Paper Menu >>
Journal Menu >>
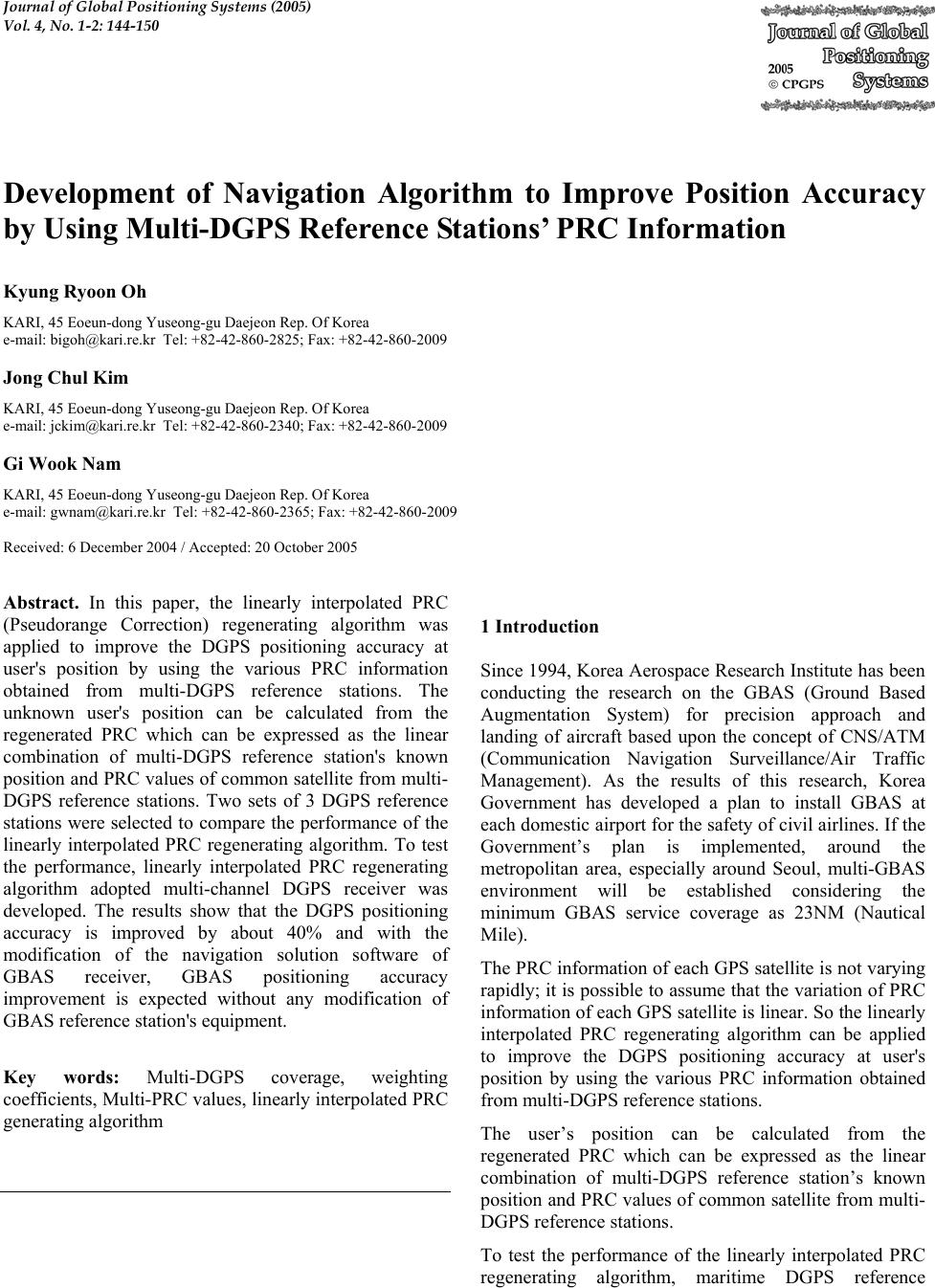 Journal of Global Positioning Systems (2005) Vol. 4, No. 1-2: 144-150 Development of Navigation Algorithm to Improve Position Accuracy by Using Multi-DGPS Reference Stations’ PRC Informati on Kyung Ryoo n Oh KARI, 45 Eoeun-dong Yuseong-gu Daejeon Rep. Of Korea e-mail: bigoh@kari.re.kr Tel: +82-42-860-2 8 25; Fax: +82-42-860-2009 Jong Chul Kim KARI, 45 Eoeun-dong Yuseong-gu Daejeon Rep. Of Korea e-mail: jckim@kari.re.kr Tel: +82-42-860-2340; Fax: +82-42-860-2009 Gi Wook Nam KARI, 45 Eoeun-dong Yuseong-gu Daejeon Rep. Of Korea e-mail: gwnam@kari.re.kr Tel: +82-42-860-236 5; F ax: +82-42-860-2009 Received: 6 December 2004 / Accepted: 20 October 2005 Abstract. In this paper, the linearly interpolated PRC (Pseudorange Correction) regenerating algorithm was applied to improve the DGPS positioning accuracy at user's position by using the various PRC information obtained from multi-DGPS reference stations. The unknown user's position can be calculated from the regenerated PRC which can be expressed as the linear combination of multi-DGPS reference station's known position an d PRC values of common satellit e from multi- DGPS reference stations. Two sets of 3 DGPS reference stations were selected to compare the performance of the linearly interpolated PRC regenerating algorithm. To test the performance, linearly interpolated PRC regenerating algorithm adopted multi-channel DGPS receiver was developed. The results show that the DGPS positioning accuracy is improved by about 40% and with the modification of the navigation solution software of GBAS receiver, GBAS positioning accuracy improvement is expected without any modification of GBAS reference station's equipment. Key words: Multi-DGPS coverage, weighting coefficients, Multi-PRC values, linearly in terpolated PRC generating algorithm 1 Introduction Since 1994, Korea Aerospace Research In stitute has been conducting the research on the GBAS (Ground Based Augmentation System) for precision approach and landing of aircraft based upon the concept of CNS/ATM (Communication Navigation Surveillance/Air Traffic Management). As the results of this research, Korea Government has developed a plan to install GBAS at each domestic airport for the safety of civil airlines. If the Government’s plan is implemented, around the metropolitan area, especially around Seoul, multi-GBAS environment will be established considering the minimum GBAS service coverage as 23NM (Nautical Mile). The PRC information of each GPS satellite is no t varying rapidly; it is possible to assume that the variation of PRC information of each GPS satellite is linear. So the linearly interpolated PRC regenerating algorithm can be applied to improve the DGPS positioning accuracy at user's position by using the various PRC information obtained from multi-DGPS reference stations. The user’s position can be calculated from the regenerated PRC which can be expressed as the linear combination of multi-DGPS reference station’s known position an d PRC values of common satellit e from multi- DGPS refer ence stations. To test the performance of the linearly interpolated PRC regenerating algorithm, maritime DGPS reference 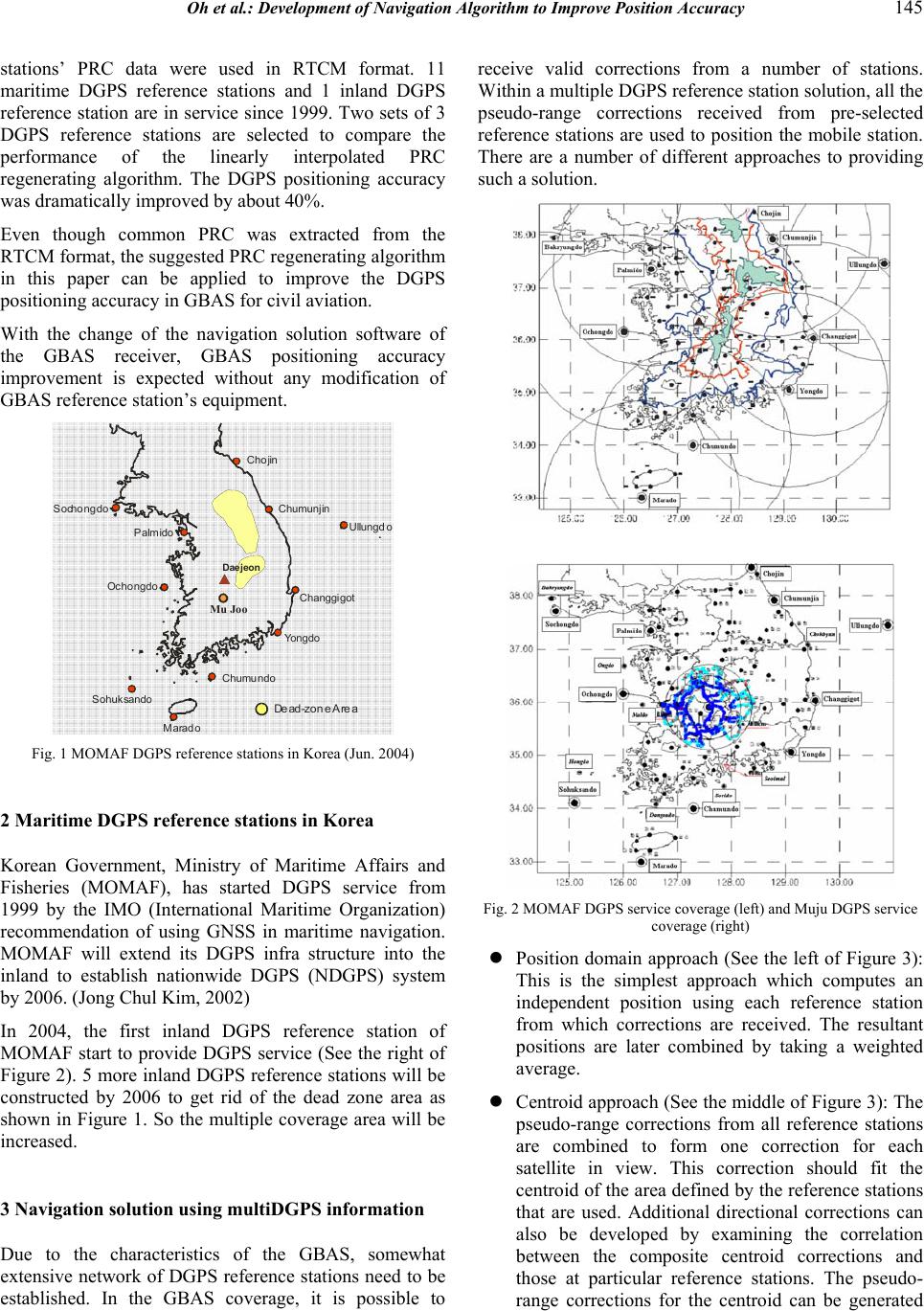 Oh et al.: Development of Navigation Algorithm to Improve Position Accuracy 145 stations’ PRC data were used in RTCM format. 11 maritime DGPS reference stations and 1 inland DGPS reference station are in service since 1999. Two sets of 3 DGPS reference stations are selected to compare the performance of the linearly interpolated PRC regenerating algorithm. The DGPS positioning accuracy was dramati ca ll y improved by about 40%. Even though common PRC was extracted from the RTCM format, the suggested PRC regenerating algorithm in this paper can be applied to improve the DGPS positioning accuracy in GBAS for civil aviation. With the change of the navigation solution software of the GBAS receiver, GBAS positioning accuracy improvement is expected without any modification of GBAS reference station’s equipment. Palmido Sochongdo Cho jin Ochongdo Chumundo Marad o Sohuksando Yongdo Changgigot Ullungd o Chumunjin Daejeon Dead-zone Area Mu Joo Fig. 1 MOMAF DGPS reference stations in Ko rea (Jun. 2004) 2 Maritime DGPS reference stations in Korea Korean Government, Ministry of Maritime Affairs and Fisheries (MOMAF), has started DGPS service from 1999 by the IMO (International Maritime Organization) recommendation of using GNSS in maritime navigation. MOMAF will extend its DGPS infra structure into the inland to establish nationwide DGPS (NDGPS) system by 2006. (Jong Chul Kim, 2002) In 2004, the first inland DGPS reference station of MOMAF start to provide DGPS service (See the right of Figure 2). 5 more inland DGPS reference stations will be constructed by 2006 to get rid of the dead zone area as shown in Figure 1. So the multiple coverage area will be increased. 3 Navigation solution usi n g multiDGPS information Due to the characteristics of the GBAS, somewhat extensive network of DGPS reference stations need to be established. In the GBAS coverage, it is possible to receive valid corrections from a number of stations. Within a multiple DGPS referen ce station solu tion , all th e pseudo-range corrections received from pre-selected reference stations are used to position the mobile station. There are a number of different approaches to providing such a solution. Fig. 2 MOMAF DGPS service coverage (left) and Muju DGPS s e rvice coverage (right) z Position domain approach (See the left of Figure 3): This is the simplest approach which computes an independent position using each reference station from which corrections are received. The resultant positions are later combined by taking a weighted average. z Centroid approach (See the middle of Figure 3 ): The pseudo-range corrections from all reference stations are combined to form one correction for each satellite in view. This correction should fit the centroid of the area defined by the reference stations that are used. Additional directional corrections can also be developed by examining the correlation between the composite centroid corrections and those at particular reference stations. The pseudo- range corrections for the centroid can be generated  146 Journal of Global Positioning Systems either at a land-based hub or at the mobile station itself. T he advan tage of the fo rmer is that the mobile station needs only to receive one set of pseudo-range corrections. z All-in-view approach (See the right o f Figure 3): All the pseudo-range corrections received from the reference stations are incorporated into one positioning solution with no pre-processing (except for validity checks). For instance, the correction for satellite PRN 12 may be received from 4 different reference stations and will be used separately to correct the pseudo-range observed at the mobile station from PRN 12 - thus adding 4 observations to the system. Fig. 3 The positioning methods us ing multi-DGPS references Fig. 4 Linear interpolation of the PRC from two DG P S Reference stations 3.1 Developing the linearly interpolated P RC regenerat i n g al g o r i t h m In developing the linearly interpolated PRC regenerating algorithm, there are some basic assumptions: a. The user only uses the common in view satellites to calculate hhe positions for both sides of the user and reference stations. b. At least, 4 common satellites exist between the user and reference stations. c. The variation of the correction data of a satellite is small enough to assume that the characteristic of the PRC variation for each satellite is linear. PRC linear interpolating Algorithm: In Figure 4, the user will be at user1 or user2, 3 location between DGPS reference station x and station y. The DGPS correction(PRCx,i , PRCy,i, i=1,2,..n) value of common satellite is not the same, so there is a gradient of the DGPS correction value for the common satellite between the DGPS reference stations. If the user can use this gradient information, more precise position information is achievable. (Loomis et al., 1995) The unknown user’s position (longitude, latitude) can be calculated from the regenerated PRC which can be expressed as the linear combination of multi-DGPS reference station’s known positions and the PRC values of the common satellite from the multi-DGPS reference stations. (Hong, 1990) The unknown user’s position can be expressed by using the relative geometry information of the stations. (van Essen et al., 1997)  Oh et al.: Development of Navigation Algorithm to Improve Position Accuracy 147 Fig. 5 Geometry relation betw ee n t he user and DGPS reference station’s locations nni n iixaxaxaxaxax ++++== ∑ = ... 332211 1 (1) nni n iiyayayayayay ++++== ∑ = ... 332211 1 (2) n n iiaaaaa ++++== ∑ = ...1 321 1 (3) Let’s assume that the number of reference stations is r, marks as nr, and the number of satellites in line of sight is s, marks as ns. And each reference station observes the same GNSS satellites, but the PRC values of specific satellites differ from the DGPS reference stations. Then the linearly interpolated PRC(ij ∇ ,i=1,2,...ns, j=1,2,..nr) at the user’s spot can be expressed as: )()( 211 yyaxxa j i j iiij−+−+∇=∇ (4) In the above equation, xi is the latitude yi is longitude respectively in WGS-84. The parametersi a1and i a2 are the coefficients of a plane which contains all the DGPS reference station coordinates. For the case of using 3 DGPS reference stations, Equation 4 can be written as the following matrix format: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∆∆ ∆∆ = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∇−∇ ∇−∇ 2 1 33 22 13 12 a a yx yx ii ii (5) Or, ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡ ∇−∇ ∇−∇ ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ∆∆ ∆∆ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− ii ii yx yx a a 13 12 1 33 22 2 1 (6) Where 1 xxx jj − = ∆ , 1 yyy jj −= ∆ For the case of using more than 4 DGPS reference stations, the above equations can be written as in general format (van Essen et al., 1997): ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ∇−∇ ∇−∇ ∇−∇ ∇−∇ = ⎥ ⎦ ⎤ ⎢ ⎣ ⎡− ii r ii ii ii TGG a a 1 14 13 12 1 2 1)( # (7) Matrix G is a set of known coordinate information of the DGPS reference stations. On the right side of Equation 7, [ii j1 ∇−∇ ] (i=1,2,...ns, j=1,2,..nr) term value can be determined using the measurement of PRC information from each DGPS reference station. With the values for a1 and a2, the linearly interpolated PRC (ij ∇) can be determined using Equation 4. Generating linearly interpolated PRC : In Figure 6, GPS time in GPS raw data and Modified Z count in DGPS information are compared to check if the data is time synchronized with each other or not. If data is time synchronized, the common satellite number in the data from the Reference Stations is checked. If the number of common satellites is less than 4, the data will be discarded and the next epoch data will be used. If more than 4 common PRC data exist, the procedure moves to next step. To get the linearly interpolated PRC information, input the user’s position into the linearly interpolated PRC regenerating algorithm. Then PRC linear interpolating algorithm will regenerate the new PRC value. Fig. 6 Diagram of extracting c ommon PRC and generating linearly interpolate d P R C  148 Journal of Global Positioning Systems The next procedure to get the DGPS position is explained in Figure 7. In this procedure, the number of common satellites is critical. If the common satellite number is more than 4, the regenerated PRC will be input into the DGPS navigation solution algorithm based on the carrier smoothed algorithm (Park et al, 2003). 3.2 Analysis t he effect of the linearly interpolated PRC Phase I : In phase I analysis, the PRC information of Multi DGPS station gathered through the landline. Each maritime DGPS reference station stored the broadcasted DGPS information every 5 sec. So the analysis was carried out as a post proce ss i ng. To analyse the effect of the linearly interpolated PRC algorithm, three sets of DGPS reference stations combination were used. There are 4 DGPS reference stations in the first set, 3 in the second set, 2 in the third set. As a result of phase I analysis, the second set shows the best results. Comparing the position accuracy with the stand alone DGPS reference station, an average of 33% improvement was achieved. Table.1 shows the results of the analysis of the second set. In the case of using 2 DGPS reference stations’ PRC information, the DGPS position accuracy was 1.8m. Other case of using 3 DGPS reference stations’ PRC information, the DGPS positioning was 0.788m and 1.164m depending on which combination of DGPS reference stations used. The last case of using 4 DGPS reference stations’ PRC information, the worst result achieved. DGPS position accuracy w a s 2.449m. Phase II : In phase II analysis, one 3 channel DGPS receiver was built to field test the performance of the linearly interpolated PRC regenerating algorithm. The built receiver (See Figure 10) can have up to 6 channels. For the field test, a river side area was selected rather than inland. By the rule of thumb, the medium wave signal propagation characteristic around the river side is better than that of inland. The PRC values were analysed in real situation and the results shows (See the Table 2) that there was an averaged 4.2% difference between the PRC values of each GPS satellite. The PRC value changes of inbound and outbound GPS satellites are shown in Figure 11. Tab. 1 The position accuracy using 3 DGPS reference stations Multi- Ref. Changgi got Ochong do Sochong do Chumu njin Distance(Km) 202 127 279 214 1.164 1.959 1.607 1.223 Position Error (m) 0.788 1.607 1.223 1.239 24.3 40.6 27.6 4.8 Improvement (%) 41.0 51.0 35.6 36.4 Fig. 7 Scatter plot of DGPS positioning of Sochongdo (left) and Ochongdo (right) Fig. 8 Scatter plot of DGPS positioning of Chumunjin (left) and Changgigot (right) Fig. 9 Multi-Ref.s DGPS positioning accuracy; 1.164 m (left) and 0.788m (right) Tab. 2 The maximum ga p of PRC values SV Ref. S. SV1 SV6 SV14 SV16 SV20 SV25 Muju -7.1951 -11.521 -11.191 -12.100 -18.858 -10.069 Ochongdo -6.9579 -12.078 -11.328 -11.218 -18.387 -10.034 Palmido -7.3114 -11.718 -11.691 -11.914 -18.574 -10.181 PRC gap 4.84(%) 4.61(%) 4.28(%) 7.29(%) 2.50(%) 1.45(%) 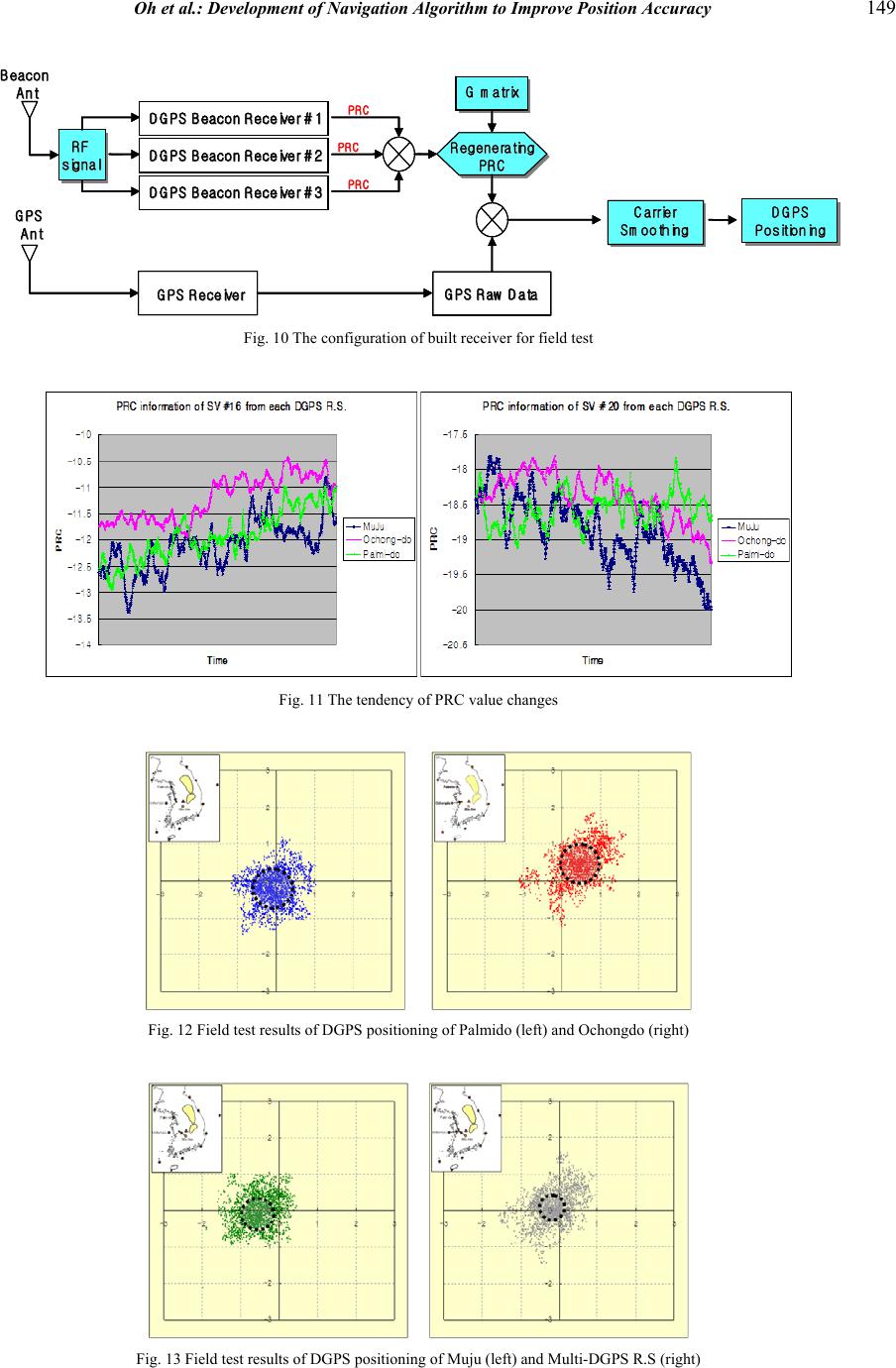 Oh et al.: Development of Navigation Algorithm to Improve Position Accuracy 149 Beacon Beacon Ant Ant RF RF signal signal DGPS Beacon Receiver #1 DGPS Beacon Receiver #1 DGPS Beacon Receiver #2 DGPS Beacon Receiver #2 DGPS Beacon Receiver #3 DGPS Beacon Receiver #3PRC PRC PRC PRC PRC PRC Regenerating Regenerating PRC PRC GPS GPS Ant Ant GPS Receiver GPS Receiver GPS Raw Data GPS Raw Data G matrix G matrix Ca rrier Carrier Sm oothing Sm oothing DG PS DGPS Positioning Positioning Beacon Beacon Ant Ant RF RF signal signal DGPS Beacon Receiver #1 DGPS Beacon Receiver #1 DGPS Beacon Receiver #1 DGPS Beacon Receiver #1 DGPS Beacon Receiver #2 DGPS Beacon Receiver #2 DGPS Beacon Receiver #2 DGPS Beacon Receiver #2 DGPS Beacon Receiver #3 DGPS Beacon Receiver #3 DGPS Beacon Receiver #3 DGPS Beacon Receiver #3PRC PRC PRC PRC PRC PRC Regenerating Regenerating PRC PRC GPS GPS Ant Ant GPS Receiver GPS Receiver GPS Raw Data GPS Raw Data GPS Raw Data GPS Raw Data G matrix G matrix G matrix G matrix Ca rrier Carrier Sm oothing Sm oothing DG PS DGPS Positioning Positioning Fig. 10 The configuration of built receiver for field test Fig. 11 The tendency of PRC va l ue c ha n ge s Fig. 12 Field test results of DGPS positioning of Palmido (left) and Ochon gdo (right) Fig. 13 Field test results of DGPS positioning of Muju (left) and Multi-DGPS R.S (right)  150 Journal of Global Positioning Systems Fig. 14 Scatter plot of the field test results of DGPS positionin g 4 Conclusion s The linearly interpolated PRC regenerating algorithm has been proposed in this paper, which can improve the DGPS position accuracy by about 40% without any changes in DGPS reference station’s system. In the phase I study, off-lined PRC data was used. DGPS RF signals directly from the DGPS stations are available through a multi channel DGPS beacon receiver developed in phase II study. The results of phase II stud y shows th at the PRC regenerating algorithm works well. Acknowledgement s This study was supported by the 2004 National R&D Program. The authors greatly appreciate the support of Korea Research Coun cil of Public Scien ce & Technology (KORP), Korea. References Hong G.D., (1990): Linear controllable systems. Nature, Vol. 135, 18-27 Kim J.C., Oh K.R. (2002): Development of the strategies for NDGPS in Korea. Korea Aerospace Research Institute, Final Report, Aug. Loomis P, Sheynblatt L, Muller T(1995): Differential GPS Network Design. Proceedings on ION-GPS '95, The Institute of Navigation, Alexandria, VA, U.S.A., 511-520 van Essen R.F., Offermans G.W.A., Helwig A.W.S., van Wiiligen D. (1997): Regional Area Augmentation Concept for Eurofix-Reducing Spatial Decorrelation Effects through Multi-station DGPS. 26th Annual Technical Symposium of the International Loran Association, Ottawa, Canada, 6-9 Oct. Park Y.H., Oh K.R., Kim J.C. (2003): Development of Linearly Interpolated PRC Generating Algorithm to Improve Navigation Solution Using Multi-DGPS Reference Stations. 10th GNSS workshop, phoenixpark, Rep. of Korea, 21-22 Nov., 360-363 |