Characteristics of a Transactive Phenomenon in Relationships among Older Adults with Dementia, Nurses as Intermediaries, and Communication Robot ()
1. Introduction
Challenges of a society with a decreasing population and increasing population of older adults with dementia are healthcare problems in Japan, and of other developing countries [1] [2] . In Japan, it is estimated that the number of patients with dementia will reach seven million by 2025, and 1 in 10 persons will be at risk of being afflicted with dementia [3] . The New Energy and Industrial Technology Development Organization (NEDO) launched a program called the Robot Care Equipment Development Partnership and served as the coordinating organization. In addition to matching services, NEDO provides various services including information sharing with government agencies, building networks between companies and researchers, and collecting feedback on future policies to promote the application of robotic nursing care devices [4] . With these initiatives, non-industrial robots were mass produced, examples of which were for those for walking support robots [5] [6] or communication robots [7] [8] . These robots are now being introduced in hospitals, nursing homes and in Japanese households.
In reviewing the literatures regarding elderly care, robots, and caring in nursing, new challenges regarding healthcare for the elderly population, it was found that care of the elderly population particularly those with dementia was emerging as a social issue, particularly on the aspect of sustaining adequate healthcare. Therefore, newer healthcare domains have to be considered, and innovation is found to be a required element. One of these innovations in Japan is using robots to assist in healthcare and nursing practice needs. Under this context, unobtrusiveness is of paramount importance since the robot should be a natural participant of patients’ daily life [9] .
Animal-assisted interventions on elderly patients with dementia were found to have positive influences―reducing the degree of agitation and improving the degree and quality of social interaction. It was suggested that a substitute pet robot may yield encouraging results, but its use may require further investigation [10] . With this suggestion, robot therapy is considered another important intervention in the challenging health and innovative care practices needed in the care of elderly persons [11] . Nevertheless, two issues were realized regarding living with a human-type communication robot as a strategy; to improve cognitive functions and prevent cognitive decline in the elderly [12] . With robot therapy, it was found that only a few aspects of its capabilities, when examined closely, were effects derived from the viewpoints of nursing practices and human care [13] [14] . In this regard, robot therapy has not been generalized, and more descriptions and discussions about its practical utility are required.
A key challenge in dementia care is to assist the person sustain communication, connection, and environment with family and caregivers [15] . It was thought necessary to develop not only support of elderly people with dementia but also of robots assuming that families and nurses use such robots.
The aim of this study was to identify the characteristics of a transactive phenomenon in relationships between older adults with dementia and nurses as intermediaries, with communication robots.
2. Method
2.1. Theoretical Framework
The Transactive Relationship Theory of Nursing (TRETON) [16] [17] [18] explains the engagement processes that are characteristic activities among older adults with dementia, the nurse as mediator, and the communication robot. This theory explains the mutual engagement and the technological engagement that transpires among them. In testing the presence of these characteristics transactive relations, physiological determinants were used such as the wearable electrocardiography that measures heart rate variability indicating sympathetic and parasympathetic nervous activity. Together with video-recorded activities, the indications supporting the characteristics transactive phenomenon in relations among older adults with dementia, nurses, and communication robots are made evident.
2.2. Procedure of Data Collection
2.2.1. Communication Robot with Remote-Controlled Speaker
A smile supplement robot “Unazuki Kabochan© (Nodding Kabochan, hereafter, Kabochan)” is a Cognitive Skill Aid Robot [19] . Nodding Kabochon can talk, sing, and slightly nod prettily in response to its owner’s touch and spoken words. The Nodding Kabochan, is a 28-centimeter tall pumpkin-suited robot that affectionately interacts with older adults using its five sensors that are installed in its mouth, head, hands, feet, and main body. These sensors allow the Kabochan to verbally respond to any sounds and movements. Kabochan is pre-programmed to address its owner in eight different ways, including voicing words such as “Grandma” and “Grandpa”. Moreover, the Kabochan contains several physical exercise modes, which includes a pose game, raising the flag game, as well as vocal singing exercises. In addition, a remote-controlled speaker, called Pechat© [20] was attached to the Kabochan to enable a seamless mutual dialogue engagement. The Pechat can be programmed and allows the Kabochan to talk/sing by operating the dedicated “app”. Pechat has a program function prepared by the nurse intermediaries (Figure 1).
2.2.2. Older Persons with Dementia
The two subjects of the study were older persons with dementia who have been diagnosed with dementia using Hasegawa’s Dementia Scale-Revised (HDS-R) [21] . Two older persons a man and woman in their 80s participated in this study. Subject A: male, 80’s, person with dementia and his HDS-R score was 8 points. Subject B: female, 80’s, person with dementia and her HDS-R score was 10 points.
2.2.3. Measuring Autonomic Nervous System Data
The subjects were instructed to rest for 30 minutes before commencing with the intervention as transactive relations activities. The duration of the intervention was about 30 minutes using the Kabochan with Pechat, after which the exercise rehabilitation was performed by the subjects for 30 minutes. During the intervention time, the two nurses mediated with the Kabochan to enhance a smooth procedure-based transactive relationship. First, the conversation was between the Kabochan and the subjects. Next, one nurse operated the Pechat attached to the Kabochan, and the subjects interacted subsequently (Figure 2).
![]()
Figure 2. Intervention and analyzing part in this study.
2.2.4. Analysis Methods of Autonomic Nervous Activity
Heart Rate Variability (HRV) data were assessed at various frequency bands using an HRV software tool (MemCalc/win: GMS, Tokyo, Japan). In a continuously recorded data, interbeat (R-R) intervals were obtained for a 1-min segment using the maximum entropy method. In this study, the two major spectral components of HRV, the variances of the Low-Frequency (LF: 0.04 - 0.15 Hz) band and High-Frequency (HF: 0.15 - 0.4 Hz) band, were calculated. The HF data can be used as an index of parasympathetic nervous activity, and the LF/HF ratio can be used as an index of sympathetic nervous activity.
An optimal level of variability within an organism’s key regulatory systems is critical to the inherent flexibility and adaptability or resilience that epitomizes healthy functioning and well-being [22] . These were suggested to determine the association between quality of emotional experience and the pattern reflected in the HRV waveforms [23] .
HRV is the change in the time intervals between adjacent heartbeats. It is an emergent property of interdependent regulatory systems that operate on different time scales to adapt to environmental and psychological challenges [24] . The heart’s rhythms are characterized as reflecting both physiological and psychological functional status of internal self-regulatory systems [24] .
With psychological regulation, lower HF power is associated with stress, panic, anxiety, or worry [25] . Lowered parasympathetic activity, rather than reduced sympathetic functioning appears to account for the reduced HRV in aging [24] . However, a high LF/HF ratio may indicate higher sympathetic activity relative to parasympathetic activity. This can be observed when persons engage in meeting a challenge that requires effort and increased sympathetic activation. Alternatively, it can indicate increased parasympathetic activity as occurs during slow breathing [24] . In this study, the use of HRV is critical in measuring the psychological functional status and emotional experience of elderly persons particularly those with dementia.
2.2.5. Analysis
Changes in autonomic nervous activity were determined using HRV. Heart Rate (HR), HF, and LF/HF are shown in the graph, it shows the relationship between subjects’ conversation with Kabochan and/or Kabochan with Pechat during intervention. The results were recorded graphically, enabling visual assessments and measurements.
2.2.6. Data Collection Period
Data collection period was December, 2016.
2.2.7. Ethical Consideration
The data collection procedure was performed following the Private Information Protection Law, with approval from the Tokushima University Hospital Ethics Board (approval number 2039) and Mifune Hospital (approval number 20170201-1). The purpose and methods used in the study were explained to all subjects and their guardians. Subjects were assured that their personal information were protected, that the report would be done as an aggregate, and will be used only for research purposes. Informed consents were obtained prior to the commencement of the study.
3. Results
The transactive relationship is presented as a conversational dialogue with older persons, the Kabochan or the Kabochan with Pechat, and two nurses. The results of the study are exhibited as a description of the activity of the autonomic nervous system measurements presented in Figures at specified data collection time.
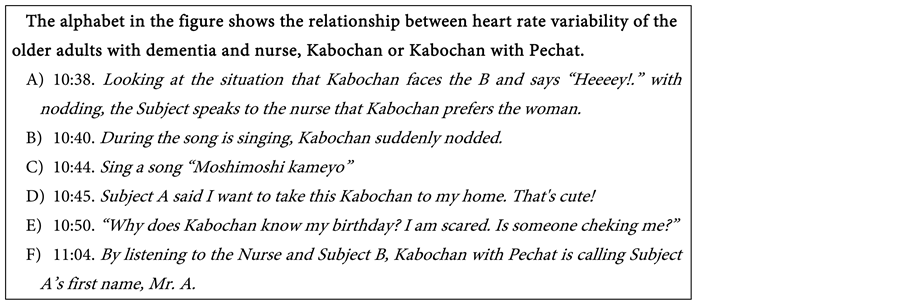
Data collection was started in the morning. The conversational interaction with the Kabochan started at 10:38 a.m., and the conversation involving the Kabochan with Pechat was conducted from 10:50 until 11:09 a.m. At 10:38 a.m., Subject A touched the Kabochan’s hands while saying “It is cute.” Nurse A then moved the Kabochan to let Subject B see it. The Kabochan uttered the word “Heeeey!” while nodding. Subsequently, Subject A while in dialogue with Nurse B made jokes and with facial expressions remarked, “I understand that Kabochan prefers a woman.”
At this time, Subject A’s parasympathetic nervous activity showed some marked elevation. It seemed to show that Subject A was having some health issues but seemed to respond well upon seeing the nodding of the Kabochan (Figure 3).
When Subject A looked at the state of Kabochan with the other subject communicating with it, the time subject’s parasympathetic nervous activity increased.
At 10:44 a.m. The Kabochan began to show incoherent operating activities. This was near the end of the session. This was when Kabochan sang “Usagi to Kame: Rabbits and Turtles nursery rhymes” and uttered “I will forget the time” and “Wow, Thank you”. These words signaled that the batteries needed to be replaced. Both the Kabochan and the nurses ceased to continue singing the song. However, as Subjects A and B seemed to be hard of hearing, they appeared not to hear that the Kabochan was not singing the song anymore.
As soon as the batteries were replaced, Kabochan began to sing again. Subject
B clapped and Subject A nodded and sang the song together as if to teach the child. When the Kabochan stopped singing, the subjects applauded.
10:50 a.m. The Kabochan with Pechat uttered the question, “It is your birthday soon, isn’t it?” Subject A responded with a question, “Why do you know my birthday. I am scared. Is someone checking me?” He seemed to show a sense of fear, as to how the Kabochan with Pechat knew his birthday. He then informed Nurse A that on hearing the Kabochan ask the question, he felt “a shiver up his spine” while at the same time showing a smile. At this time, Subject A’s parasympathetic nervous activity increased from 25.09 to 325.77 msec2 (Figure 4).
![]()
Figure 3. Transactive Relationship between the nurse, Kabochan, and the older adults with dementia.
![]()
Figure 4. HR, HF, LF/HF and the relationship between subjects’ conversation with Kabochan and/or Kabochan with Pechat during intervention (Subject A).
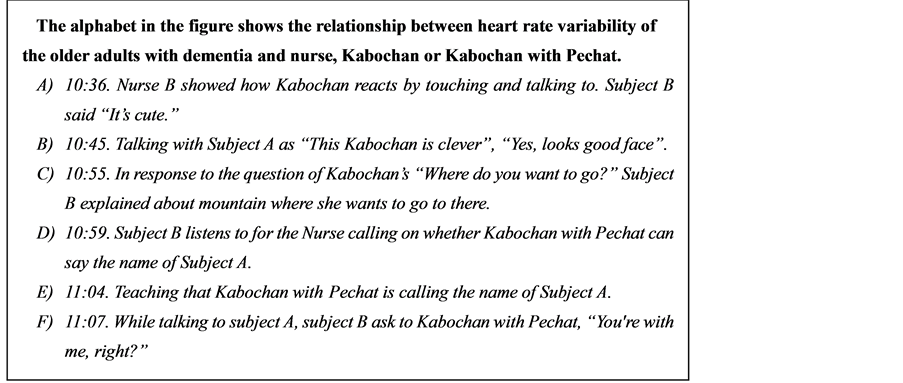
At 10:36 a.m. Nurse B showed what the Kabochan’s reactions was by touching and talking to it. Subject B said “It’s cute.”
At 10:45 a.m. Talking with the Kabochan, Subject A remarked “This Kabochan is clever” “Yes, he looks good and have good facial expression.”
At 10:55 a.m. In responding to the Kabochan’s question, “Where do you want to go?” Subject B explained to Nurse A and B about the mountain where she wanted to go.
At 10:59 a.m. Subject B listened to the Nurses calling on the Kabochan with Pechatas to whether it can say the name of Subject A.
At 11:04 a.m. Explaining that the Kabochan with Pechat is calling the name of Subject A while listening to Nurse A and Subject B, the Kabochan with Pechat called Subject A’s first name. That’s when Subject A’s parasympathetic activity increased.
At 11:07 a.m. While talking to subject A, subject B asked the Kabochan with Pechat, “You’re with me, right?” (Figure 5 and Figure 6).
![]()
Figure 5. Expressions of transactive relationship between the nurse, Kabochan with Pechat, and the older adults with dementia.
![]()
Figure 6. HR, HF, LF/HF and the relationship between subjects’ conversation with Kabochan and/or Kabochan withPechat during intervention (Subject B).
At 10:38 a.m. Subject B asked, “Please let me know your name?” But since the Kabochan cannot answer, instead it said “I do not know.” That’s when Nurse A and B managed the “Kabochan” to smile.
At 10.39 a.m. As Subject B wanted to know how old Kabochan was, Nurse A asked the Kabochan several times: “How old are you?” However, the Kabochan did not respond appropriately and instead replied “Wow, I will forget my time, please replace my battery.” Because the Kabochan did not respond well, Nurse B switched to Kabochan with Pechat mode, and the nurses decided to sing a song together (with the Kabochan with Pechat). Subject A has seen the exchange between and among the Kabochan, Subject B, Nurse A and B with a gentle look (see Figure 7).
4. Discussion
As the demands and needs rise for quality health care particularly in the older adult population, the utilization of human-machine process requirements have intensified and the realities and consequences of transactive relationships have become integral to assuring quality human health care. An outstanding result of the study was the patient singing the song together the Kabochan with Pechat. In explaining the characteristic transactive relationships, the evidence using physiological instrumentations and video-recorded images supports the recognition of opportunities for distinguishing transactive relations which are valuable to the effective application of communication robots in human health care situations, especially for older adults with dementia. Three thematic situations were revealed, namely, a sense of fear, a pleasant sensation, and misunderstanding and confusion.
4.1. Situation 1: A Sense of Fear
When the Kabochan with Pechat uttered the question, “It is your birthday soon, isn’t it?” Subject A said, “Why do you know my birthday. I am scared.” “Is someone checking me?” Subject A felt a sense of fear as to how the Kabochan with Pechat knew his birthday. He then informed Nurse A that he had a heightened sensation up his spine while at same time showing a smile. At that time, his parasympathetic nervous activity increased from 25.09 to 325.77 msec2.
Anxiety is one of the major symptoms of dementia and is often exhibited as some form of fear reaction. Subject A showed some facial expression of fear that was not related to dementia, but rather seemed associated with the realization that his personal secret is known by someone. However, older adults with dementia are easily confused. Attention should be made regarding situations or occasions causing some kind of “fear” among older persons with dementia. As nurse intermediaries, it is critical that meticulous attention be considered when
![]()
![]()
Figure 7. Transactive relationship between the nurse, Kabochan with Pechat, and the elderly patients with dementia.
using personal information reflecting memory evidence as information (Figure 3).
4.2. Situation 2: A Pleasant Sensation
When Subject B clapped, and Subject A nodded and sang a song together with the Kabochan with Pechat, the situation seemed to illustrate that both were teaching a child to sing. When the singing was over, they applauded. The situation seemed to show that at that time, while singing songs with the Kabochan, the subjects’ parasympathetic activity increased and gave a pleasant “social” change to the subjects’ personality as evidenced by their facial expressions (Figure 4).
Sakamoto et al. [25] , reported that passive and interactive music interventions for individuals with severe Alzheimer’s disease caused short-term parasympathetic dominance. Music intervention, such as singing popular tunes, can reduce stress in individuals with severe dementia, with interactive interventions exhibiting the strongest beneficial effects. Since interactive music intervention can restore residual cognitive and emotional function, such approach may be useful for aiding severe dementia patients’ relationships with others and improving QOL.
4.3. Situation 3: Misunderstanding and Confusion
In another scene, Subject B asked, “Please let me know your name?” But since the Kabochan cannot answer the question correctly and instead said “I did not know”, Subject B seemed confused. The Kabochan was not programmed to respond to other questions. At this time, the limited capacity for interaction between the Kabochan, the nurses, and the subjects, was disadvantageous to the subjects’ reality and in determining the transactive characteristic features (Figure 7).
However, as Subjects A, and B seemed to be hard of hearing, they may not have heard the incoherent response. Unfortunately, the nurses noticed that the Kabochan was not functioning well. Therefore, to prevent the subjects from experiencing confusing transactive responses through the Kabochan’s incorrect responses, the nurses as intermediaries intervened by conducting a smooth and pleasant conversation with the subjects. This was fulfilling one of the roles of an expert nurse coordinator. Nurse A and B told Subjects A and B while smiling, that “His name is Kabochan.” Subject A saw the exchange among Subject B, Nurse A and the Kabochan and expressed a gentle smile.
Prior to this occasion, Subject B found the Kabochan to be “cute.” This was the expression when Subject B heard the Kabochan’s voice. The voice of the Kabochan was of a high-pitched frequency range, like that of a boy child. Although it was possible to program the vocalization of the Kabochan to be low-pitched, in doing so, the “cuteness” of Kabochan may be lost.
With age-related hearing loss, or presbycusis, the slow loss of hearing that occurs as people get older, it is characterized by reduced hearing sensitivity and speech understanding in noisy environments, slowed central processing of acoustic information, and impaired localization of sound sources [26] . It is characterized by a decline in auditory functioning, such as increased hearing thresholds and poor frequency resolution [27] . As the voice of the Kabochan with Pechat was relatively high-pitched, an unnatural electronic quality, it seemed that there were times when it was difficult for the older adults with dementia to hear it. Countermeasures against this situation include modulations in communication robot voice sound frequency, adjustments in speed of verbalizations, and increase in the amount of information given at one time through the lengthening of the utterances of the communication robot [28] . It is also critically necessary to take appropriate measures to use the communication robot display so that the elderly can understand the voice of the communication robot and the conversation contents will be useful rather than confusing.
Inoue et al. pointed out that the timing for robots making a smooth speaking voice is difficult [29] . Therefore, it may be assumed that with the participation of nurses as intermediaries, the mutual engagement through conversation among communication robot and older adults with dementia will be of greater usefulness as intervention in elderly care, particularly for patients with dementia.
4.4. Implications for Practice
In this research, the transactive relations among the robot (Kabochan and Pechat), older adults with dementia and nurses as intermediaries revealed the characteristics of the transactive relationships. If communication robots can enhance communicative interaction of older adults with dementia, one of the main challenges is developing a means for an effective and intuitive human-robot interaction. It was suggested that communication robots can keep its voice at a comfortable tone and pitch and its volume can be adjusted as it vocalizes to utter words.
While humans can express their intentions in different ways (e.g., physical gestures or motions, or speech or language patterns, with robots, gaze-based implicit intention) robots are limited as communication programming is still developing [30] .
However, the hope is, if this function for robots is developed well, the conversation between the elderly and the communication robot will be much smoother and characteristic transactive relationships can be easily identified, organized and used to enhance programming of future humanoid nurse robots [16] [17] [18] .
When developing future communication robots for the elderly with dementia, it is considered that an effective conversation will occur best, when this communication robot development includes characteristic transactive relations with nurses as intermediaries. The role functions of these intermediaries have been shown to be of high versatility, indicating that situations such as these may also be controlled by other health care providers such as by occupational therapists in their respective practices.
4.5. Limitations of This Study
Limitation of this study was conducted using HRV and the qualitative word descriptions of two elderly patients during the transactive relationship process between a communication robot and the two nurses. The capability of the HRV to determine neurophysiological response mechanisms determined the predictive effects of the transactive value of the Communication Robot, thereby providing some procedural evidence for using HRV. The influence of robotic technology as therapy suggested a positive and significant outcome. It is thereby envisioned that a study can be conducted to focus on the effect of robot-human interaction using Communication Robots in the future. Using HRV and other parameters which can measure the cognitive status of elderly persons particularly those with dementia is possible.
5. Conclusions
This study identified the characteristics of the transactive phenomenon in relationships among older adults with dementia, with nurses as intermediaries and the communication robot, that is, the Kabochan with Pechat. These characteristic transactive relationships include changes in autonomic nervous system activity of older adults with dementia that are measureable every minute, the linguistic responses of elderly people, and the interactive consequences between the communication robots and nurses as exhibited in the appropriate Figures. These transactive relationships are described in three unique situations, namely: A Sense of Fear, A Pleasant Sensation, and Misunderstanding and Confusion. The electrographic data (Figure 4 and Figure 6) provided neurophysiological evidence of the influence of robot utilization on the autonomic nervous system activity of older adults with dementia.
However, communication robots have continuing issues pertaining to its capabilities to express competence in its actions. Nevertheless, emotional conversations can be established and improved by controlling the communication robot activities with a remote-controlled speaker. Furthermore, the study also revealed that when communication robots with remote-controlled speaker vocalize information about the patient’s personal information in a conversation, the patient feels a sense of fear. Autonomic nervous system data supports this emotional effect when communication robots are able to converse, even if the dialogue is time-limited.
Acknowledgements
We would like to express our deep gratitude to the subjects/participants of this study. In particular, we wish to thank the following clinicians for their participation in this study: Dr. Kazushi Mifune, MD; PhD, Dr. Hiroshi Ogasawara, MD; PhD, and Ms. Keiko Nagao, RN, Head Nurse (San Ai Kai). This work was partly supported by JSPS KAKENHI Grant Number JP 24390477, and partly supported by Grant of the Tokushima University.