Septic B-Spline Solution of Fifth-Order Boundary Value Problems ()
Received 8 July 2016; accepted 6 August 2016; published 9 August 2016

1. Introduction
Consider the following fifth-order boundary value problem.
 (1)
(1)
With boundary conditions
 (2)
(2)
where  are known real constants,
are known real constants,  and
and  are continuous on
are continuous on . This problem arising in the mathematical modeling of viscoelastic flows [1] [2] has been studied by several authors [3] - [5] . A. Lamnii, H. Mraoui, D. Sbibih and A. Tijini studied the fifth-order boundary value problem based on splines quasi-interpolants and proved to be second order convergent.
. This problem arising in the mathematical modeling of viscoelastic flows [1] [2] has been studied by several authors [3] - [5] . A. Lamnii, H. Mraoui, D. Sbibih and A. Tijini studied the fifth-order boundary value problem based on splines quasi-interpolants and proved to be second order convergent.
B-spline functions based on piece polynomials are useful wavelet basis functions, the resulting matrices are sparse, but always, banded. And that possess attractive properties: piecewise smooth, compact support, symmetry, rapidly decaying, differentiability, linear combination, B-splines were introduced by Schoenberg in 1946 [6] . Up to now, B-spline approximation method for numerical solutions has been researched by various researchers [7] - [14] .
In this paper, the septic B-spline function is used as a basis function and the B-spline collocation method is studied to solve the linear and nonlinear fifth-order boundary value problems. The method is fourth order convergent. We use the quesilinearization technique to reduce the nonlinear problems to linear problems. The present method is tested for its efficiency by considering two examples.
2. Septic B-Spline Interpolation
An arbitrary Nth order spline function with compact support of N. It is a concatenation of N sections of (N-1)th order polynomials, continuous at the junctions or “knots”, and gives continuous (N-1)th derivatives at the junctions.
Let  be a uniform partition of
be a uniform partition of  such that
such that ,
,  , where
, where . Let the septic B-spline function
. Let the septic B-spline function  with knots at the points
with knots at the points  be given by
be given by
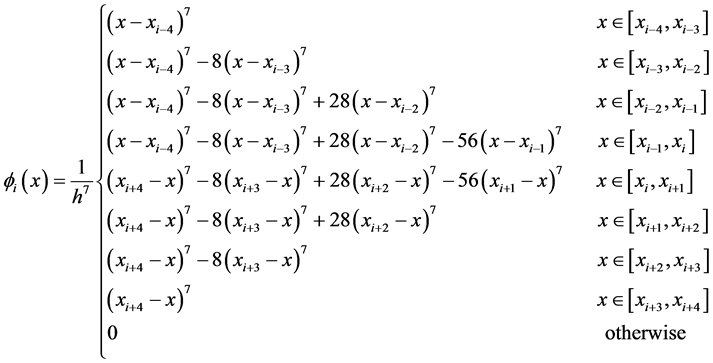 (3)
(3)
The set of splines  forms a basis for the functions defined over
forms a basis for the functions defined over![]() . The values of
. The values of ![]() and its derivatives are as shown in Table 1.
and its derivatives are as shown in Table 1.
We seek the approximation ![]() to the exact solution
to the exact solution![]() , which uses these septic B-splines:
, which uses these septic B-splines:
![]() (4)
(4)
which satisfies the following interpolation conditions:
![]() (5)
(5)
where ![]() are unknown real coefficients.
are unknown real coefficients.
Using the septic B-spline function Equation (3) and the approximate solution Equation (4), the nodal values ![]() and
and ![]() at the node
at the node ![]() are given in terms of element parameters by
are given in terms of element parameters by
![]() (6)
(6)
![]() (7)
(7)
![]()
Table 1. The values of ![]() and its derivatives with knots.
and its derivatives with knots.
From Equations (4)-(7), we have
![]() (8)
(8)
Using operator notations![]() , we obtain
, we obtain
![]() (9)
(9)
Expanding them in powers of![]() , we obtain
, we obtain
![]() (10)
(10)
Hence we get
![]() (11)
(11)
![]() (12)
(12)
3. Spline Collocation Method
3.1. Linear Problems
From Equation (1) and Equation (12), we can get
![]() (13)
(13)
Using the boundary conditions and by neglecting the error of Equation (13), we can obtain following linear equations
![]() (14)
(14)
Or
![]() (15)
(15)
where
![]()
![]()
![]()
where
![]()
T denoting transpose.
In which B is a square matrix of order N + 7 with seven nonzero bands. Since B is nonsingular, after solving the linear system Equation (15) for![]() , we can obtain the septic spline approximate
, we can obtain the septic spline approximate
solution ![]() with the accuracy being
with the accuracy being![]() .
.
3.2. Nonlinear Problems
Consider the nonlinear fifth order boundary value problem
![]() (16)
(16)
with boundary conditions
![]() (17)
(17)
We use the quesilinearization technique to reduce the above nonlinear problem to a sequence of linear problems. Expanding the right hand side of Equation (16), we have
![]() (18)
(18)
Equation (18) can be rewritten as
![]() (19)
(19)
where
![]()
Equation (19) once the initial values (k = 0, ![]() ,
, ![]() ,
,![]() ) has been computed from the initial conditions, Equation (19) becomes into a linear equations with constant coefficients. Equation (19) can be solved by using iterative method.
) has been computed from the initial conditions, Equation (19) becomes into a linear equations with constant coefficients. Equation (19) can be solved by using iterative method.
Subject to the boundary conditions
![]() (20)
(20)
Instead of solving nonlinear problem (16) with boundary conditions (17), we solve a sequence of linear problems (19) with boundary conditions (20), we consider ![]() as the numerical solution to nonlinear problem (16) with boundary conditions (17).
as the numerical solution to nonlinear problem (16) with boundary conditions (17).
4. Computation of Error
The relative error of numerical solution is given by
![]() (21)
(21)
The pointwise errors are given by
![]() (22)
(22)
The maximum pointwise errors are given by
![]() (23)
(23)
5. Numerical Tests
In the section, we illustrate the numerical techniques discussed in the previous section by the following problems.
Example 1. Consider the following equation [15] - [17] :
![]()
With boundary conditions
![]()
The exact solution is given by
![]()
The numerical results are shown in Table 2, the comparison of maximum absolute errors are given by Table 3. The relative errors for different values of h are seen in Figure 1. The pointwise errors of example are given in Figure 2. The maximum pointwise errors for different values of h are given in Figure 3.
Example 2. Consider the following nonlinear equation [15] [18] [19] .
![]()
Table 2. Maximum absolute errors, relative error for example 1.
![]()
Table 3. Comparison of maximum absolute errors for example 1.
![]()
Figure 1. The relative errors of example 1 for different values of h.
![]()
Figure 2. The pointwise errors of example 1.
![]()
Figure 3. The maximum pointwise errors of example 1 for different values of h.
![]()
With boundary conditions
![]()
The exact solution is given by![]() .
.
Comparison of numerical results and pointwise errors are given in Table 4. The numerical result is found in good agreement with exact solution.
![]()
Table 4. Example 2. Comparison of results and pointwise errors.
6. Conclusion
In the paper, the fifth-order boundary value problems are solved by means of septic B-splines collocation method. We use the quesilinearization technique to reduce the nonlinear problems to linear problems and reduce a boundary value problem to the solution of algebraic equations with seven nonzero bands. The numerical results show that the present method is relatively simple to collocate the solution at the mesh points and easily carried out by a computer and approximates the exact solution very well.
Acknowledgements
The authors would like to thank the editor and the reviewers for their valuable comments and suggestions to improve the results of this paper. This work was supported by the Natural Science Foundation of Guangdong (2015A030313827).