 Journal of Global Positioning Systems (2003) Vol. 2, No. 2: 100-108 Datum Definition in the Long Range Instantaneous RTK GPS Network Solution Israel Kashani1,2, Pawel Wielgosz1,3, Dorota Grejner-Brzezinska1 1 The Ohio State University, CEEGS, 470 Hitchcock Hall, 2070 Neil Avenue, Columbus, OH 43210-1275 e-mail: kashani.1@osu.edu, tel.: 614-292-0169, fax: 614-292-2957 2 Technion - Israel Institute of Technology 3 University of Warmia and Mazury in Olsztyn, Poland Received: 17 October 2003 / 16 December 2003 Abstract. This paper presents the multiple reference station approach to wide area (and regional) instantaneous RTK GPS, implemented in the MPGPSTM (Multi Purpose GPS Processing Software) software, developed at the Ohio State University. A weighted free- net approach (WFN) was applied in the instantaneous RTK software module, which enabled optimal estimation of the rover coordinates, properly reflecting the accuracies of the observations and the coordinates of the CORS stations. The effect of using the distance- dependent weighting scheme in the WFN approach on the final rover solution is analyzed. The influence of the different weights was studied by introducing the distance-dependent weights as a function of the CORS station separation L to the rover (1/L2). The results show that almost 100% of the differences between the computed horizontal rover coordinates and the known reference coordinates are below a decimeter, and 95% of the differences in the vertical coordinate are below 20 cm, when using the suggested approach. In addition, the accuracy analysis of two other solutions, with different datum definition (minimum constraint and over- constrained), is presented. This analysis verifies the suitability of the stochastic models used in the RTK module and the rigorous approach, taking into account inter-baseline correlation as well as the correlation in- between each baseline component. 1 Introduction 1.1 RTK GPS Positioning The most challenging mode among all the kinematic GPS techniques is long range instantaneous RTK, while no data accumulation is made throughout the adjustment process. With longer distances to the reference stations, the RTK technology faces great challenges, since many distance-dependent biases (atmospheric, orbital errors, etc.) need to be precisely modeled. If not properly accommodated, these effects may seriously corrupt the positioning and time transfer results. The success of precise GPS positioning over long baselines depends on the ability to resolve the integer phase ambiguities when short observation time spans are required, which is especially relevant to RTK applications (IAG SSG 1.179, 2000-2003). Instantaneous ambiguity resolution has several advantages over the on-the-fly (OTF) method; it is resistant to negative effects of cycle slips and can provide immediate centimeter level positioning accuracy without any delay needed for initialization as required by the OTF technique (Pratt et al., 1998). However, the ambiguity resolution can only be achieved if the atmospheric, orbital and timing errors are properly accounted for. Over the past few years, the use of a GPS reference station network approach has shown great promise in extending the inter-receiver separation. The implementation of multiple reference stations in a permanent array offers several advantages over the standard single-baseline approach. It improves the accuracy of the mobile receiver and makes the results less sensitive to the length of the rover-reference baselines (Chen et al., 2000; Dai et al., 2001; Cannon et al., 2001). Consequently, the precision of the baseline components, Key words: RTK, GPS, Datum Definition Some results presented here were reported at ION GNSS 2003, Portland, OR 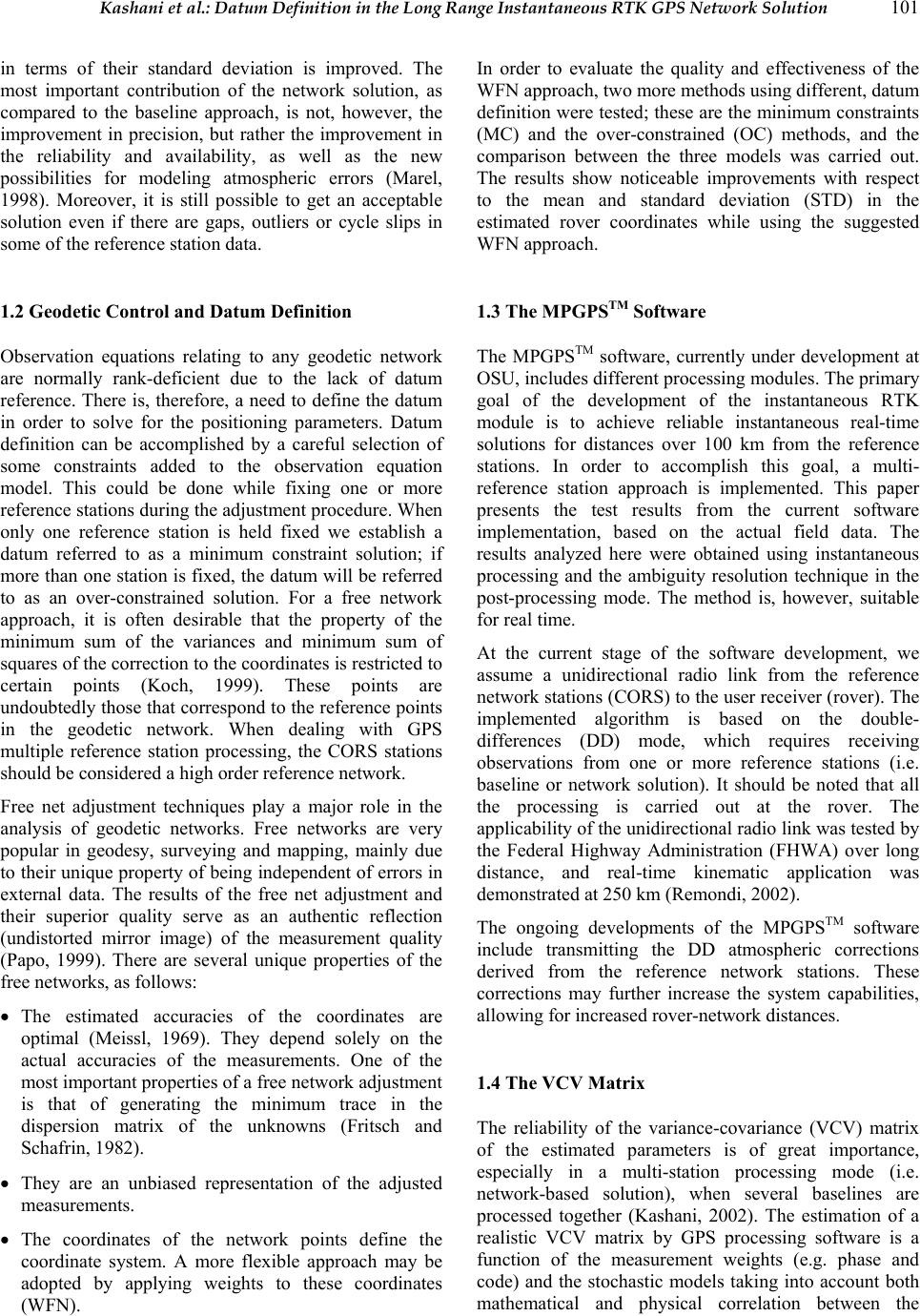 Kashani et al.: Datum Definition in the Long Range Instantaneous RTK GPS Network Solution 101 in terms of their standard deviation is improved. The most important contribution of the network solution, as compared to the baseline approach, is not, however, the improvement in precision, but rather the improvement in the reliability and availability, as well as the new possibilities for modeling atmospheric errors (Marel, 1998). Moreover, it is still possible to get an acceptable solution even if there are gaps, outliers or cycle slips in some of the reference station data. 1.2 Geodetic Control and Datum Definition Observation equations relating to any geodetic network are normally rank-deficient due to the lack of datum reference. There is, therefore, a need to define the datum in order to solve for the positioning parameters. Datum definition can be accomplished by a careful selection of some constraints added to the observation equation model. This could be done while fixing one or more reference stations during the adjustment procedure. When only one reference station is held fixed we establish a datum referred to as a minimum constraint solution; if more than one station is fixed, the datum will be referred to as an over-constrained solution. For a free network approach, it is often desirable that the property of the minimum sum of the variances and minimum sum of squares of the correction to the coordinates is restricted to certain points (Koch, 1999). These points are undoubtedly those that correspond to the reference points in the geodetic network. When dealing with GPS multiple reference station processing, the CORS stations should be considered a high order reference network. Free net adjustment techniques play a major role in the analysis of geodetic networks. Free networks are very popular in geodesy, surveying and mapping, mainly due to their unique property of being independent of errors in external data. The results of the free net adjustment and their superior quality serve as an authentic reflection (undistorted mirror image) of the measurement quality (Papo, 1999). There are several unique properties of the free networks, as follows: • The estimated accuracies of the coordinates are optimal (Meissl, 1969). They depend solely on the actual accuracies of the measurements. One of the most important properties of a free network adjustment is that of generating the minimum trace in the dispersion matrix of the unknowns (Fritsch and Schafrin, 1982). • They are an unbiased representation of the adjusted measurements. • The coordinates of the network points define the coordinate system. A more flexible approach may be adopted by applying weights to these coordinates (WFN). In order to evaluate the quality and effectiveness of the WFN approach, two more methods using different, datum definition were tested; these are the minimum constraints (MC) and the over-constrained (OC) methods, and the comparison between the three models was carried out. The results show noticeable improvements with respect to the mean and standard deviation (STD) in the estimated rover coordinates while using the suggested WFN approach. 1.3 The MPGPSTM Software The MPGPSTM software, currently under development at OSU, includes different processing modules. The primary goal of the development of the instantaneous RTK module is to achieve reliable instantaneous real-time solutions for distances over 100 km from the reference stations. In order to accomplish this goal, a multi- reference station approach is implemented. This paper presents the test results from the current software implementation, based on the actual field data. The results analyzed here were obtained using instantaneous processing and the ambiguity resolution technique in the post-processing mode. The method is, however, suitable for real time. At the current stage of the software development, we assume a unidirectional radio link from the reference network stations (CORS) to the user receiver (rover). The implemented algorithm is based on the double- differences (DD) mode, which requires receiving observations from one or more reference stations (i.e. baseline or network solution). It should be noted that all the processing is carried out at the rover. The applicability of the unidirectional radio link was tested by the Federal Highway Administration (FHWA) over long distance, and real-time kinematic application was demonstrated at 250 km (Remondi, 2002). The ongoing developments of the MPGPSTM software include transmitting the DD atmospheric corrections derived from the reference network stations. These corrections may further increase the system capabilities, allowing for increased rover-network distances. 1.4 The VCV Matrix The reliability of the variance-covariance (VCV) matrix of the estimated parameters is of great importance, especially in a multi-station processing mode (i.e. network-based solution), when several baselines are processed together (Kashani, 2002). The estimation of a realistic VCV matrix by GPS processing software is a function of the measurement weights (e.g. phase and code) and the stochastic models taking into account both mathematical and physical correlation between the  102 Journal of Global Positioning Systems measurements. While the mathematical correlation can be easily modeled, the physical correlation, unfortunately, is more complicated to model. Consequently, if simplified stochastic models are used, overly optimistic statistics might result even in more comprehensive software, which processes the measurements in a multi-station mode, and produce a fully populated VCV (i.e. considering the between baselines mathematical correlation). VCV matrices derived from a number of the existing GPS software might not be realistic, especially in the case of commercial packages (Howind et al., 1999). The practical implication is that the produced accuracies are too good, while the derived coordinates are in fact less accurate. Therefore, a wrong decision could be made, based on the software-derived accuracies, that the solution the software presents is reliable and acceptable. The majority of the GPS processing software packages consider the VCV matrix of the observations to be either diagonal - i.e., no correlation is considered, or block diagonal - i.e., only the mathematical correlation is considered (El-Rabbany et al., 2003). All the modules in the MPGPSTM software include rigorous stochastic models. The stochastic model used in the network-based RTK module, which is based on DD measurements, includes the inter-baseline mathematical correlation (i.e., fully populated matrix). Even though, the physical correlations are not taken into account, the presented accuracy analysis indicates that the VCV matrix seems realistic, rendering convincing coordinate standard deviations. 2 Methodology In this section, the review of the parameter estimation procedure based on the model of DD GPS observations is given, with a particular emphasis on different network adjustment strategies. In general, the instantaneous RTK software Module consists of three major steps as presented by Kashani et al. (2003): 1. Float solution - based on network adjustment. 2. Integer ambiguity estimation - using the classical wide-lane and 60/77 search algorithm. 3. Fixed solution - network adjustment introducing the fixed ambiguities. The parameter estimation is carried out by the least- squares principle. An elevation-depended stochastic model (weighting scheme) and mathematical correlation including inter-baseline and baseline-component correlations were taken into account and applied in the algorithm. In addition, a fast Cholesky decomposition was applied during the adjustment process. The network solution was performed including all the independent baselines in the network (i.e. from all the reference stations to the rover). 2.1 Instantaneous RTK 2.1.1 Float Network Solution The instantaneous RTK algorithm requires the use of both the pseudo-range and phase observations due to the low redundancy. Hence, the DD observation equations for the GPS measurements are as follows: 1,1 1, 22 2,122 2, 1, 22 2,1 2 (/) (/) klklkl klkl ijij ijijij klkl klklkl ijij ijijij klklkl kl ijij ijij klkl klkl ijij ijij TI N TffI N PTI PTffI Φρ λ Φρ λ ρ ρ =+− + =+− + =++ =++ (1) Where: , kl nij DD phase observation on frequency n (n=1,2) , kl nij P DD code observation on frequency n kl ij DD geometric distance kl ij T DD tropospheric delay kl ij DD ionospheric delay 12 ,ff first and second GPS frequencies while i,j denote the two receivers and k,l the two satellites. The Modified Hopfield model was used to calculate the tropospheric DD corrections (T), and the DD ionospheric delay ( kl ij kl ij ) parameters were estimated in the adjustment procedure. Thus, the adjustment model becomes a simple one including only three types of unknowns: rover coordinates (and some reference station coordinates in the MC and the WFN), DD ambiguities, and the DD ionospheric delay parameters. The system of observation equations, which after linearization with respect to the unknown parameters gives the linear system of equations, is presented in equation (2): VLAX = (2) Where: L Measured minus computed measurement V Measurement corrections  Kashani et al.: Datum Definition in the Long Range Instantaneous RTK GPS Network Solution 103 A Design matrix relating measurements and coordinates 11,2, 21, ˆˆ () ˆˆ (6077 ) kl kl ij ij kl kl ij ij Kround NN K round NN =− =− 2, X Corrections to the approximate unknowns This approach deals with the DD code and phase measurements from one pair of satellites and receivers at a time that we call “one at a time” approach. Thus, at this stage the network was decomposed to individual DD pairs in order to fix the ambiguities. Although only a particular combination yields the correct integer solution for the two ambiguity sets, the 1 and 2 values may not be free of errors. Consequently, not all of the ambiguities can be recovered to their correct integer values, especially for longer baselines. However, in the test data analyzed here, almost all the ambiguities (96%) were successfully fixed to their integer values. Since the primary objective of this paper is the demonstration and performance of the WFN approach, we do not concentrate on the ambiguity search and validation techniques here, but rather on the practically achievable accuracy within the current software/algorithmic configuration. The unknown parameters X and the corresponding design matrix A could be subdivided with respect to the unknown ambiguities and the remaining parameters (i.e., the baseline components and the ionospheric delay parameters), as follows: 112 2 VLAx Ax+= + (3) Where 1 and the corresponding design matrix 1 refer to the ambiguities; 2 and the corresponding design matrix 2 refer to the remaining parameters. As a result of the float network solution, real valued estimates for both the ambiguities and the baseline components are obtained, together with their corresponding VCV matrices. Following Teunissen (1998), the resulting float network adjustment solution and its VCV matrix will be: 112 21 2 ˆˆˆ 1 ˆˆ ˆ 2 ˆ; ˆ xxx xx x QQ x xQQ (4) 2.1.3 Fixed Solution Once the fixed solution 1 has been obtained, as described in the previous section, the ambiguity residuals (1 ˆ -1 ) are used to correct the float solution 2 in order tofinal positioning solution for the rover, prod 22 ˆ uce the 1 () xx , shown in equation (6) (Teunissen 1998): The solution of the integer least-squares problem is denoted as 1 and 2 ; the corresponding float solution is denoted as 1 ˆ and2 ˆ ; 1 ˆ Q is the VCV matrix of1 ˆ ; 2 ˆ Q is the VCV matrix of2. ˆ 12 1 1 ˆˆˆ 221 211 ˆˆ ˆ ()( ) xx x xxxQQxx − ==− − (6) 2.1.2 Wide-Lane Ambiguity Search This equation refers to the relationship between the float and the fixed solutions. It shows how the deference between these two rover coordinate estimates depends on the difference between the real-valued least squares ambiguity estimates, 1 ˆ , and the integer least-squares ambiguity estimate,1 . In order to get the VCV matrix of 2 1 ˆ one should apply the law of error propagation to (6) as follows: At this stage of the algorithm, the real-valued ambiguities 1 ˆ , denoted as and , from the float network solution are fixed to their integer values, 1, ˆkl ij N2, ˆkl ij N 1 , designated as and . This step follows the classical wide- lane and 60/77 search method with the integer approximation on baseline-by-baseline basis (Yang et al., 1994): 1, kl ij N 2, kl ij N 221212 1 ˆˆˆˆˆ xxxxx QQQQQ − =− x (7) 2,1 2 1,2, 1 (60) /17 kl ij kl kl ij ij NKK NNK =− =+ (5) 2.2 Free-Net Adjustment Approach Where: The mathematical model of n measurements, which produces a set of n observation equations linearized at the approximated values of the coordinates, is given in equation (2). The basis of the null space of A (Papo, 1, kl ij N and are the integer ambiguities from the center of the search space. 2, kl ij N  104 Journal of Global Positioning Systems According to Wolf (1977), any two X vectors, which pertain to two different datums - for example, Xm and Xk, - are related through the following simple equation: 1987), known also as the Helmert transformation matrix E, has the following important property: 0AE = (8) Datum based on selected m points is defined by subjecting the vector X in (2) to the following linear constraints (Papo and Perelmuter, 1981; Papo, 1986; Papo, 1989): 0 TT mm EPXE X== (9) where: mm EP=E m and T mm PP= mk k XEt + (12) where tkm is a d vector containing transformation parameters from the k - to the m - datum. The solution for tkm is derived from (12) under the minimum condition (10), as follows (Wolf, 1977 and Papo, 1987): 1 () TT kmmmkm k tEEEXH − =−=− X (13) When using a network-based approach with CORS stations in RTK mode, only the CORS station coordinates should be used to establish a datum, and the solution should be the m-datum one, as presented in equation (9). The Pm diagonal matrix entries include zeros or ones, and define the datum points by setting ones in the correct places. This solution is known as a “Weighted Free Net” (WFN) adjustment. However, the Pm matrix could be populated by different weights for the datum-defining points, such as distance-dependent weights, as presented here. Moreover, any a priori information, such as VCV matrix of the CORS station coordinates, could also replace the respective entries in the Pm matrix (Kashani, 2002). Equation (10) is derived from seeking a minimum of the following quadratic form: min. T m XPX= (10) First, we minimize the VP quadratic form in order to create the set of normal equations: TV NX U= (11) The above set is singular due to the need for datum definition. It can be solved only if we apply at least d independent linear constraints, as the order of the datum defect to X. If, for example, we apply (9) to (11), we will obtain a particular solution denoted as Xm. There is an infinite number of sets of d constraints, which, when applied to (11), will produce different solution vectors X, all of which satisfy the normal equation (11). 3 Experiment 3.1 Data Source The results shown herein were generated from a static network of the Ohio CORS (http://www.dot.state.oh.us/aerial/Cors.asp). In addition to the three reference stations: SIDN, COLB and LEBA from the Ohio CORS, a City of Dayton CORS static station served as a rover. Figure 1 shows the test network with the analyzed baselines marked. All the stations were equipped with TRIMBLE 5700 high quality geodetic receivers and antennas. The reference stations were equipped with choke-ring GPS antennas, and the Dayton station was connected to a geodetic antenna. Let us consider one particular branch of such solutions, which is characterized by the contents of the Pm weight matrix. Out of the multitude of Pm matrices (and respective datums), there is one particular solution, which is unique, since the Pm matrix is equal to the identity matrix. We will denote that unique solution as Xk. In this case, m=k when each of the k points in the network contributes to the datum definition on an equal basis, as Pk=I. Meissl (1969) and Koch (1999) have shown that such a solution, as compared to the rest of the existing solutions, is optimal and unique in the sense that the trace of the VCV matrix is minimum. In addition, it can be shown (Koch, 1999) that Qk, the un-scaled (σ0 2) VCV matrix of X, is the pseudo-inverse of N, known also as the Moore- Penrose inverse of N (Qk = N+). According to Meissl (1969), the above optimal solution is the only one that faithfully reflects the accuracy of the measurements, where all the other (external) sources of error have been effectively filtered out. This reference-rover configuration reflects a possible scenario common in surveying practice. Precise dual frequency data collected on August 03, 2003 at a sampling rate of 30-seconds for 13 hours between 00:00- 13:00 UT were used. A total of 1588 observation epochs with the phase-smoothed code (Springer, 1999) and carrier phase measurements were processed and analyzed. The distances between the reference stations varied from 98 to 121 km, and the distances to the rover ranged from 40 to 100 km. The GPS data were collected under moderate geomagnetic and ionospheric conditions with the maximum Kp value reaching 3+. 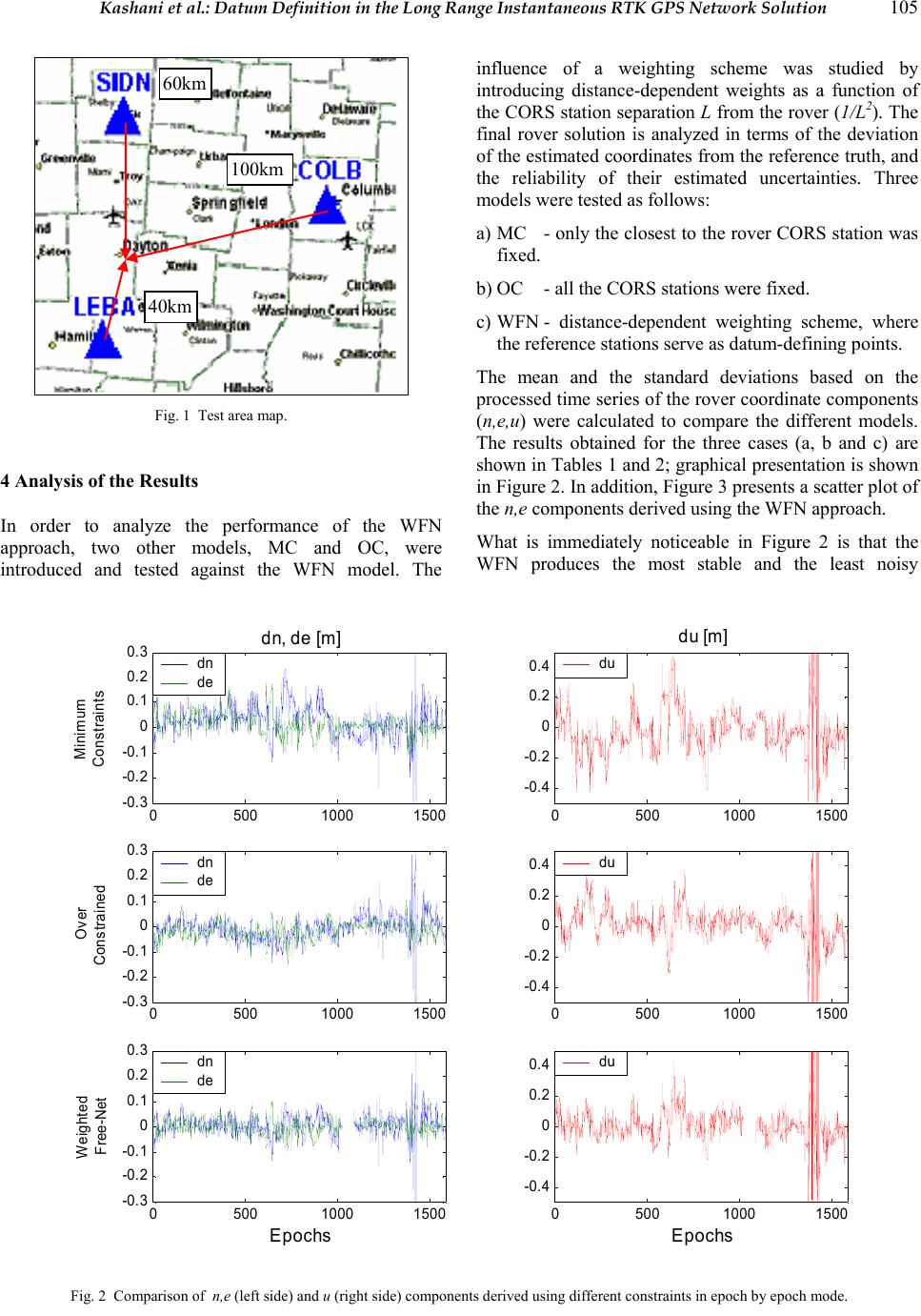 Kashani et al.: Datum Definition in the Long Range Instantaneous RTK GPS Network Solution 105 Fig. 1 Test area map. 4 Analysis of the Results In order to analyze the performance of the WFN approach, two other models, MC and OC, were introduced and tested against the WFN model. The influence of a weighting scheme was studied by introducing distance-dependent weights as a function of the CORS station separation L from the rover (1/L2). The final rover solution is analyzed in terms of the deviation of the estimated coordinates from the reference truth, and the reliability of their estimated uncertainties. Three models were tested as follows: 60km 40km 100km a) MC - only the closest to the rover CORS station was fixed. b) OC - all the CORS stations were fixed. c) WFN - distance-dependent weighting scheme, where the reference stations serve as datum-defining points. The mean and the standard deviations based on the processed time series of the rover coordinate components (n,e,u) were calculated to compare the different models. The results obtained for the three cases (a, b and c) are shown in Tables 1 and 2; graphical presentation is shown in Figure 2. In addition, Figure 3 presents a scatter plot of the n,e components derived using the WFN approach. What is immediately noticeable in Figure 2 is that the WFN produces the most stable and the least noisy 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 dn, de [m] Minimum Constraints 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 Over Const rained 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 Weighted F ree-Net 05001000 1500 -0.4 -0.2 0 0.2 0.4 du [m] 05001000 1500 -0.4 -0.2 0 0.2 0.4 05001000 1500 -0.4 -0.2 0 0.2 0.4 du du du dn de dn de dn de EpochsEpochs Fig. 2 Comparison of n,e (left side) and u (right side) components derived using different constraints in epoch by epoch mode. 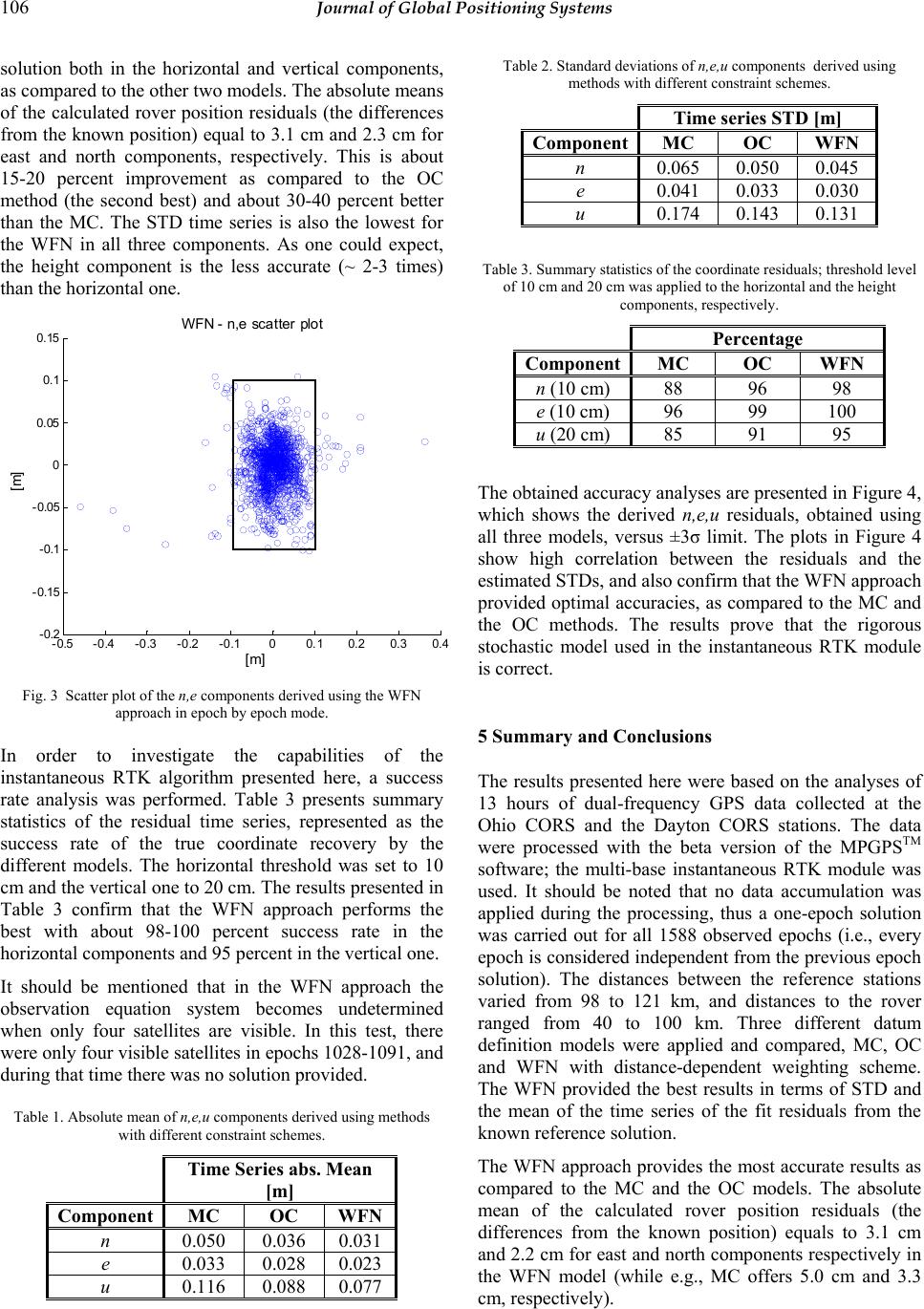 106 Journal of Global Positioning Systems solution both in the horizontal and vertical components, as compared to the other two models. The absolute means of the calculated rover position residuals (the differences from the known position) equal to 3.1 cm and 2.3 cm for east and north components, respectively. This is about 15-20 percent improvement as compared to the OC method (the second best) and about 30-40 percent better than the MC. The STD time series is also the lowest for the WFN in all three components. As one could expect, the height component is the less accurate (~ 2-3 times) than the horizontal one. Table 2. Standard deviations of n,e,u components derived using methods with different constraint schemes. Time series STD [m] ComponentMC OC WFN n 0.065 0.050 0.045 e 0.041 0.033 0.030 u 0.174 0.143 0.131 Table 3. Summary statistics of the coordinate residuals; threshold level of 10 cm and 20 cm was applied to the horizontal and the height components, respectively. -0.5 -0.4 -0.3 -0.2 -0.100.1 0.20.30.4 -0.2 -0.15 -0.1 -0.05 0 0.05 0.1 0.15 WFN - n,e scatter plot [m] [m] Percentage ComponentMC OC WFN n (10 cm) 88 96 98 e (10 cm) 96 99 100 u (20 cm) 85 91 95 The obtained accuracy analyses are presented in Figure 4, which shows the derived n,e,u residuals, obtained using all three models, versus ±3σ limit. The plots in Figure 4 show high correlation between the residuals and the estimated STDs, and also confirm that the WFN approach provided optimal accuracies, as compared to the MC and the OC methods. The results prove that the rigorous stochastic model used in the instantaneous RTK module is correct. Fig. 3 Scatter plot of the n,e components derived using the WFN approach in epoch by epoch mode. 5 Summary and Conclusions In order to investigate the capabilities of the instantaneous RTK algorithm presented here, a success rate analysis was performed. Table 3 presents summary statistics of the residual time series, represented as the success rate of the true coordinate recovery by the different models. The horizontal threshold was set to 10 cm and the vertical one to 20 cm. The results presented in Table 3 confirm that the WFN approach performs the best with about 98-100 percent success rate in the horizontal components and 95 percent in the vertical one. The results presented here were based on the analyses of 13 hours of dual-frequency GPS data collected at the Ohio CORS and the Dayton CORS stations. The data were processed with the beta version of the MPGPSTM software; the multi-base instantaneous RTK module was used. It should be noted that no data accumulation was applied during the processing, thus a one-epoch solution was carried out for all 1588 observed epochs (i.e., every epoch is considered independent from the previous epoch solution). The distances between the reference stations varied from 98 to 121 km, and distances to the rover ranged from 40 to 100 km. Three different datum definition models were applied and compared, MC, OC and WFN with distance-dependent weighting scheme. The WFN provided the best results in terms of STD and the mean of the time series of the fit residuals from the known reference solution. It should be mentioned that in the WFN approach the observation equation system becomes undetermined when only four satellites are visible. In this test, there were only four visible satellites in epochs 1028-1091, and during that time there was no solution provided. Table 1. Absolute mean of n,e,u components derived using methods with different constraint schemes. The WFN approach provides the most accurate results as compared to the MC and the OC models. The absolute mean of the calculated rover position residuals (the differences from the known position) equals to 3.1 cm and 2.2 cm for east and north components respectively in the WFN model (while e.g., MC offers 5.0 cm and 3.3 cm, respectively). Time Series abs. Mean [m] Component MC OC WFN n 0.050 0.036 0.031 e 0.033 0.028 0.023 u 0.116 0.088 0.077 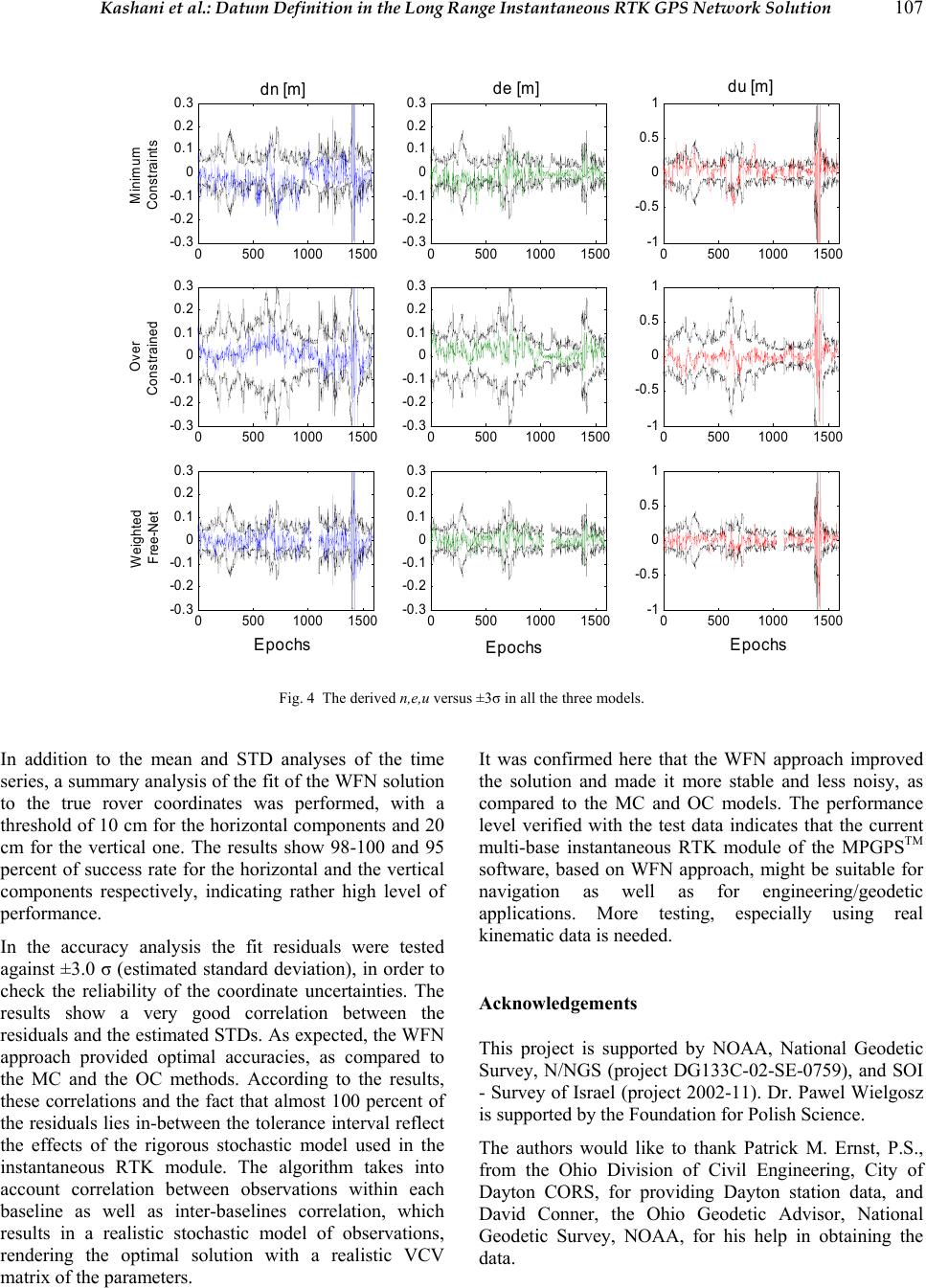 Kashani et al.: Datum Definition in the Long Range Instantaneous RTK GPS Network Solution 107 0500 1000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 dn [m] 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 de [m] 05001000 1500 -1 -0.5 0 0.5 1 du [m] 0500 1000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 05001000 1500 -1 -0.5 0 0.5 1 0500 1000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 05001000 1500 -0.3 -0.2 -0.1 0 0.1 0.2 0.3 05001000 1500 -1 -0.5 0 0.5 1 Minimum Cons traints Over Constrained Weighted Free-Net Epochs Epochs Epochs Fig. 4 The derived n,e,u versus ±3σ in all the three models. In addition to the mean and STD analyses of the time series, a summary analysis of the fit of the WFN solution to the true rover coordinates was performed, with a threshold of 10 cm for the horizontal components and 20 cm for the vertical one. The results show 98-100 and 95 percent of success rate for the horizontal and the vertical components respectively, indicating rather high level of performance. It was confirmed here that the WFN approach improved the solution and made it more stable and less noisy, as compared to the MC and OC models. The performance level verified with the test data indicates that the current multi-base instantaneous RTK module of the MPGPSTM software, based on WFN approach, might be suitable for navigation as well as for engineering/geodetic applications. More testing, especially using real kinematic data is needed. In the accuracy analysis the fit residuals were tested against ±3.0 σ (estimated standard deviation), in order to check the reliability of the coordinate uncertainties. The results show a very good correlation between the residuals and the estimated STDs. As expected, the WFN approach provided optimal accuracies, as compared to the MC and the OC methods. According to the results, these correlations and the fact that almost 100 percent of the residuals lies in-between the tolerance interval reflect the effects of the rigorous stochastic model used in the instantaneous RTK module. The algorithm takes into account correlation between observations within each baseline as well as inter-baselines correlation, which results in a realistic stochastic model of observations, rendering the optimal solution with a realistic VCV matrix of the parameters. Acknowledgements This project is supported by NOAA, National Geodetic Survey, N/NGS (project DG133C-02-SE-0759), and SOI - Survey of Israel (project 2002-11). Dr. Pawel Wielgosz is supported by the Foundation for Polish Science. The authors would like to thank Patrick M. Ernst, P.S., from the Ohio Division of Civil Engineering, City of Dayton CORS, for providing Dayton station data, and David Conner, the Ohio Geodetic Advisor, National Geodetic Survey, NOAA, for his help in obtaining the data.  108 Journal of Global Positioning Systems References Cannon, M.E., G. Lachapelle, P. Alves, L.P. Fortes and B. Townsend (2001) GPS RTK Positioning Using a Regional Reference Network: Theory and Results, Proceedings of 5th GNSS International Symposium, Seville, May 8-11. Chen, H.Y. (2000) An instantaneous ambiguity resolution procedure suitable for medium-scale GPS reference station networks, 13th Int. Tech. Meeting of the Satellite Division of the U.S. Inst. of Navigation, Salt Lake City, Utah, 19-22 September, pp. 1061-1070. Dai, L., J. Wang, C. Rizos and S. Han (2001) Real-time carrier phase ambiguity resolution for GPS/GLONASS reference station networks, Int. Symp. on Kinematic Systems in Geodesy, Geomatics & Navigation (KIS2001), Banff, Canada, 5-8 June, p. 475-481. El-Rabbany, A.E. (2003) Effect of Temporal Physical Correlation on Accuracy Estimation in GPS Relative Positioning, Journal of Surveying Engineering, Vol. 129, No. 1, pp. 28-32. Fritsch, D. and B. Schafrin (1982) The “Choice of Norn” Problem for the Free Net Adjustment with Orientation Parameters, Boll. Geod. Sci. Aff., Vol. 41, pp. 259-282. Howind, J., H. Kutter and B. Heck (1999) Impact of temporal correlation on GPS-derived relative point positions, Journal of Geodesy, 73, pp. 246-258. IAG SSG 1.179, Wide area modeling for precise satellite positioning, Terms of Reference. http://www.gfy.ku.dk/~iag/HB2000/part3/Sec1.htm, last accessed in 2003. Kashani, I., (2002) Geodetic control networks in the era of permanent GPS stations, Ph.D thesis, Technion - Israel Institute of Technology, 165p. Kashani, I., P. Wielgosz and D. Grejner-Brzezinska (2003) Free Net Adjustment in Multi Reference Stations Approach for Instantaneous RTK, Proceedings, ION GPS/GNSS, Sept 9-12, Portland, Oregon, pp. 1390-1396. Koch, K.R. (1999) Parameter Estimation and Hypothesis Testing in Linear Models, Springer Verlag, Berlin Heidelberg New York, 333p. Marel, H. van der (1998) Virtual GPS reference stations in The Netherlands, Proc. of the 11th International Technical Meeting, Algorithms and Methods ION-GPS '98, Nashville, USA, 15-18 September 1998, part I: pp. 49-58. Meissl, P. (1969) Inner Theory of Errors of a Cluster of Points. Annex F in Systematic Investigations of Geodetic Networks in Space, (ed) K. Rinner. Papo, H. and A. Perelmuter (1981) Datum Definition by Free Net Adjustment, Bulletin Geodesique, Vol.55, No.3. Papo, H. (1986) Extended Free Net Adjustment Constraint, NOAA Tech. Rep., NOS 119 NGS 37, Rockville MD. Papo, H. (1987) Bases of Null Space in Analytical Photogrammetry, Photogrammetria, Vol. 41. Papo, H. (1989) Modeling in Non-Cartesian Reference Frames, IAG General Meeting, Edinburgh, Scotland, UK. Papo, H. (1999) Datum Accuracy and its Dependence on Network Geometry, International Scientific and Technical Conference, dedicated to the 220th anniversary of Moscow State University of Geodesy and Cartography, May 24-29, 1999 Pratt, M., B. Burke and P. Misra (1998) Single epoch ambiguity resolution with GPS-GLONASS L1-L2 data, Proc. of the 11th International Technical Meeting, Algorithms and Methods ION-GPS '98, Nashville, USA, pp. 389-398 Remondi, B. W. (2002) Support of the System Test and Analysis Program for the Nationwide Differential Global Positioning System Modernization Program Phase I High Accuracy-Nationwide Differential Global Positioning System Report, FHWA-RD-02-110 (July 2002). http://www.tfhrc.gov/its/ndgps/02110/index.htm. Springer, T.A. (1999) Modeling and Validating Orbits and Clocks Using the Global Positioning System, Ph.D. dissertation, Astronomical Institute, University of Berne, Berne, Switzerland, 155p. Teunissen, P.J.G and A. Kleusberg (Eds.), (1998) GPS for Geodesy, Springer - Verlag Berlin Heidelberg New York, 650p. Yang, M., C. Goad and B. Schaffrin (1994) Real-time on-the- fly ambiguity resolution over short baseline in the presence of anti-spoofing, in Proceedings of ION GPS-94, Salt Lake City, pp. 519-525.
|