46 Journal of Global Positioning Systems
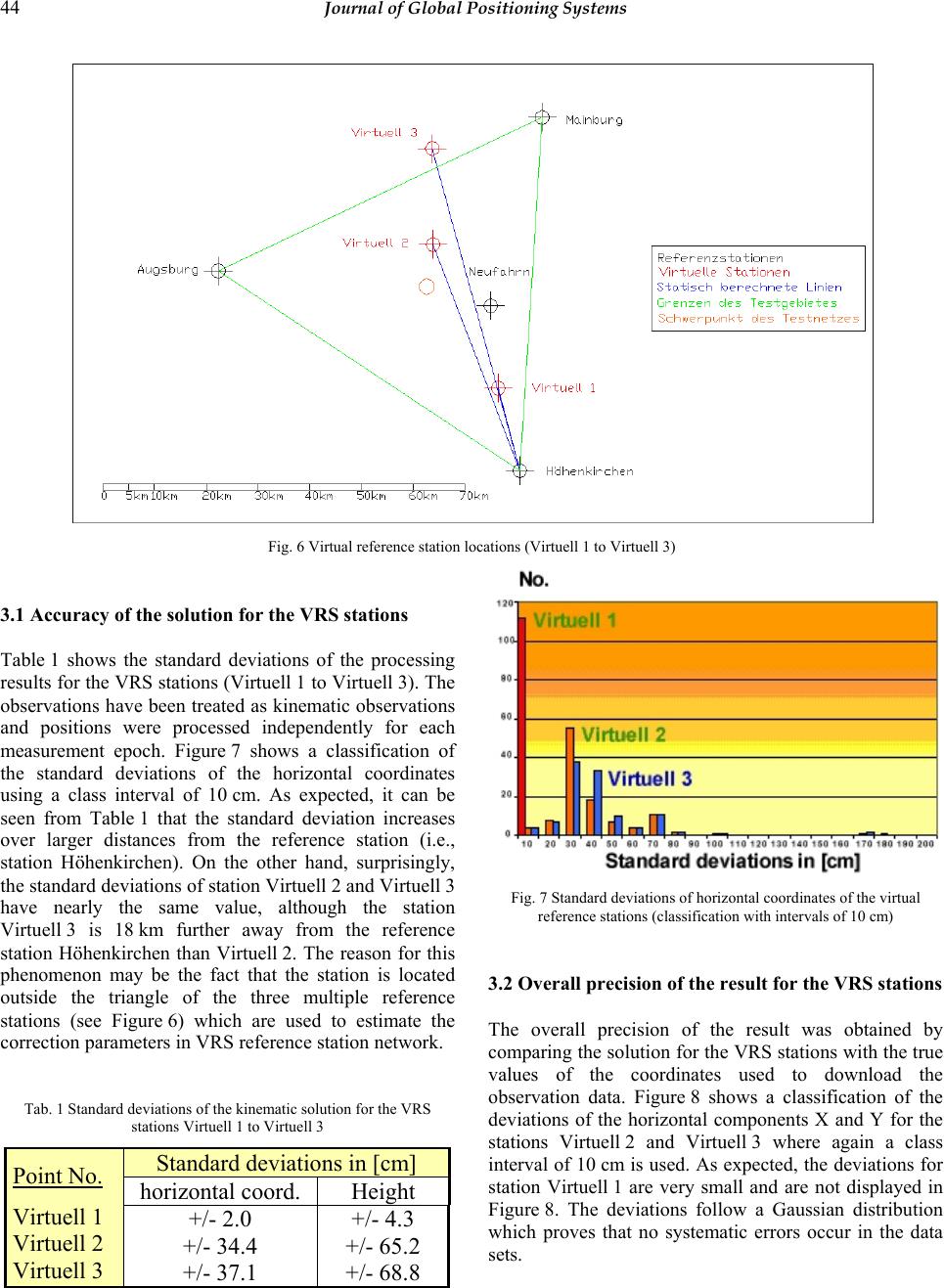
height component, however, are much smaller. The
reason for this may be the fact that a larger number of
RTK results are available which are used to calculate
the standard deviation as the length of the observation
period was about 90 hours.
Tab. 2 Comparison of the standard deviations of four VRS stations
Standard deviations in [cm] of the differences
at a probability level of 99%
Distance to the
network center point
Point No.
X Y H
8km Virtuell 2 <2.2 <2.9 <13.1
13km Neufahrn <2.6 <2.1 < 4.9
24km Virtuell 1 <1.6 <0.4 <10.1
27km Virtuell 3 <2.3 <2.9 <13.0
• The achievable precision for the horizontal component
of the solutions are always within ± 5 cm, even for
baseline length up to 35 km. Also for the height good
results can be obtained where as usual the standard
deviations are larger by a factor of 1.5 to 2 compared to
the horizontal component. Therefore our tests could
prove that a high precision increase can be achieved
due to the employment of network station concepts.
4 CONCLUSIONS
Using the VRS station concept, similar accuracies can be
achieved in distances of up to 35 km from the nearest
reference station as for short baselines in the single
reference station concept. Therefore the distances
between the reference stations in a LADGPS network can
be enlarged to 70 to 80 km which would result in large
cost savings for the establishment and a maintenance of
the permanent DGPS network. A further advantage of the
VRS concept is that in the rover receiver standard RTK
processing algorithms are employed and no modification
of the receiver hardware or software is required. The
communication link is performed using common mobile
phone data links. Due to high density of mobile
transmitters in Europe nearly a full coverage of most
areas is guaranteed. For a global use of the data
communication, however, a modification of the
commonly used RTCM data protocol is still required. It
can be expected that this problem will be solved soon.
New networks in Austria, e.g. a new permanent DGPS
network for Vienna which will be established by the
power supply company Wienstrom, will employ the most
advanced VRS station concept.
REFERENCES
Ahrer, H. & Auzinger, T.: Der österreichische DARC-DGPS
Dienst. in: Papers presented at the „10. Internationale
geodätische Woche Obergurgl“, 21-27 February, 1999,
(German). http://info.uibk.ac.at/c/c8/c802/obg99/ahrer.
html (Last visited: May, 2001)
Ashkenazi, V.; Chao, C. H. J.; Chen, W.; Hill, C. J. & Moore,
T.: A New High Precision Wide Area DGPS System. The
Journal of Navigation, Vol. 50, No. 1, January 1997, pg.
109-119.
Chao, C. H. J.: An Integrated Algorithm for Effective Orbit
Determination. The Geomatics Journal of Hong Kong,
Vol. 1, No. 1, July, 1997, pg. 53-62.
Chao, C. H. J. & Ding, X.: Single Frequency Ionospheric
Modelling for Wide Area Differential GPS. in: Papers
presented at the XXI International Congress FIG’98,
Brighton, UK, July 19-26, 1998.
Kaplan E. D.: Understanding GPS – Principles and
Applications. Artech House Publishers, Boston, London,
1996.
Kleusberg, A.: Atmospheric Models for GPS. in: Teunissen, P.
J. G. & Kleusberg, A. (Eds.): Chapter 15 of the book GPS
for Geodesy, Springer Verlag, Berlin, Heiddelberg, New
York, 1998, pg. 599-624.
Klobuchar, J. A.: Design and Characteristics of the GPS
Ionospheric Time Delay Algorithm for Single Frequency
Users. in: Proceedings of the PLANS-86 conference, Las
Vegas, 1986, pg. 280-286.
Landau, H.: Zur Qualitätssicherung in GPS
Referenzstationsnetzen, Paper presented at the XXIII
Course of Engineering Surveying, Munich, March 13-17,
Verlag Konrad Wittwer, Stuttgart, pp. 277-290 (German).
Moser, R.: Untersuchung und Vergleich von Local Area und
Wide Area DGPS Diensten. Diploma thesis, Department
of Applied and Engineering Geodesy, Vienna University of
Technology, 2001 (German).
Retscher, G.: RTK-GPS Positioning and Navigation in Marine
Geodesy. The Geomatics Journal of Hong Kong, No. 2,
1999, pp. 39-48.
Retscher, G. &. Chao, C. H. J.: Precise Real-time Positioning in
WADGPS Networks. GPS Solutions, Vol. 4, No. 2, Fall
2000, pp. 68-75.