130 Journal of Global Positioning Systems
The
δ
(dN) reaches the second minimum at search No.
771. This example shows that the minimum of
δ
(dN) may
not lead to the minimum of total sigma, because the
related
δ
(dY) is large. If the sigma ratio criterion is used
in this case, the LSAS method will reject the found
minimum and explain that no significant ambiguity fixing
can be made. However, because of the uniqueness
principle of the general criterion, the search reaches the
total minimum uniquely.
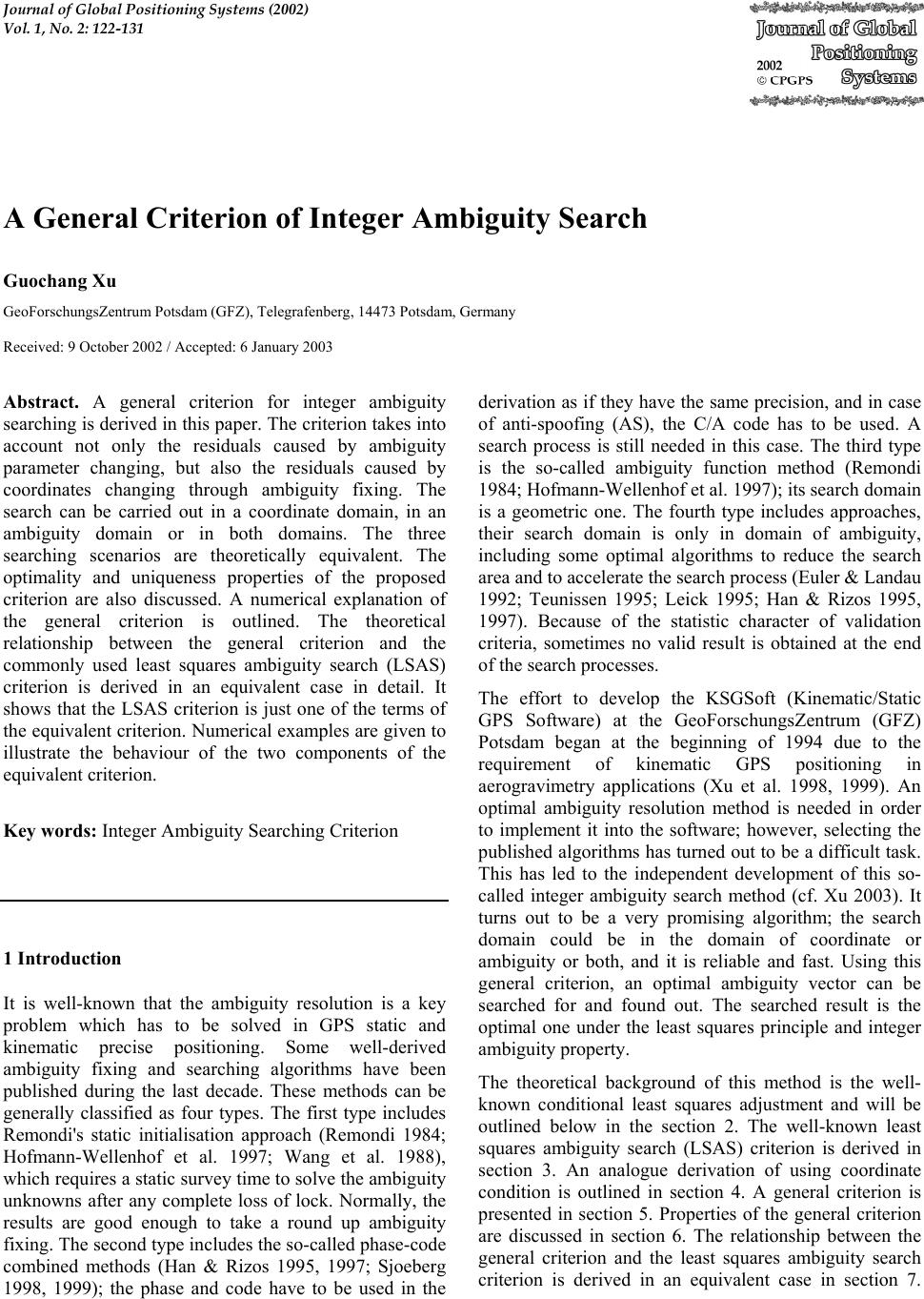
The second example is very similar to the first one. The
sigmas of the search process are plotted in Figure 3,
where
δ
(dY) is much smaller than
δ
(dN).
δ
(dN) reaches
the minimum at the search number 5 and
δ
(dY) at 171.
δ
(total) reaches the minimum at the search number 129.
The total 11 ambiguity parameters are fixed and listed in
Table 2. Two ambiguity fixings have just one cycle
difference at the 6th ambiguity parameter. The related
coordinate solutions after the ambiguity fixings are listed
in Table 3. The coordinate differences at component x
and z are about 5 mm. Even the results are very similar,
however, two criteria do give different results.
Tab. 2 Two kinds of ambiguity fixing due to two criteria
Ambiguity No. 1 2 3 4 5 6 7 8 9 10 11
LSAS fixing 0 0 1 0 0 0 -1 0 0 -1 -1
General fixing 0 0 1 0 0 -1 -1 0 0 -1 -1
Tab. 3 Ambiguity fixed coordinate solutions (in meter)
Coordinates x y z
LSAS fixng 0.2140 -0.0449 0.1078
General fixing 0.2213 -0.0465 0.1127
Tab. 4 Sigmas of ambiguity search process
Search No. δ(dN) δ(dY) δ(total)
1 248.5681 129.0555 377.6236
2 702.6925 58.9271 761.6195
3 889.5496 107.9330 997.4825
4 452.1952 42.3226 494.5178
5 186.7937 112.3030 299.0967
6 739.0487 55.9744 795.0231
7 931.4125 89.9074 1021.3199
8 592.1887 38.0969 630.2856
In the third example, real GPS data of 3 October 1997 at
station Faim (N 38.5295°, E 331.3711°) and Flor (N
39.4493°, E 328.8715°) are used. The sigmas of the
search process are listed in Table 4. Both
δ
(dN) and
δ
(total) reach the minimum at the search number 5. This
indicates that the LSAS criterion may sometimes reach
the same result as that of the equivalent criterion being
used.
9 Conclusions and Comments
1). Conclusions
A general criterion of integer ambiguity search is
proposed in this paper. The search can be carried out in a
coordinate domain, in an ambiguity domain or in both
domains. The criterion takes the both coordinate and
ambiguity residuals into account. The equivalency of the
three searching processes are proved theoretically. The
searched result is optimal and unique under the least
squares minimum principle and under the condition of
integer ambiguities. The criterion has a clear numerical
explanation. The theoretical relationship between the
general criterion and the common used least squares
ambiguity search (LSAS) criterion is derived in detail. It
shows that the LSAS criterion is just one of the terms of
the equivalent criterion of the general criterion (does not
take into account the coordinate change due to the
ambiguity fixing). Numerical examples shown that, a
minimum δ(dN) may have a relatively large δ(dY), and
therefore a minimum δ(dN) may not guarantee a
minimum δ(total).
2). Comments
The float solution is the optimal solution of the GPS
problem under the least squares minimum principle.
Using the general criterion, the searched solution is the
optimal solution under the least squares minimum
principle and under the condition of integer ambiguities.
However, the ambiguity searching criterion is just a
statistic criterion. Statistic correctness does not guarantee
correctness in all applications. Ambiguity fixing only
makes sense when the GPS observables are good enough
and the data processing models are accurate enough.
References
Cui, X.; Yu, Z.; Tao, B.; Liu, D. (1982): Adjustment in
Surveying, Surveying Publishing House, Peking
Euler, H.J.; Landau, H. (1992): Fast GPS ambiguity resolution
on-the-fly for real-time applications. Proceedings of 6th
Int. Geod. Symp. on satellite Positioning. Columbus, Ohio,
17-20.
Gotthardt, E. (1978): Einfuehrung in die
Ausgleichungsrechnung, Herbert Wichmann Verlag
Karlsruhe
Han, S.; Rizos, C. (1995): On-The-Fly Ambiguity Resolution
for Long Range GPS Kinematic Positioning, IAG
Symposia 115, edited by Beutler, Hein, Melbourne and
Seeber.
Han, S.; Rizos, C. (1997): Comparing GPS Ambiguity
Resolution Techniques, GPS World, Oct. 1997, 54-61
Hofmann-Wellenhof, B; Lichtenegger, H.; Collins, J. (1997):
GPS Theory and Practice, Springer-Verlag, Wien