Applied Mathematics
Vol.4 No.10A(2013), Article ID:37397,8 pages DOI:10.4236/am.2013.410A1002
Partitioning Algorithm for the Parametric Maximum Flow
1National College Andrei Şaguna, Braşov, Romania
2Department of Theoretical Computer Science, Transilvania University of Braşov, Braşov, Romania
Email: parpalea@gmail.com, e.ciurea@ unitbv.ro
Copyright © 2013 Mircea Parpalea, Eleonor Ciurea. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received May 27, 2013; revised June 27, 2013; accepted July 4, 2013
Keywords: Network Flow; Parametric Flow; Conditional Augmenting Paths
ABSTRACT
The article presents an approach to the maximum flow problem in parametric networks with linear capacity functions of a single parameter, based on the concept of shortest conditional augmenting directed path. In order to avoid working with piecewise linear functions, our approach uses a series of parametric residual networks defined for successive subintervals of the parameter values where the parametric residual capacities of all arcs remain linear functions. Besides working with linear instead piecewise linear functions, another main advantage of our approach is that every directed path in such a parametric residual network is also a conditional augmenting directed path for the subinterval for which the parametric residual network was defined. The complexity of the partitioning algorithm is  where
where  is the number of partitioning points of the parameter values interval, n and m being the number of nodes, respectively the number of arcs in the network.
is the number of partitioning points of the parameter values interval, n and m being the number of nodes, respectively the number of arcs in the network.
1. Introduction
Efficient algorithms for computing maximum flows in networks are important not only because they are applied directly to the analysis of traffic or communication networks, but also because they are often employed as subproblems in other general network problems. Fundamental algorithms for network flow were designed and efficient algorithms exist (Ahuja, Magnanti, & Orlin) [1] to solve different instances of this problem. A natural generalization of the maximum flow problem can be obtained by making the capacities of some arcs functions of a single parameter. The parametric maximum flow problem is to compute all maximum flows for every possible value of the parameter. For the parametric maximum flow problem with zero lower bounds and linear capacity functions of a single parameter, Hamacher and Foulds [2] investigated an approach for determining in each iteration an improvement of the flow defined on the whole interval of the parameter while for the same problem, Ruhe [3], [4] proposed a “piece-by-piece” approach. The partitioning type approach, which is presented in this paper, proposes an original algorithm for computing the maximum flow in networks with constant lower bounds and linear upper bound functions.
Partitioning technique in network has been, in the latest years, a more and more active research topic in both engineering and theoretical research. The reason why the problem under consideration is of genuine practical and theoretical interest lies in that graph partitioning applications are described on a wide variety of subjects as: data distribution in parallel-computing, VLSI circuit design, image processing, computer vision, route planning, air traffic control, mobile networks, social networks, etc. [5]. Unfortunately, graph partitioning is an NP-hard problem, and therefore all known algorithms for generating partitions merely return approximations to the optimal solution.
Further on, this paper is organized as follows; Section 2 presents the basic network flow terminology and results used in the rest of the paper. More specialized terminology is developed in later sections. In Section 3, we introduce the parametric maximum flow problem and Section 4 presents the partitioning algorithm for solving this problem. Finally, Section 5 gives an example of how the algorithm works on a network with linear upper bound functions of a single parameter. In the presentation to follow, some familiarities with flow algorithms are assumed and many details are omitted, since they are straight forward modifications of known results. Further details on notions and results presented in Section 2 can be found in the papers of Ahuja et al. [1] and Ciurea et al. [6,7].
2. Terminology and Preliminaries
Let  be a capacitated network with
be a capacitated network with  nodes and
nodes and  arcs,
arcs,  being the set of nodes i and
being the set of nodes i and  being the set of arcs a, so that for every arc in
being the set of arcs a, so that for every arc in ,
,  with
with . The upper bound function and the lower bound function are two nonnegative functions,
. The upper bound function and the lower bound function are two nonnegative functions,  and
and  associated with each arc
associated with each arc . The network has two special nodes: a source node
. The network has two special nodes: a source node  and a sink node
and a sink node . A flow is a function
. A flow is a function  satisfying the next conditions:
satisfying the next conditions:
 (1)
(1)
for some , where
, where  is referred to as the value of the flow
is referred to as the value of the flow . Any flow on a directed network satisfying the flow bound constraints:
. Any flow on a directed network satisfying the flow bound constraints:
 (2)
(2)
is referred to as a feasible flow. A cut is a partition of the node set  into two subsets
into two subsets  and
and , denoted by
, denoted by . An arc
. An arc  with
with  and
and  is referred to as a forward arc of the cut while an arc
is referred to as a forward arc of the cut while an arc  with
with  and
and  as a backward arc of the cut. Let
as a backward arc of the cut. Let  denote the set of forward arcs in the cut and
denote the set of forward arcs in the cut and  denote the set of backward arcs. A cut
denote the set of backward arcs. A cut  is an
is an  cut if
cut if  and
and . The maximum flow problem is to determine a flow
. The maximum flow problem is to determine a flow  for which
for which  is maximized. The maximum flow problem in a network can be solved in two phases: (1) establishing a feasible flow; (2) from a given feasible flow, establishing the maximum flow. For the first phase, see the algorithms presented in [1,7,8].
is maximized. The maximum flow problem in a network can be solved in two phases: (1) establishing a feasible flow; (2) from a given feasible flow, establishing the maximum flow. For the first phase, see the algorithms presented in [1,7,8].
3. The Parametric Maximum Flow
The parametric flow problem consists in generalising the classic problem of flows in networks by transforming the upper bounds of some arcs  of the network
of the network in linear functions of a real parameter
in linear functions of a real parameter .
.
Definition 1. A directed network  for which the upper bounds
for which the upper bounds  of some arcs
of some arcs  are functions of a real parameter
are functions of a real parameter  is referred to as a parametric network and is denoted by
is referred to as a parametric network and is denoted by .
.
For a parametric network , the parametric upper bound (capacity) function
, the parametric upper bound (capacity) function  associates to each arc
associates to each arc  and for each of the parameter values
and for each of the parameter values  in an interval
in an interval , the real number
, the real number , referred to as the upper bound of arc
, referred to as the upper bound of arc :
:
 (3)
(3)
where  is a real valued function associating to each arc
is a real valued function associating to each arc  the real number
the real number , referred to as the parametric part of the upper bound of the arc
, referred to as the parametric part of the upper bound of the arc . The nonnegative value
. The nonnegative value  is the upper bound of the arc
is the upper bound of the arc  for
for , i.e.
, i.e. with
with . For the problem to be correctly formulated, the upper bound function of every arc
. For the problem to be correctly formulated, the upper bound function of every arc  must respect the condition
must respect the condition  for the entire interval of the parameter values, i.e.
for the entire interval of the parameter values, i.e.  and
and . It follows that the parametric part of the upper bounds
. It follows that the parametric part of the upper bounds  must satisfy the constraint:
must satisfy the constraint: ,
, . The parametric flow value function
. The parametric flow value function  associates to each of the nodes
associates to each of the nodes  a real number
a real number  referred to as the value of node
referred to as the value of node  for each of the parameter
for each of the parameter  values.
values.
Definition 2. A feasible flow in the parametric network  is called a parametric flow and it is a function
is called a parametric flow and it is a function  satisfying the following constraints:
satisfying the following constraints:
 (4)
(4)
 (5)
(5)

The parametric maximum flow (PMF) problem is to compute all maximum flows for every possible value of :
:
 , (6)
, (6)
 (7)
(7)
 (8)
(8)
This problem looks like a classic maximum flow problem with the decisive difference that the variables  of this problem are piecewise linear functions instead of real numbers and that the upper bounds
of this problem are piecewise linear functions instead of real numbers and that the upper bounds are linear functions instead of constants.
are linear functions instead of constants.
Definition 3. Let F be the set of piecewise linear functions  with
with . On the set F, an ordering relation is defined as follows:
. On the set F, an ordering relation is defined as follows:
 . (9)
. (9)
For any two piecewise linear functions  and
and , it is possible that neither the relation
, it is possible that neither the relation  nor
nor  hold for the entire interval
hold for the entire interval  and consequently, the two functions may not necessarily be comparable. But it is always possible that a partitioning B:
and consequently, the two functions may not necessarily be comparable. But it is always possible that a partitioning B: of the interval
of the interval  to be defined such as on every subinterval
to be defined such as on every subinterval ,
, one of the two cases to hold:
one of the two cases to hold:  or
or , i.e. the two linear functions to become comparable. This means that the two functions have no crossing points within any subinterval
, i.e. the two linear functions to become comparable. This means that the two functions have no crossing points within any subinterval , the only crossing points taking place for
, the only crossing points taking place for .
.
Proposition 1. For the parametric maximum flow problem, the subintervals ,
,  , of the parameter
, of the parameter  values can be defined so that a minimum
values can be defined so that a minimum  cut in the non-parametric network
cut in the non-parametric network , with
, with , also to represent a minimum
, also to represent a minimum  cut for all the parameter
cut for all the parameter  values within the subinterval
values within the subinterval .
.
Definition 4. A parametric  cut partitioningdenoted by
cut partitioningdenoted by ,
,  , is defined as a finite set of cuts
, is defined as a finite set of cuts ,
,  , together with a partitioning of the interval
, together with a partitioning of the interval  of the parameter in disjoints subintervals
of the parameter in disjoints subintervals ,
,  , so that
, so that .
.
Definition 5. For the parametric maximum flow problem, the capacity  of a parametric
of a parametric  cut partitioning is a linear function on every subinterval
cut partitioning is a linear function on every subinterval ,
,  , defined as:
, defined as:
 (10)
(10)
Definition 6. A parametric  cut partitioning
cut partitioning  with the subintervals
with the subintervals  assuring that every cut is a minimum cut
assuring that every cut is a minimum cut  within the subinterval
within the subinterval  is referred to as a parametric minimum
is referred to as a parametric minimum  cut and is denoted by
cut and is denoted by ,
, .
.
Theorem 1. (Parametric max-flow min-cut theorem [9]) If there is a feasible flow in the parametric network , the value function
, the value function  of the parametric maximum flow
of the parametric maximum flow  from a source s to a sink t equals the capacity
from a source s to a sink t equals the capacity  of the parametric minimum
of the parametric minimum  cut
cut ,
, .
.
Let  be a vector of feasible flow functions. Assuming that an arc
be a vector of feasible flow functions. Assuming that an arc  carries a flow
carries a flow , the existing flow can be increased either by pushing the flow
, the existing flow can be increased either by pushing the flow  from node
from node  to node
to node  over the arc
over the arc , or by pulling the flow
, or by pulling the flow  from node
from node  to node
to node  along the arc
along the arc . These flows are computed as differences between piecewise linear functions of
. These flows are computed as differences between piecewise linear functions of .
.
Definition 7. For the parametric maximum flow problem, the parametric residual capacity  of any of the arcs
of any of the arcs  with respect to a given parametric flow
with respect to a given parametric flow  represents the maximum additional flow that can be sent from node
represents the maximum additional flow that can be sent from node  to node
to node  over the arcs
over the arcs  and
and  and is given by:
and is given by:
 .(11)
.(11)
Definition 8. The subintervals  where an augmentation of the flow
where an augmentation of the flow  is possible along the arc
is possible along the arc  are defined as follows:
are defined as follows:
 (12)
(12)
Definition 9. Given a feasible flow  in the parametric network
in the parametric network , the network denoted by
, the network denoted by with
with being the set consisting only of arcs with positive parametric residual capacities, is referred to as the parametric residual network with respect to the given flow
being the set consisting only of arcs with positive parametric residual capacities, is referred to as the parametric residual network with respect to the given flow  for the parametric maximum flow problem.
for the parametric maximum flow problem.
If an arc  does not belong to
does not belong to  then
then  is set.
is set.
Definition 10. A conditional augmenting directed path is denoted by  and is a directed path
and is a directed path  from the source s to the sink t in the parametric residual network
from the source s to the sink t in the parametric residual network  with the restriction that:
with the restriction that:
 (13)
(13)
Definition 11. A partly conditional augmenting directed path is denoted by  and is a conditional augmenting directed path
and is a conditional augmenting directed path  from the source s to node
from the source s to node in the parametric residual network
in the parametric residual network .
.
Definition 12. The parametric residual capacity of a conditional augmenting directed path  is the inner envelope of the parametric residual capacity functions
is the inner envelope of the parametric residual capacity functions  for all arcs
for all arcs  composing
composing  and for all parameter
and for all parameter  values in the subinterval
values in the subinterval :
:
 . (14)
. (14)
Let  be the number of subintervals within the piecewise linear function
be the number of subintervals within the piecewise linear function  maintains a constant slope. Since any conditional augmenting directed path
maintains a constant slope. Since any conditional augmenting directed path  is an elementary path, results that
is an elementary path, results that .
.
Theorem 2. (Conditional augmenting path theorem [9]) A flow  is a parametric maximum flow if and only if the parametric residual network
is a parametric maximum flow if and only if the parametric residual network  contains no conditional augmenting directed path.
contains no conditional augmenting directed path.
4. Partitioning Algorithm for the Parametric Maximum Flow Problem
The partitioning algorithm (PA) for the parametric maximum flow problem presented in this paper determines in each of its iterations an improvement of the flow over a subinterval of the parameter values generated by the partition induced by the first (in increasing order of their  values) of the breakpoints of the piecewise linear parametric residual capacity of the conditional augmenting directed paths
values) of the breakpoints of the piecewise linear parametric residual capacity of the conditional augmenting directed paths  in the parametric residual network. Since the parametric residual capacities for all the arcs in
in the parametric residual network. Since the parametric residual capacities for all the arcs in are linear functions of
are linear functions of , the parametric residual capacity
, the parametric residual capacity  of any conditional augmenting directed path
of any conditional augmenting directed path  in the parametric residual network is a piecewise linear function of
in the parametric residual network is a piecewise linear function of  with
with  breakpoints.
breakpoints.
In order to avoid working with piecewise linear functions, the algorithm works in several parametric residual networks defined for subintervals of the parameter values where the parametric residual capacities of all arcs remain linear functions. The parametric residual network defined for the subinterval
defined for the subinterval  of the parameter values is denoted by
of the parameter values is denoted by . Besides working with linear instead piecewise linear functions, another main advantage of our approach is that every augmenting directed path
. Besides working with linear instead piecewise linear functions, another main advantage of our approach is that every augmenting directed path  in a parametric residual network
in a parametric residual network  is also a conditional augmenting directed path
is also a conditional augmenting directed path  in
in  for the subinterval
for the subinterval for which the residual network
for which the residual network  is defined.
is defined.
The first phase of finding a parametric maximum flow consists in establishing a feasible flow, if one exists, in a non-parametric network  obtained from the initial parametric network by only replacing the parametric upper bound functions with the non-parametric upper bounds:
obtained from the initial parametric network by only replacing the parametric upper bound functions with the non-parametric upper bounds:  for
for and
and  for
for . After a feasible flow
. After a feasible flow  is established, the next step is to compute the parametric residual network
is established, the next step is to compute the parametric residual network  for this feasible flow. For the non-parametric flow
for this feasible flow. For the non-parametric flow , the parametric residual capacities for every arc
, the parametric residual capacities for every arc  in
in  can be written as
can be written as , where
, where  represents the slope of the parametric residual capacity function and
represents the slope of the parametric residual capacity function and is the value of the parametric residual capacity function computed for
is the value of the parametric residual capacity function computed for , i.e.
, i.e. .
.
The second phase of the algorithm starts with the parametric residual network , defined for the nonparametric feasible flow
, defined for the nonparametric feasible flow , which is also
, which is also , i.e.
, i.e.  and
and , since the residual capacities of all arcs are linear functions. The algorithm repeatedly finds shortest augmenting directed paths from the source node to the sink node in the parametric residual network and increases the flow in the original parametric network
, since the residual capacities of all arcs are linear functions. The algorithm repeatedly finds shortest augmenting directed paths from the source node to the sink node in the parametric residual network and increases the flow in the original parametric network  only in the subinterval
only in the subinterval  which reflects in updating the parametric residual network
which reflects in updating the parametric residual network . The parameter value
. The parameter value  is updated on each flow augmentation step so that the parametric residual capacities of all arcs not to have breakpoints within the interval
is updated on each flow augmentation step so that the parametric residual capacities of all arcs not to have breakpoints within the interval . During its successive iterations, the algorithm maintains an ordered list
. During its successive iterations, the algorithm maintains an ordered list  of parameter values for which the parametric network is partitioned. This list is initialised as
of parameter values for which the parametric network is partitioned. This list is initialised as  and is updated, each time the parametric residual network
and is updated, each time the parametric residual network contains no conditional augmenting directed path, with a new
contains no conditional augmenting directed path, with a new  value, representing the new lower limit of the subinterval of the parameter values for which a new parametric residual network
value, representing the new lower limit of the subinterval of the parameter values for which a new parametric residual network  is defined. At this point, the parametric maximum flow
is defined. At this point, the parametric maximum flow  is computed for the subinterval
is computed for the subinterval  and the algorithm goes on iterating within the next subinterval
and the algorithm goes on iterating within the next subinterval until the value
until the value  is reached.
is reached.
PARTITIONING ALGORITHM (PA);
1. BEGIN
2. compute a feasible flow  in network
in network ;
;
3. compute the parametric residual network ;
;
4. ;
; ;
; ;
;
5. REPEAT
6. SSADP ;
;
7.  ;
;
8. UNTIL ( );
);
9. END.
In the k-th step of the partitioning algorithm (PA), the Successive Shortest Augmenting Directed Paths (SSADP) procedure computes the parametric residual network for the subinterval
for the subinterval ,where the parametric residual capacities of all arcs can be written as
,where the parametric residual capacities of all arcs can be written as ,with
,with and
and . As can be easily seen, the restriction
. As can be easily seen, the restriction ,
, is equivalent with
is equivalent with .The SSADP procedure maintains a partly conditional augmenting directed path
.The SSADP procedure maintains a partly conditional augmenting directed path  which is memorised in the predecessor vector
which is memorised in the predecessor vector  and executes ADVANCE and RETREAT operations from the current node
and executes ADVANCE and RETREAT operations from the current node  until the sink node
until the sink node  is reached, i.e. the partly conditional augmenting directed path is transformed in a conditional augmenting directed path
is reached, i.e. the partly conditional augmenting directed path is transformed in a conditional augmenting directed path .
.
ADVANCE ; RETREAT
; RETREAT ;
;
1. BEGIN 1. BEGIN
2.  ; 2.
; 2. ;
;
3.  ; 3. IF
; 3. IF  THEN
THEN ;
;
4. END; 4. END
From a current node , an ADVANCE operation will add the admissible arc
, an ADVANCE operation will add the admissible arc  to the partly conditional augmenting directed path while a RETREAT operation will eliminate the arc
to the partly conditional augmenting directed path while a RETREAT operation will eliminate the arc  from it.
from it.
PROCEDURE SSADP ;
;
1. BEGIN
2. compute the parametrico residual network ;
;
3. compute the exact distance labels  in
in ;
;
4.  ;
; ;
; ;
; ;
; ;
;
5. WHILE  DO
DO
6. IF(exists an admissible arc ) THEN;
) THEN;
7. BEGIN
8. ADVANCE ;
;
9. IF  THEN
THEN
10. BEGIN
11. RC ;
;
12.  ;
;
13. END;
14. END;
15. ELSE RETREAT ;
;
16. compute the parametric maximum flow ;
;
17. add  to the list
to the list ;
;
18. END;
A call to Residual Capacity (RC) procedure will compute the parametric residual capacity  of the conditional augmenting directed path and will update the values
of the conditional augmenting directed path and will update the values  and
and  according to the augmentation of the flow. After initializing
according to the augmentation of the flow. After initializing and
and in order to assure that the parametric residual capacity
in order to assure that the parametric residual capacity remains a linear function without breakpoints in the subinterval
remains a linear function without breakpoints in the subinterval , the slope
, the slope  of the parametric residual capacity
of the parametric residual capacity  is compared with the slopes
is compared with the slopes of the parametric residual capacities of all the arcs
of the parametric residual capacities of all the arcs .
.
If the condition  holds for an arc
holds for an arc , it means that the linear functions
, it means that the linear functions  and
and  have a crossing point for a parameter value
have a crossing point for a parameter value  and, consequently, the parametric residual capacity
and, consequently, the parametric residual capacity  would have a breakpoint for
would have a breakpoint for .
.
If , i.e. the breakpoint is placed within the subinterval
, i.e. the breakpoint is placed within the subinterval , the upper limit
, the upper limit  will be replaced with the new parameter value
will be replaced with the new parameter value . Then, the parametric residual capacity
. Then, the parametric residual capacity  will be subtracted from the parametric residual capacities of all arcs
will be subtracted from the parametric residual capacities of all arcs  and added to those of the arcs
and added to those of the arcs , for all the parameter values in the new subinterval
, for all the parameter values in the new subinterval . As soon as
. As soon as  contains no conditional augmenting directed paths, the parametric maximum flow
contains no conditional augmenting directed paths, the parametric maximum flow  is computed for the subinterval
is computed for the subinterval  and the value
and the value is added to the list
is added to the list . Then the current value
. Then the current value  of the counter is incremented and, if the condition
of the counter is incremented and, if the condition  is not reached yet, the algorithm reiterates for the next subinterval
is not reached yet, the algorithm reiterates for the next subinterval . Otherwise, if
. Otherwise, if  equals
equals , the whole interval of the parameter has been completed and the algorithm stops. For each of the subintervals
, the whole interval of the parameter has been completed and the algorithm stops. For each of the subintervals ,
,  the parametric maximum flow is computed as
the parametric maximum flow is computed as
 .
.
PROCEDURE RC ;
;
1. BEGIN
2. compute  based on predecessor vector
based on predecessor vector ;
;
3.  ;
;
4.  ;
;
5.  ;
;
6. WHILE  DO
DO
7. BEGIN
8. IF  THEN
THEN
9. BEGIN
10.  ;
;
11. IF  THEN
THEN ;
;
12. END;
13.  ;
; ;
;
14.  ;
; ;
;
15.  ;
;
16. END;
17. END;
Theorem 3. The Successive Shortest Augmenting Directed Paths (SSADP) procedure correctly computes a parametric maximum flow in the parametric network for the parameter
for the parameter  values in the subinterval
values in the subinterval .
.
Proof. Since procedure SSADP works in the parametric residual network  for which the parametric residual capacities
for which the parametric residual capacities  of all arcs
of all arcs  and the parametric residual capacity
and the parametric residual capacity  of any of the augmenting directed paths
of any of the augmenting directed paths , are linear functions without crossing points within the subinterval
, are linear functions without crossing points within the subinterval , the correctness of the procedure results from the correctness of the shortest augmenting directed path algorithm for the non-parametric case.
, the correctness of the procedure results from the correctness of the shortest augmenting directed path algorithm for the non-parametric case.
Theorem 4. The Residual Capacity (RC) procedure correctly computes the parametric residual capacity
 of a conditional augmenting directed path
of a conditional augmenting directed path  in the parametric residual network
in the parametric residual network  for the parameter
for the parameter  values in the subinterval
values in the subinterval .
.
Proof. As the parametric residual capacity  is the inner envelope of the parametric residual capacity functions
is the inner envelope of the parametric residual capacity functions  of all arcs composing the conditional augmenting directed path and since these parametric residual capacities are linear functions for the entire subinterval
of all arcs composing the conditional augmenting directed path and since these parametric residual capacities are linear functions for the entire subinterval , the proof results from choosing the minimum possible values (lines 3 and 4 of procedure RC) for
, the proof results from choosing the minimum possible values (lines 3 and 4 of procedure RC) for  and for the corresponding
and for the corresponding , as well as from continuously updating (line 11 of procedure RC) the upper limit
, as well as from continuously updating (line 11 of procedure RC) the upper limit  of the subinterval for which the parametric residual network
of the subinterval for which the parametric residual network  is defined.
is defined.
Theorem 5. (Theorem of correctness) If there is a feasible flow in the parametric network , then the partitioning algorithm (PA) correctly computes a parametric maximum flow for
, then the partitioning algorithm (PA) correctly computes a parametric maximum flow for .
.
Proof. The partitioning algorithm iterates on successive subintervals , starting with
, starting with  and ending with
and ending with  and consequently, the correctness of the algorithm obviously follows from Theorem 3. Actually, the algorithm ends with a parametric maximum flow and with the partitioning of the interval of the parameter values:
and consequently, the correctness of the algorithm obviously follows from Theorem 3. Actually, the algorithm ends with a parametric maximum flow and with the partitioning of the interval of the parameter values: ,
, .
.
Theorem 6. (Theorem of complexity) The partitioning algorithm (PA) for the parametric maximum flow problem runs in  time, where
time, where  is the number of
is the number of  values in the set
values in the set  at the end of the algorithm.
at the end of the algorithm.
Proof. For each of the  subintervals
subintervals  ,
,  in which is partitioned the interval
in which is partitioned the interval  of the parameter values, the algorithm makes a call to procedure SSADP. Since the complexity of the procedure SSADP equals the complexity of the non-parametric successive shortest augmenting directed paths algorithm, being
of the parameter values, the algorithm makes a call to procedure SSADP. Since the complexity of the procedure SSADP equals the complexity of the non-parametric successive shortest augmenting directed paths algorithm, being , the total complexity of the partitioning algorithm is
, the total complexity of the partitioning algorithm is .
.
5. Example
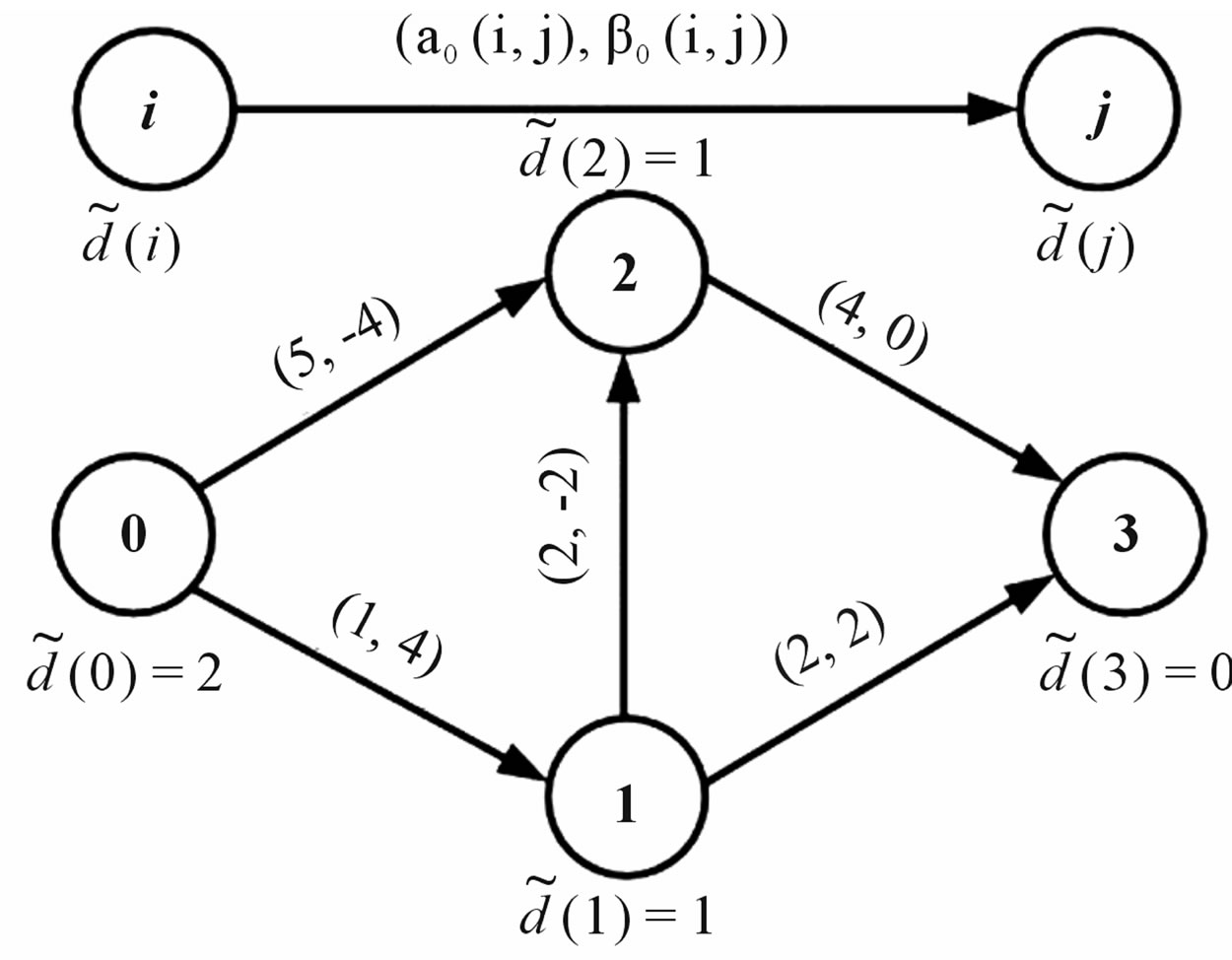
The algorithm is illustrated on the parametric network presented in Figure 1 where the source node is , the sink node
, the sink node , and for the parameter
, and for the parameter  taking values in the interval
taking values in the interval , i.e.
, i.e. .
.
The feasible flow , computed in the non-parametric network
, computed in the non-parametric network , is presented in Figure 2the parametric residual network
, is presented in Figure 2the parametric residual network  is presented in Figure 3 and the list B is initialised as
is presented in Figure 3 and the list B is initialised as .
.
In the first iteration, for  and
and , the algorithm makes the first call to procedure SSADP which computes the parametric residual network
, the algorithm makes the first call to procedure SSADP which computes the parametric residual network . The values computed for
. The values computed for  and
and , as well as the exact distance labels
, as well as the exact distance labels  in
in  are indicated in Figure 4(a). The predecessor vector is initialized as
are indicated in Figure 4(a). The predecessor vector is initialized as ,
,  and
and  are set to 0 and
are set to 0 and is set to
is set to . The algorithm performs two consecutive ADVANCE steps over the admissible arcs (0,1) and respectively (1,3) and, since the sink node is reached, procedure RC is called which builds the conditional augmenting directed path
. The algorithm performs two consecutive ADVANCE steps over the admissible arcs (0,1) and respectively (1,3) and, since the sink node is reached, procedure RC is called which builds the conditional augmenting directed path , based on the
, based on the

Figure 1. The parametric network  with linear capacity functions and constant lower bounds.
with linear capacity functions and constant lower bounds.

Figure 2. The feasible flow  in the non-parametric network
in the non-parametric network .
.

Figure 3. The parametric residual network .
.
 (a)
(a) (b)
(b) (c)
(c)
Figure 4. Exemplifying the first iteration performed by the partitioning algorithm (PA) for the parametric network  presented in Figure 1(a).
presented in Figure 1(a).
predecessor vector , and computes the values
, and computes the values  and
and , i.e. the parametric residual capacity
, i.e. the parametric residual capacity . The slope of the parametric residual capacity is compared with the slopes
. The slope of the parametric residual capacity is compared with the slopes of the parametric residual capacities of the arcs (1,3) and (0,1). Since the condition
of the parametric residual capacities of the arcs (1,3) and (0,1). Since the condition  holds for the arc (1,3), the value
holds for the arc (1,3), the value  is computed and because
is computed and because , the upper limit of the subinterval of the parameter values is updated to
, the upper limit of the subinterval of the parameter values is updated to . Then the values
. Then the values  and
and  are updated for both arcs (1,3) and (0,1) and procedure RC ends with the parametric residual network
are updated for both arcs (1,3) and (0,1) and procedure RC ends with the parametric residual network  presented in Figure 4(b).Then, procedure SSADP makes two ADVANCE steps over the arcs (0,2) and (2,3) reaching again the sink node and procedure RC builds the new conditional augmenting directed path
presented in Figure 4(b).Then, procedure SSADP makes two ADVANCE steps over the arcs (0,2) and (2,3) reaching again the sink node and procedure RC builds the new conditional augmenting directed path  with the parametric residual capacity
with the parametric residual capacity , i.e.
, i.e.  and
and .For the arc (0,2), the value
.For the arc (0,2), the value  is computed and since
is computed and since  the upper limit of the subinterval
the upper limit of the subinterval  is updated to
is updated to .
.
Procedure SSADP selects again the admissible arc (0,2) and, since from node 2 there is no admissible arc, it is relabelled as  and a RETREAT step is performed to
and a RETREAT step is performed to . At this stage, there is no admissible arc in
. At this stage, there is no admissible arc in  from the current node
from the current node  and therefore, after relabeling node 0 as
and therefore, after relabeling node 0 as , this label does not meet the restriction
, this label does not meet the restriction . Based on the residual capacities presented in Figure 4(c), the parametric flow
. Based on the residual capacities presented in Figure 4(c), the parametric flow  (Figure 5(a))is computed for the parameter values in the subinterval
(Figure 5(a))is computed for the parameter values in the subinterval and the value
and the value  is added to the list B which becomes
is added to the list B which becomes . After the procedure SSADP ends, the current value of the counter
. After the procedure SSADP ends, the current value of the counter
 (a)
(a) (b)
(b)
Figure 5. The parametric maximum flow for each of the subintervals Jk, k = 0, 1, 2, 3 of the parameter values: (a) J0 = [0, 1/4]; (b) J1 = [1/4, 1/2]; (c) J2 = [1/2, 3/4]; (d) J3 = [3/4, 1].
is incremented to  and, since
and, since , a new iteration will be performed.
, a new iteration will be performed.
After performing three more iterations, the value  is added to the list B which becomes
is added to the list B which becomes
 and the current value of the counter is incremented to
and the current value of the counter is incremented to . Since
. Since , the partitioning algorithm ends. The parametric maximum flows computed by the algorithm are presented in Figure 5.
, the partitioning algorithm ends. The parametric maximum flows computed by the algorithm are presented in Figure 5.
As can be noticed in Figure 5, the parametric maximum flow value function  equals the capacity function
equals the capacity function , with
, with ,
,  , of the parametric minimum cut in the parametric network.
, of the parametric minimum cut in the parametric network.
REFERENCES
- R. Ahuja, T. Magnanti and J. Orlin, “Network Flows. Theory, Algorithms and Applications,” Prentice Hall Inc., Englewood Cliffs, 1993.
- H. W. Hamacher and L. R. Foulds, “Algorithms for Flows with Parametric Capacities,” ZOR—Methods and Models of Operations Research, Vol. 33, No. 1, 1989, pp. 21-37.
- G. Ruhe, “Complexity Results for Multicriterial and Parametric Network Flows Using a Pathological Graph of Zadeh,” Zeitschrift für Operations Research, Vol. 32, No. 1, 1988, pp. 9-27.
- G. Ruhe, “Characterization of All Optimal Solutions and Parametric Maximal Flows in Networks,” Optimization, Vol. 16, No. 1, 1985, pp. 51-61. http://dx.doi.org/10.1080/02331938508842988
- C.-E. Bichot and P. Siarry, “Graph Partitioning: Optimisation and Applications,” ISTE—Wiley, 2011.
- E. Ciurea and L. Ciupală, “About Preflow Algorithms for the Minimum Flow Problem,” WSEAS Transactions on Computer Research, Vol. 1, No. 3, 2008, pp. 35-42.
- E. Ciurea and L. Ciupală, “Sequential and Parallel Algorithms for Minimum Flows,” Journal of Applied Mathematics and Computing, Vol. 15, No. 1-2, 2004, pp. 53.E- 75.E.
- G. Gallo, M. D. Grigoriadis and R. E. Tarjan, “A Fast Parametric Maximum Flow Algorithm and Applications,” SIAM Journal on Computing, Vol. 18, No. 1, 1989, pp. 30-55. http://dx.doi.org/10.1137/0218003
- M. Parpalea, “Min-Max Algorithm for the Parametric Flow Problem,” Bulletin of the Transilvania University of Brasov, Series III: Mathematics, Informatics, Physics, Vol. 3, No. 52, 2010, pp. 191-198.