S. K. Saha et al. / Natural Science 5 (2013) 27-37
36
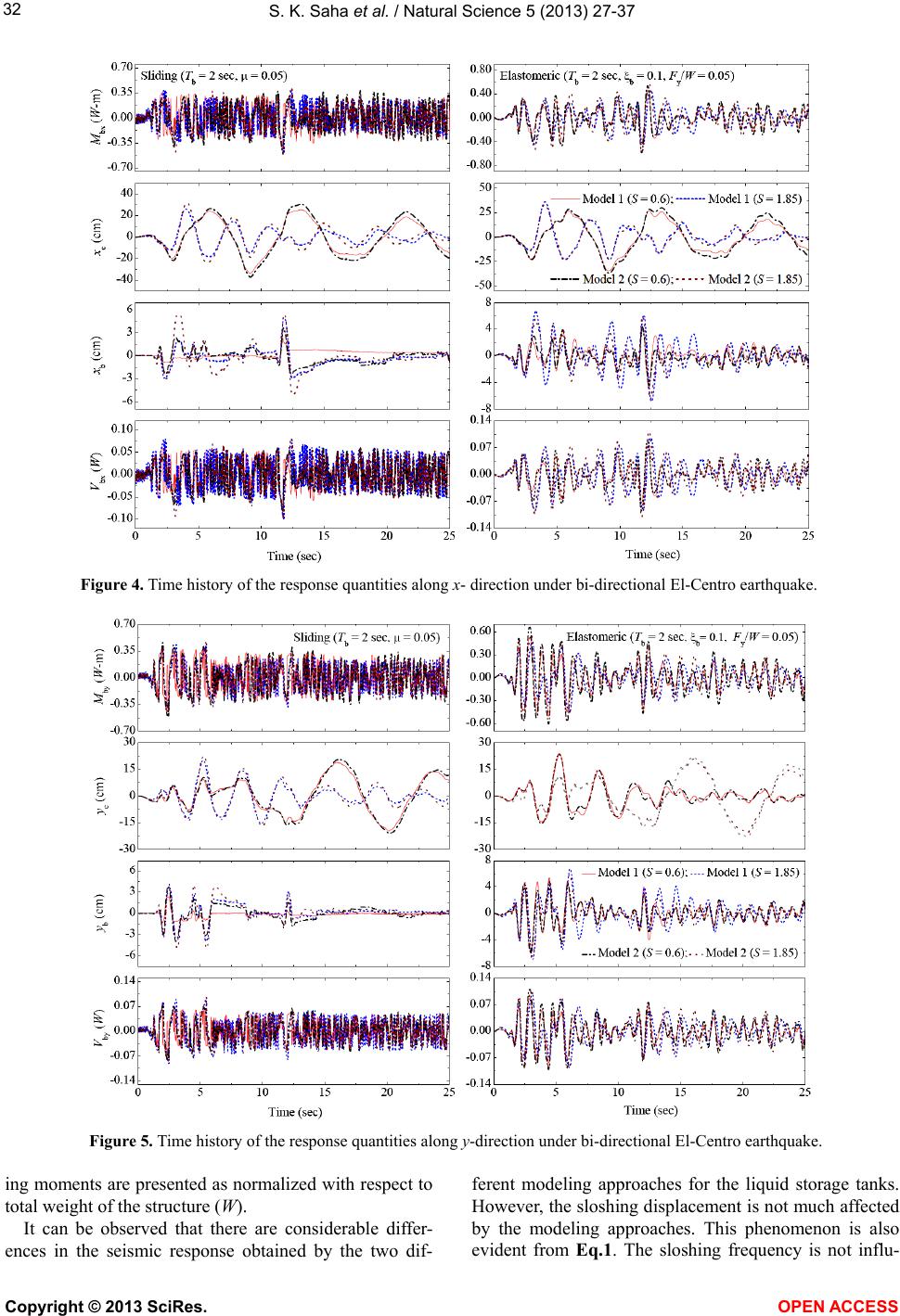
modeling approaches, are not affected for both the tank
configurations. Furthermore, the difference in the seismic
response, obtained through two different modeling ap-
proaches, is more for broad tanks as compared to slender
tanks. It can also be observed that most of the seismic
response quantities are increased when the tank is base-
isolated using sliding system as compared to case when
the tank is base-isolated using elastomeric bearing, ex-
cept the base displacements (xb and yb).
5.2 Effect of Interaction on the Peak
Seismic Response
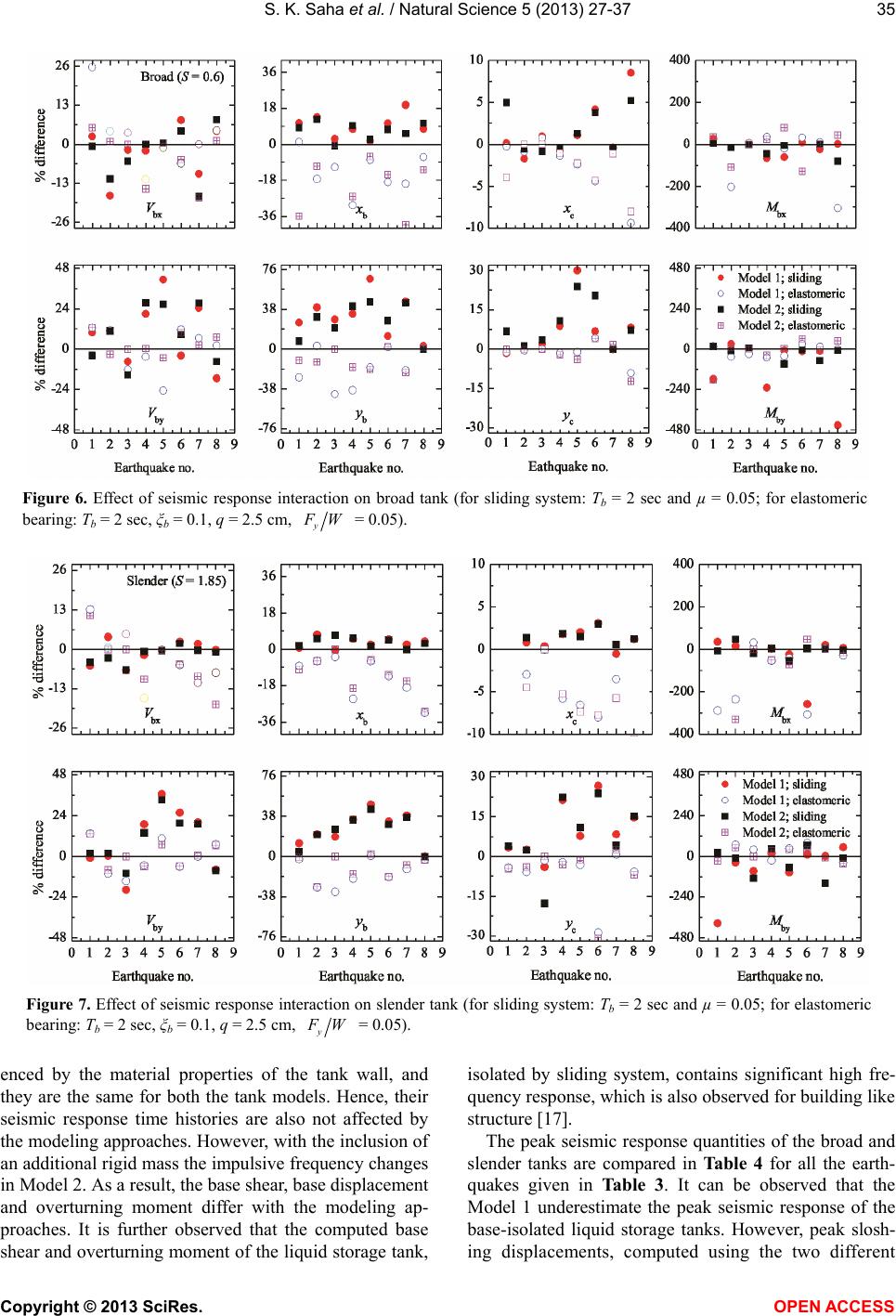
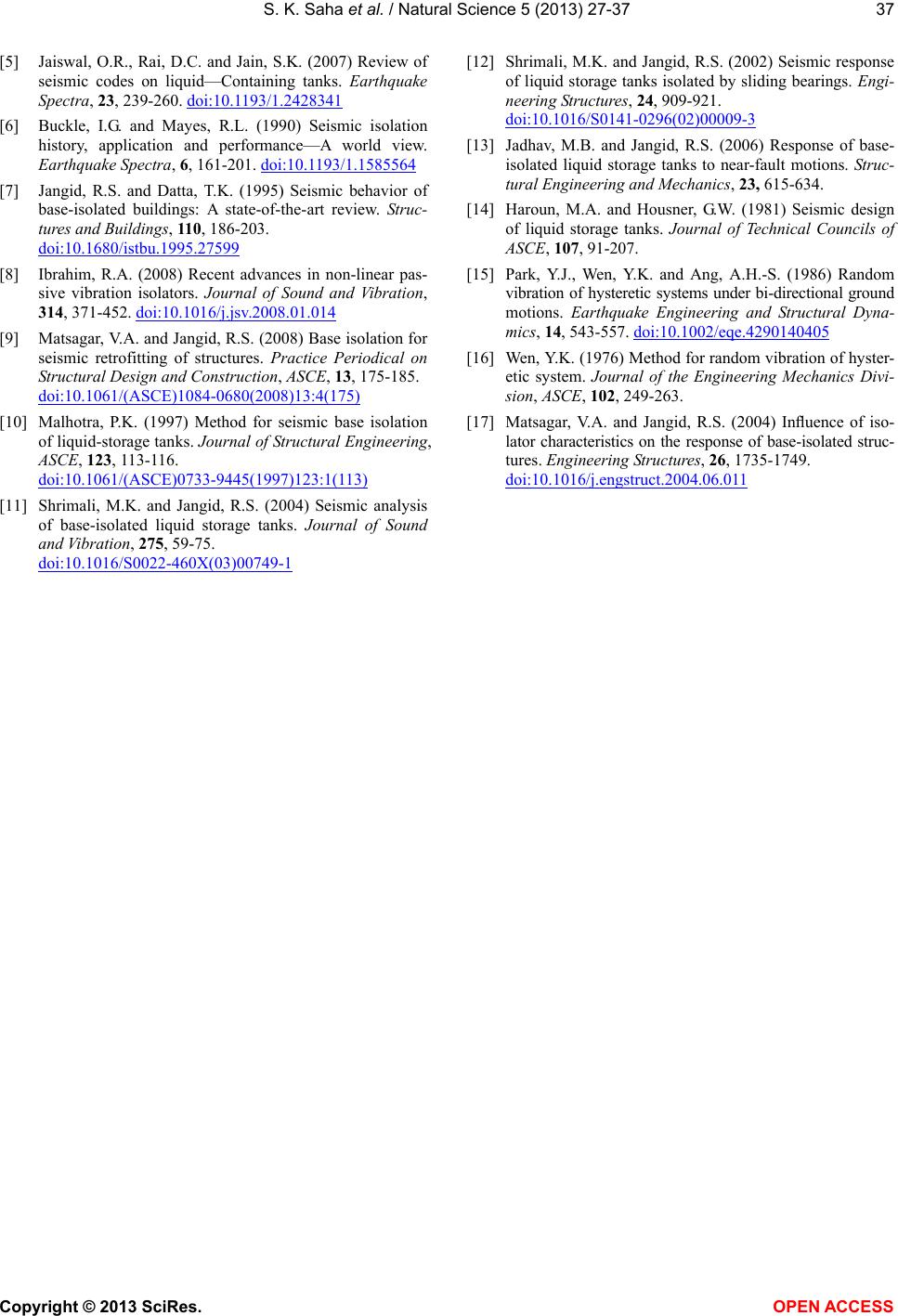
The effect of interaction between two mutually per-
pendicular hysteretic displacement components of the
isolator under bi-directional earthquake excitation is
studied. For the sliding system, the isolation time period
(Tb) is taken as 2 sec and the friction coefficient (µ) is
taken as 0.05. The isolation time period (Tb), the isolation
damping (ξb) and the normalized yield strength (y
W)
of the elastomeric bearing are taken as 2 sec, 0.1 and
0.05, respectively. Two types of tank configurations, such
as broad (S = 0.6) and slender (S = 1.85), are studied.
Figures 6 and 7 show the percentage difference of the
peak seismic response quantities for broad and slender
tank configurations, respectively. For example, % dif-
ference in the base displacement in x-direction (xb) is
calculated as
interaction no-interaction
interaction
% difference in100
bb
b
b
xx
xx
(22)
where, and
indicates the peak
interaction
b
xno-interaction
b
x
base displacement when interaction is considered and not
considered, respectively. Here, zero percentage indicates
that there is no effect of interaction on the seismic re-
sponse. A negative percentage indicates that the peak
seismic response is more when response interaction is
not considered.
It is observed that both the models of the base-isolated
liquid storage tanks are showing similar trend to predict
the effect of response interaction of broad and slender
tanks. It is also observed that the effect of interaction is
most significant for base displacement. Sloshing dis-
placement is less affected by the interaction. Base shear
and overturning moment are also influenced by the con-
sideration of the interaction. The effect of the interaction
in bi-directional seismic response is observed to be mar-
ginally more in the broad tanks as compared to the slen-
der tanks, and the seismic response along y- direction is
more influenced by the interaction than along x-direc-
tion. It is further observed that the consideration of the
interaction affect the seismic response differently in case
of sliding system and elastomeric bearing. The effect of
interaction in case of the sliding system is more pro-
nounced than in case of the elastomeric bearing. For
sliding system, the base displacement increases when the
interaction is considered. However, for elastomeric bear-
ing interaction reduces the base displacement.
6. CONCLUSIONS
Seismic response of base-isolated liquid storage tanks
is investigated under bi-directional earthquakes. The liq-
uid storage tank is modeled using a) two mass and b)
three mass mechanical analogs. Two different isolation
systems, namely sliding system and elastomeric bearing,
are considered. A comparison of the important response
quantities, obtained through two different modeling ap-
proaches of the tank, is carried out. The effects of the
interaction, between the two mutually perpendicular
hysteretic displacement components of the isolator, on
the response, are also studied. Following are the major
conclusions drawn from the present study.
1) The two-mass model (Model 1) and three-mass
model (Model 2) of the base-isolated liquid storage tanks
estimate almost the same sloshing displacement. How-
ever, base shear, base displacement and overturning
moment are underestimated by the two-mass model as
compared to the three-mass model.
2) The base shear and overturning moment of the liquid
storage tank, isolated by sliding system, contains signifi-
cant high frequency components.
3) The difference in the peak response, obtained
through Model 1 and Model 2, is more for broad tanks.
4) Peak seismic response quantities, except base dis-
placements, are increased when the tank is base-isolated
using sliding system as compared to case when the tank
is base-isolated using elastomeric bearing.
5) Consideration of interaction between two mutually
perpendicular hysteretic displacement components of the
isolator significantly affects the peak response of the
base-isolated liquid storage tanks.
6) Effect of the interaction under bi-directional earth-
quake is predicted similarly by the Model 1 and Model 2.
REFERENCES
[1] ACI 350.3 (2006) Seismic design of liquid containing
concrete structures. American Concrete Institute, Farm-
ington Hills.
[2] API 650 (1998) Welded storage tanks for oil storage.
American Petroleum Institute Standard, Washington DC.
[3] AWWA D-100 (1996) Welded steel tanks for water stor-
age. American Water Works Association, Colorado.
[4] Housner, G.W. (1963) The dynamic behavior of water
tanks. Bulletin of Seismological Society of America, 53,
381-387.
Copyright © 2013 SciRes. OPEN ACCESS