 (http://www.scirp.org/journal/cn) Estimation of Non-WSSUS Channel for OFDM Systems in High Speed Railway Environment Using Compr essive Sensing* Chen Wang, Yong Fang, Zhi-Chao Sheng School of Communication and Information Engineering, Shanghai University, Shanghai, China Email: cwangsh@shu.edu.cn, yfang@staff.shu.edu.cn, kebon22@shu.edu.cn Received July 2013 ABSTRACT Non Wide Sense Stationary Uncorrelated Scattering (Non-WSSUS) is one of characteristics for high-speed railway wireless channels. In this paper, estimation of Non-WSSUS Channel for OFDM Systems is considered by using Com- pressive Sensing (CS) method. Given sufficiently wide transmission bandwidth, wireless channels encountered here tend to exhibit a sparse multipath s tructure. Then a sparse Non-WSSUS channel estimation approach is proposed based on the delay-Doppler-spread function representation of the channel. This approach includes two steps. First, the de- lay-Doppler-spread function is estimated by the Compressive Sensing (CS) method utilizing the delay-Doppler basis. Then, the channel is tracked by a reduced order Kalman filter in the sparse delay-Doppler domain, and then estimated sequentially. Simulation results under LTE-R standard demonstrate that the proposed algorithm significantly improves the performance of channel estimation, comparing with the conventional Least Square (LS) and regular CS methods. Keywords: OFDM; Non-WSSUS Channel Estimation; Compressive Sensing (CS); Kalman Filter; LTE-R 1. Introduction In recent several years, High-Speed Railway (HSR) in China has made great progress and attracted the world’s attention [1]. The new speed record of high speed train is at 486.1 km/h [2]. The broadband wireless access on HSRs, also known as train-ground communication has become a hot issue. To develop high quality service wire- less communications that meet the demand of next-gen- eration broadband wireless access for high-speed railway has become an urgent problem. It has been shown that the communication quality of the existing wireless net- work of HSR s is qu ite po or , wh ere a h igh rate of dr oppe d calls and low data rate are observed [3]. LTE-R [4,5] basing on OFDM is commonly considered as a promis- ing candidate to provide high quality of service. Since the serious time and frequency selective fading, which affects the OFDM symbol at the physical layer greatly impacts system OFDM performance, the estimation and compensation of the channel variation for each OFDM symbol is crucial [6]. In the wireless communication, one of the most prac- tical assumptions about the wireless channel is that of Wide Sense Statio nary Uncorrela ted Scatteri ng, (WSSUS). Existing fast fading channel estimation methods most generalized stationary uncorrelated scattering (WSSUS) as a precondition [7], or satisfied some certain channel statistical characteristics, e.g. Jakes’ channels [8]. How- ever, this assumption is no longer valid when the tran- sceivers operate in the high speed railway environment. Because for the HSR channel, the transceiver encounters different channel conditions and the train runs across the scenarios so rapidly [3]. This condition provokes the mul- tipath arrivals associated with surface scattering fluctuate rapidly over time, in the sense that the channel gain, the arrival time, and the Doppler shifts of each arrival all change dynamically [9], as a result the channel is Non- WSSUS. The study of statistical characteristics of Non- WSSUS has drawn much attention of researchers [10,11]. But in order to perform OFDM channel estimation, the channel impulse response (CIR) is needed to be esti- mated. Apart from the fact that HS R channel is Non-WSSUS, it is also sparse. For one thing, numerous experimental studies undertaken by various researchers in the recent have shown that wireless ch annels assoc iated with a num- ber of scattering environments tend to exhibit sparse struc- tures at large bandwidths [12]. For another, compared This work was su pported by the National Science Fou ndation of Ch i- na (61271213, 61132004, 60972056) . Copyright © 2013 SciRes. CN  C. WANG ET AL. with urban and indoor conditions, the specular LOS com- ponent is much stronger. Thus, the channel is generally lower density scattered [3], which enhances the sparse structures of the HSR channel. According to the characteristics of HSR channel men- tioned above, a Non-WSSUS channel estimatio n approach is developed in this paper. It utilizes the channel delay- Doppler-spread representation to accommodate the Non- WSSUS of the CIR. This approach includes two steps. In the first step, it utilizes the delay-Doppler shifts basis to estimate the sparse HSR channel. In the second step, the channel is tracked by a reduced order Kalman filter in the sparse delay-Doppler shift domain, and then recovered by CS method sequentially. One can, in turn, use the de- tected pilots to perform a sequential approach for channel estimation and data recovery. Our approach is not limited by certain statistical characteristics. This paper is organized as follows: Section 2 intro- duces the Non-WSSUS channel and the OFDM system models. Section 3 explains the estimation of the sparse channel delay-Doppler-spread in the OFDM system. Sec- tion 4 describes the sparse dynamic model for the Non- WSSUS HSR channel, and then our proposed approach for estimating Non-WSSUS channel is derived . Section 5 presents the simulations results which validate our ap- proach. Finally, our conclusions are presented in Section 6. 2. Non-WSSUS Channel and OFDM System Models 2.1. Non-WSSUS Channel Models There are many equivalent ways of characterizing LTV systems. We use the delay-Doppler-spread function C(υ, τ) for channel characterization [13,14]. The time-varying frequency response and the delay-Doppler spread- ing function constitute a two-dimensional Fourier trans- form pair. It is defined by 22 2 H( ,)C(,)ee j tjf tf dd πυ πτ υτυ τ − =∫∫ (1) The quantity is the contribution to from a scatterer at delay and Doppler. The discrete representa- tion of Equation (1) is given by [12], 22 1 H( ,)ee p nn Njf t n n tf πτ πυ α − = = ∑ (2) which represents signal propagation over paths. In another word, there are pairs, corresponding to dis- tinct scatterers at different delay and Doppler. We as- sume that the channel is maximally spread in the delay and Doppler space, and . It has been shown that if (the discrete coefficients of ) is a function of discrete time , then channel is not WSS anymore [13]. If the matrix repre- sentation of is not diagonal, then channel is not US, which wil l be furthe r de monst ra t e d in Sectio n 3. 2.2. OFDM System Models In OFDM systems, the output symbol of the transmitter at time is given by the point complex modulation sequen ce , where is the data symbol. The orthogonal short-time Fourier (STF) basis wave- forms , as a ge neralization of OFDM signaling to counteract the time selectivity of doubly- selective channels are used [14]. The parameter and correspond to the time and frequency separation of the STF basis, and are chosen so that (which gives rise to an orthogona l STF basis). 3. Estimation of the OFDM Sparse Channel Delay-Doppler-Spre a d 3.1. Delay-Doppler-Spread Representation Consider signaling over wireless channels using symbols of duration T and (two-sided) bandwidth W, and , , the- reby giving rise to a temporal signal space of dimension [12]. So the maximum number of resolvable delays, and the maximum number of resolvable Doppler shift, . The matrix representa- tion of delay-Doppler-spread [15] is as 0,0, 10, 1,1, 11, 1,1, 11, H KK K KK K LK LKLK hh h hh h hh h α − −+ − −+ −−−− +− = (3) Now recall from Section 2 that the time-varying fre- quency response (Equation (2)). The virtual representa- tion of a doubly-selective channel therefore implies that 2 2 1 0 H( ,)ee l kjf jt LK W T l kK tf π π α − − = =− ≈∑∑ . Consequently, the STF channel coefficients can be written as 2 2 1 , ,, 0 Heeu Hu k jn Ntf l jm LK N nmf mtn lkK π π α α − − = =− ′ = = ∑∑ (4) Where , ( 1) u 1()0, ,1 tt t tn def knk nkn NN Nt t WWW nN N − −+ == − Copyright © 2013 SciRes. CN  C. WANG ET AL. 1( 1) , 1 u(1)0, ,1 ff def m Lm fmN Nf t W WmN N − ′== − It is straightforward to see that if is not diagonal, then the scatterer will be interfer ed by other scatterers, leading to a correlated scatterer. 3.2. Using CS to Estimate the Sparse Channel Delay-Doppler-Spread By sampling pilot symbols uniformly at random (without replacement) from the whole temporal signal space of dimension , the D-sparse (the number of nonzero elements of delay-Doppler-spread function is D) channel delay-Doppler-spread estimation will have the following equation, (5) where , () H() p pp yreceive pilots x transmit pilots = , ,, U{/(uu):(,)} pptnf m Nn mpilots ε ′′ = ⊗∈ , is the system transmit energy budget, and is the channel ob- servation noise. Since is sparse, it is can be recovered form by various CS methods (here we use OMP and CoSaMP). Then the CIR can be built according to Equation (4). 4. Estimation of Non-WSSUS Channel 4.1. Non-WSSUS Channel Model Since the HSR channel is determined by its delay- Doppler-spread representation, we just need to discuss the dynamic model for delay-Doppler-spread function. For the currently non-zero coefficients of at dis- crete time n, we assume a spatially i.i.d. Gaussian ran- dom walk model, with noise variance . The initial is estimated by the CS sparse channel delay- Doppler-spread estimation method mentioned in Section 3. is assumed to be generated from a zero mean Gaussian with variance , and the non- zero element is randomly selected. Let denote the support set of , i.e. the set of its nonzero coordinates, and let . In other words, where are the non-zero coordinates of . Thus, under this assumption we have the dynamic model shown in Table 1. Table 1. Dynamic model for sparse delay-Doppler-spread. α (0) is generated from the D-sparse channel with randomly selected nonzero elements 2 1 (H ())(H (1))(),() ~(0,), ii ni nisysnn nnvv NifiTiT αα σ − = −+∈∈ 2 ,1 (H ())(H (1))(),()~(0,), ii ni niDnn nnv v NifiTiT αα σ − = −+∈∉ (H ())(H (1)) ii nnif i T αα =−∉ 4.2. Estimation of Non-WSSUS Channel Combining observation equation (Equation (5)) and state equation (Table 1) together, we get Non-WSSUS chan- nel representation by utilizing the sparse delay-Doppler- spread function. This dynamic model of can be tracked by Kalman filter, and then the CIR of Non- WSSUS channel can be recovered, as a result, the Non- WSSUS channel will be estimated sequentially. Since the delay-Doppler-spread is sparse, KF-CS method is em- ployed to solve the dynamic sparse channel problem. The proof of the convergence of KF-CS and more details can be found in [16,17]. Take the KF-CS algorithm into ac- count, our proposed two-step approach is summarized in Table 2. 5. Simulation This approach was tested and compared according to the LTE-R standard. The channel parameters are: Channel parameters , and the speed of the high speed train is 500 km/h leading to with the Carrier Frequency . The system parameters are: Total number of subcarriers N = 1024, number of effective subcarriers are 600. The effective bandwidth is W = 5.9 MHz. To avoid ISI, the symbol duration is 20 times of the , i.e., . The and . For the OFDM system, the STF basis parameters are chosen to be and to ensure an orthogonal STF, which corres- pond to , Nf = 65. The pilot arrangements are comb -type. We first justify the first-step of the p ropose d appro ach. The simulations are carried out under the assumption that only 10% of the channel coefficients are nonzero, i.e. D = 18. The channel matrix is generated from a zero mean Gaussia n wi th varianc e . Figure 1 depicts the mean square error (MSE) of the channel estimates and the bit error rate (BER) versus the channel signal-to-noise ratio (SNR) in the unit dB. It is seen that both CS-based methods (with 10% pilots and 25% pilots) outperform the LS method (with 10% and 25% pilots) significantly. The LS and severely under- performs the CS estimator with 10% pilots even when it itself utilizes 25% pilots. Table 2. Two step approach to estimate the HSR Non- WSSUS channel . Utilize the delay-Doppler basis to e stimate the sparse delay-Doppler Hα. Use the delay-Doppler basis Up and Hα to rebuilt the estimated CIR . . Run KF-CS algorithm to track the Hα(n) in the sparse domain. Take step 1.1 into account, the Non-WSSUS CIR can be estimated over time n. Copyright © 2013 SciRes. CN 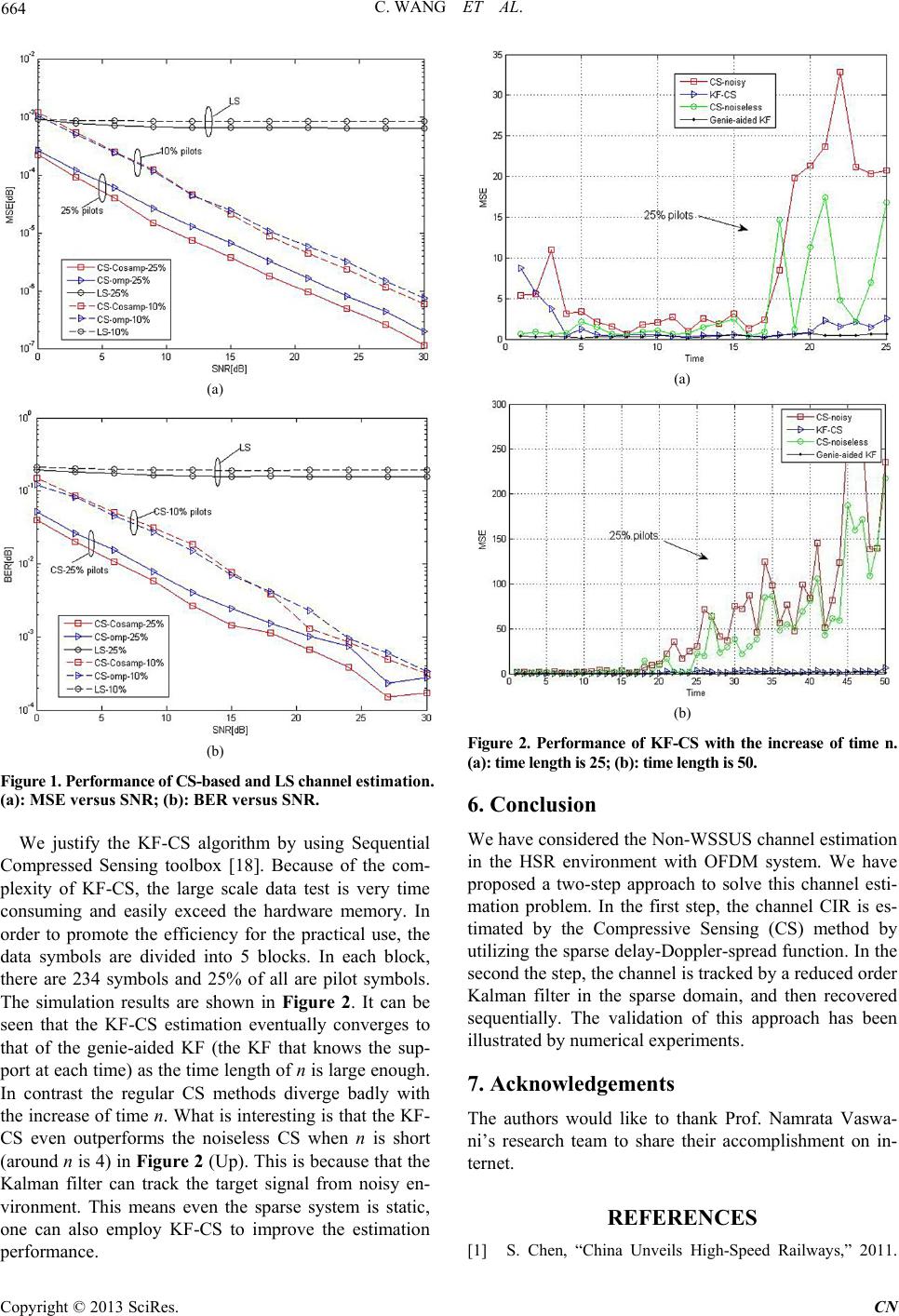 C. WANG ET AL. (a) (b) Figure 1. Performance of CS-based and LS channel estimation. (a): MSE versus SNR; (b): BER versus SNR. We justify the KF-CS algorithm by using Sequential Compressed Sensing toolbox [18]. Because of the com- plexity of KF-CS, the large scale data test is very time consuming and easily exceed the hardware memory. In order to promote the efficiency for the practical use, the data symbols are divided into 5 blocks. In each block, there are 234 symbols and 25% of all are pilot symbols. The simulation results are shown in Figure 2. It can be seen that the KF-CS estimation eventually converges to that of the genie-aided KF (the KF that knows the sup- port at each time) as the time length of n is large enough. In contrast the regular CS methods diverge badly with the increase of time n. What is interesting is that the KF- CS even outperforms the noiseless CS when n is short (around n is 4) in Figure 2 (Up). This is because that the Kalman filter can track the target signal from noisy en- vironment. This means even the sparse system is static, one can also employ KF-CS to improve the estimation performance. (a) (b) Figure 2. Performance of KF-CS with the increase of time n. (a): time length is 25; (b): time length is 50. 6. Conclusion We have considered the Non-WSSUS channel estimation in the HSR environment with OFDM system. We have proposed a two-step approach to solve this channel esti- mation problem. In the first step, the channel CIR is es- timated by the Compressive Sensing (CS) method by utilizing the sparse delay-Doppler-spread function. In the second the step, the channel is tracked by a reduced order Kalman filter in the sparse domain, and then recovered sequentially. The validation of this approach has been illustrated by numerical expe riments. 7. Acknowledgements The authors would like to thank Prof. Namrata Vaswa- ni’s research team to share their accomplishment on in- ternet. REFERENCES [1] S. Chen, “China Unveils High-Speed Railway s, ” 2011. Copyright © 2013 SciRes. CN  C. WANG ET AL. http://news.bbc.co.uk/2/hi/8246600.stm [2] D. Xin., “Record-Breaking Train on Track,” 2010. http://www.chinadaily.com.cn/china/2010-12/04/content- 11651930.html [3] L. Liu, et al., “Position-Based Modeling for Wireless Channel on High-Speed Railway under a Viaduct at 2.35 GHz,” IEEE Journal on Selected Areas in Communica- tions, Vol. 30, No. 4, 2012, pp. 834-845. http://dx.doi.org/10.1109/JSAC.2012.120516 [4] T. Gao and B. Sun, “A High-Speed Railway Mobile Communication System Based on LTE,” Electronics and Information Engineering (ICEIE), 2010, Vol. 1, pp. 414- 417. [5] K. Guan, Z. Zhong and B. Ai, “Assessment of LTE-R Using High Speed Railway Channel Model,” Interna- tional Conference Communications and Mobile Compu- ting (CMC), 2011, pp. 461-464. [6] F. Pena-Campos, et al., “Estimation of Fast Time-Vary- ing Channels in OFDM Sy stems Using Two-Dimensional Prolate,” IEEE Transactions on Wireless Communica- tions, Vol. 12, No. 2, 2013, pp. 989-907. [7] L. L. He, S. D. Ma, and Y. C. Wu, “Pilot-Aided IQ Im- balance Compensation for OFDM Systems Operating Over Doubly Selective Channels,” IEEE Trans on Signal Processing, V o l. 59, No. 5, 2011, pp. 2223-2233. http://dx.doi.org/10.1109/TSP.2011.2112649 [8] H. Hijazi, et al., “Channel Estimation for MIMO-OFDM Systems in Fast Time-Varying Environments,” 2010 4th International Symposium on Communications, Control and Signal Processing (ISCCSP), 2010, pp. 1-6. [9] W. C. Li, and C. P. James, “Estimation of Rapidly Time- Varying Sparse Channels,” IEEE Journal of Oceanic En- gineering, Vol. 32, No. 4, 2007, pp. 927-939. http://dx.doi.org/10.1109/JOE.2007.906409 [10] G. Matz, “On Non-WSSUS Wireless Fading Channels,” IEEE Transactions on Wireless Communications, Vol. 4, No. 5, 2005, pp. 2465-2478. http://dx.doi.org/10.1109/TWC.2005.853905 [11] M. Jachan and M. Gerald, “Nonstationary Vector AR Modeling of Wireless Channels,” Workshop on Signal Processing Advances in Wireless Communications, 2005, pp. 625-629. [12] W. U. Bajwa, et al., “Compressed Channel Sensing: A New Approach to Estimating Sparse Multipath Channels,” Proceedings of the IEEE, Vol. 98, No. 6, 2010, pp. 1058- 1076. http://dx.doi.org/10.1109/JPROC.2010.2042415 [13] T. H. Eggen, B. B. Arthur and C. P. James, “Communica- tion over Doppler Spread Channels. Part I: Channel and Receiver Presentation,” IEEE Journal of Oceanic Engi- neering, Vol. 25, No. 1, 2000, pp. 62-71. http://dx.doi.org/10.1109/48.820737 [14] Waheed Uz Zaman Bajwa, “New Information Processing theory and Methods for Exploiting Sparsity Inwireless SystemS,” Ph.D. Thesis, University Of Wisconsin-Ma- dison, 2007. [15] W. U. Bajwa, A. M. Sayeed and R. Nowak. “Learning Sparse Doubly-Selective Channels,” 46th Annual Allerton Conference on Communication, Control, and Computing, 2008, pp. 575-582. [16] N. Vaswani, “Kalman Filtered Compressed Sensing,” 15th IEEE International Conference on Image Processing, 2008. ICIP 2008, 2008, pp. 893- 896. [17] N. Vaswani, “Analyzing Least Squares and Kalman Fil- tered Compressed Sensing,” IEEE International Confe- rence on Acoustics, Speech and Signal Processing, 2009. ICASSP, 2009, pp. 3013-3016. [18] http://home.engineering.iastate.edu/~namrata/research/Se quentialCS.htm Copyright © 2013 SciRes. CN
|