1. Introduction
This paper concerns a geometric structure on
-manifolds which is related with CR-structure and also quaternionic CR-structure (cf. [1] [2] ). Given a quaternionic CR-structure
on a
-manifold M, we have proved in [3] that the associated endomorphism
on the 4n-bundle
naturally extends to a complex structure
on
. So we obtain 3 CR-structures on M. Taking into account this fact, we study the following geometric structure on
-manifolds globally.
A hypercomplex 3 CR-structure on a
-manifold M consists of (positive definite) 3 pseudo-Hermitian structures
on M which satisfies that
1)
is a 4n-dimensional subbundle of TM such that
.
2) Each
coincides with the endomorphism
such that
constitutes a hypercomplex structure on
.
We call the pair
also a hypercomplex 3 CR-structure if it is represented by such pseudo-Hermitian structures on M. A quaternionic CR- structure is an example of our hypercomplex 3 CR-structure. As Sasakian 3- structure is equivalent with quaternionic CR-structure, Sasakian 3-structure is also an example. Especially the
-dimensional standard sphere
is a hypercomplex 3 CR-manifold. The pair
is the spherical homogeneous model of hypercomplex 3 CR-structure in the sense of Cartan geometry (cf. [4] ). First we study the properties of hypercomplex 3 CR-structure. Next we introduce a quaternionic 3 CR-structure on M in a local manner. In fact, let
be a 4n-dimensional subbundle endowed with a quaternionic structure Q on a
-manifold M. The pair
is called quaternionic 3 CR-structure if the following conditions hold:
1)
;
2) M has an open cover
each
of which admits a hypercomplex 3 CR-structure
such that:
a)
;
b) Each hypercomplex structure
on
generates a quaternionic structure Q on
.
A
-manifold equipped with this structure is said to be a quaternionic 3 CR-manifold. A typical example of a quaternionic 3 CR-manifold but not a hypercomplex 3 CR-manifold is a quaterninic Heisenberg nilmanifold. In this paper, we shall study an invariant for quaternionic 3 CR-structure on
- manifolds.
Theorem A. Let
be a quaternionic 3 CR-manifold. There exists a pseudo-Riemannian metric g of type
on
. Then the con- formal class
is an invariant for quaternionic 3 CR-structure.
As well as the spherical quaternionic 3 CR homogeneous manifold
, we have the pseudo-Riemannian homogeneous manifold
which is a two-fold covering of the pseudo-Riemannian homogeneous manifold
. The pair
is a subgeometry of conformally flat pseudo-Riemannian homogeneous geometry
where
.
Theorem B. A quaternionic 3 CR-manifold M is spherical (i.e. locally modeled on
) if and only if the pseudo-Riemannian manifold
is conformally flat, more precisely it is locally modeled on
.
We have constructed a conformal invariant on
-dimensional pseudo- conformal quaternionic CR manifolds in [3] . We think that the Weyl conformal curvature of our new pseudo-Riemannian metric obtained in Theorem A is theoretically the same as this invariant in view of Uniformization Theorem B. But we do not know whether they coincide.
Section 2 is a review of previous results and to give some definition of our notion. In Section 3 we prove the conformal equivalence of our pseudo-Riemannian metrics and prove Theorem A. In Section 4 first we relate our spherical 3 CR-homogeneous model
and the conformally flat pseudo-Riemannian homogeneous model
. We study properties of 3-dimensional lightlike groups with respect to the pseudo- Riemannian metric
of type
on
. We apply these results to prove Theorem B.
2. Preliminaries
Let
be a (4n + 3)-dimensional hypercomplex 3 CR-manifold. Put
for one of α’s. By the definition,
is a CR-manifold. Let
be the canonical bundle over M (i.e. the
-line bundle of complex
-forms). Put
which is a principal bundle:
. Compare [ [5] , Section 2.2]. Fefferman [6] has shown that
admits a Lorentz metric g for which the Lorentz isometries
induce a lightlike vector field. We recognize the following definition from pseudo-Riemannian geometry.
Definition 1. In general if
induces a lightlike vector field with respect to a Lorentz metric of a Lorentz manifold, then
is said to be a lightlike group acting as Lorentz isometries. Similarly if each generator
of
is chosen to be a lightlike group, then we call
also a lightlike group.
We recall a construction of the Fefferman-Lorentz metric from [5] (cf. [6] ). Let
be the Reeb vector field for
. The circle
generates the vector field
on
. Define
to be a 1-form on
such that
(2.1)
In [ [5] , (3.4) Proposition] J. Lee has shown that there exists a unique real 1-form
on
. The explicit form of
is obtained from [ [5] , (5.1) Theorem] in this case:
(2.2)
Here 1-forms
are connection forms of
such that
(2.3)
The function R is the Webster scalar curvature on M. Note from (2.2)
(2.4)
Normalize
so that we may assume
. Let
denote the symmetric 2-form defined by
. Since
, it follows
. The Fefferman-Lorentz metric for
on
is defined by
(2.5)
Here
. Since
is the Reeb field,
. As
,
. On the other hand,
by the definition. We have
(2.6)
Thus g becomes a Lorentz metric on
in which
is a lightlike group.
Theorem 2 ( [5] ). If
, then
.
3. Hypercomplex 3 CR-Structure
Our strategy is as follows: first we construct a pseudo-Riemannian metric locally on each neighborhood of
by Condition I below and then sew these metrics on each intersection to get a globally defined pseudo-Riemannian metric on
using Theorem 4. (See the proof of Theorem A.)
Suppose that
is a hypercomplex 3 CR-manifold of dimension
. Put
. It is an
-valued 1-form annihilating
. In general, there is no canonical choice of
annihilating
. In [ [3] , Lemma 1.3] we observed that if
is another
-valued 1-form annihilating
, then
(3.1)
for some
-valued function
on M. (Here
is the quaternion conjugate.) If we put
for a positive function u and
, then
such that the map
represents a matrix function
. If
is a hypercomplex structure on
for
, then they are related as
.
For each
, we obtain a unique real 1-form
on
from Section 2 (cf. (2.2)). First of all we construct a pseudo-Riemannian metric on
. In general
is a nontrivial principal
-bundle. It is the trivial bundle when we restrict to a neighborhood. So for our use we assume:
Condition I.
is trivial as bundle, i.e.
.
We construct a 1-form
on
as follows. Let
generate
,
,
of
respectively. Obtained as in (2.2), we have
’s on each
such that
We then extend
to
by setting
(3.2)
Since
on
,
. Note that for any
,
(3.3)
On the other hand, we recall the following from [ [3] , Lemma 4.1].
Proposition 3. The following hold:
In particular
is a positive definite invariant symmetric bilinear form on
;
Choose a frame field
on
such that
with
. Let
be the dual frame to
such that
(3.4)
Let
be the Reeb field for
respectively. There is a decomposition
.
As before let
be a symmetric 2-form. Define a pseudo-Riemannian metric on
by
(3.5)
As in (2.6) it follows that
,
. If we note
, letting
, it follows
. So
. As
is positive definite from Proposition 3, g is a pseudo-Riemannian metric of type
on
.
Theorem 4. Let
be the pseudo-Riemannian metric on
corre- sponding to another
-valued 1-form
on M representing
, i.e.
, then
.
We divide a proof according to whether
or
.
Proposition 5. If
, then
.
Proof. (Existence.) Suppose
. We show the existence of such a 1-form
for
. Let
be the frame on
for
. Then
determines another frame
. Since each
generates the same
as that of
, note
(3.6)
Let
be the frame on
. Then the Reeb field
for each
is described as
(3.7)
. As
on
and
from Proposition 3, there exists a matrix
such that
(3.8)
Two frames
,
give the coframes
,
on
respectively. Then the above Equations (3.6), (3.7), (3.8) determine the relations between coframes:
(3.9)
Moreover if we put
(3.10)
then (3.15) and (3.10) show that
for which
If
is a symmetric matrix defined by
(3.11)
it is easily checked that
.
Letting
and
, we define a pseudo- Riemannian metric
(3.12)
Then a calculation shows
(3.13)
(Uniqueness.) We prove the above
is uniquely determined with respect to
. Let
be the coframe for
where
. We have a Fefferman-Lorentz metric on
from (3.5) and (3.4) under Condition I:
(3.14)
(We take the coefficient
for our use.) When
, the coframe
will be transformed into a coframe
such as
(3.15)
.
If
is the corresponding metric on
, then
by Theorem 2 and there exists a unique 1-form
such that
(3.16)
If we sum up this equality for
;
which yields
(3.17)
Compared this with (3.13) it follows
(3.18)
By uniqueness of
,
defined by (3.10) is a unique real 1-form with respect to
.
Next put
. The conjugate
represents a
matrix
. Then it follows
(3.19)
By our definition, a hypercomplex structure
on
satisfies that
. A new hypercomplex structure on
is described as
(3.20)
Differentiate (3.19) and restrict to
(in fact,
on
), using Proposition 3, a calculation shows
(3.21)
In particular, we have
.
Proposition 6. If
, then
.
Proof. Let
. Since
is uniquely determined by
and
from (3.19), it implies that
(3.22)
Note that
(3.23)
By (3.21),
Proof of Theorem 4. Suppose
where
. It follows from Proposition 5 that
. By Proposition 6, we have
and hence
. This finishes the proof under Condition I.
Proof of Theorem A
Proof. Let
be a quaternionic 3 CR-manifold. Then M has an open cover
where each
admits a hypercomplex 3 CR-structure
. Put
which is an
-valued 1-form on
. Since we may assume that
is homeomorphic to a ball (i.e. contractible), Condition I is satisfied for each
, i.e.
. Then we have a pseudo-Riemannian metric
on
for
by Theorem 4. Suppose
. By condition a) of 2) (cf. Introduction),
. Then by the equivalence (3.1) there exists a function
defined on
such that
(3.24)
It follows from Theorem 4 that
on
. We may put
which is a positive function defined on
. By construction, it is easy to see that
on
. This implies that
defines a 1-cocycle on M. Since
is a fine sheaf as the germ of local continuous functions, note that the first cohomology
. (Here
is a chain complex of covers running over all open covers of M.) Therefore there exists a local function
defined on each
such that
, i.e.
on
. We obtain that
Then we may define
(3.25)
so that g is a globally defined pseudo-Riemannian metric on
. If another family
represents the same quaternionic 3 CR-structure
, then the same argument shows that
on
for some positive function. Hence the conformal class
is an invariant for quaternionic 3 CR-structure. In particular, the Weyl curvature tensor
is also an invariant. This completes the proof of Theorem A.
4. Model Geometry and Transformations
We introduce spherical 3 CR-homogeneous model
and conformally flat pseudo-Riemannian homogeneous model
equipped with pseudo-Riemannian metric
of type
and then characterize the lightlike subgroup in
.
4.1. Pseudo-Riemannian Metric g0
Let us start with the quaternionic vector space
endowed with the Her- mitian form:
(4.1)
The q-cone is defined by
(4.2)
When
is viewed as the real vector space
,
denotes the full subgroup of
preserving the bilinear form
. Consider the commutative diagrams below. The image of the pair
by the projection
is the homogeneous model of conformally flat pseudo-Riemannian geometry
in which
is diffeomorphic to a quotient manifold
. The identification
gives a natural embedding
which results a special geometry
from
.
As usual, the image of
by
is spherical quarter- nionic 3 CR-geometry
.
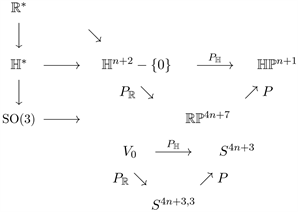 (4.3)
(4.3)
We describe a pseudo-Riemannian metric
on
. Let
be the product of unit spheres. For
,
so
. Then
induces a 2-fold covering
for which
is an isomorphism.
Let
where we put
. Choose
such that
. Denote by
the orthogonal complement in
with respect to
. As
, it follows
such that
In particular,
. Note that this decomposition does not depend on the choice of points
and
with
. (see [3] , Theorem 6.1]). We define a pseudo-Riemannian metric on
to be
(4.4)
Noting
,
and
is positive definite,
is a pseudo-Riemannian metric of type
at each
.
4.2. Conformal Group
It is known more or less but we need to check that
acts on
as conformal transformations with respect to
and so does
on
.
For any
,
so
. However
does not necessarily belong to
. Normalized
, there is
such that
for some
. Note
. If
is the right multiplication defined by
, then there is the commutative diagram:

in which
. As
, we have
for some
,
. Since
and
is equivariant, it follows
Similarly
for
for some
,
. As
, a calculation shows
Hence
acts as conformal transformation with respect to
.
4.3. Conformal Subgroup
Let
be the standard hypercomplex structure on
defined by
Put
as the associated quaternionic structure. Then
leaves invariant Q. The full subgroup of
preserving Q is isomorphic to
, i.e. the intersection of
with
.
Let
be a faithful representation. Then the subgroup
preserves Q so it is contained in
which is a subgroup of
.
4.4. Three Dimensional Lightlike Group
Choose
and consider a representation restricted to
. As we may assume that the semisimple group
belongs to
, this reduces to a faithful representation:
such that
(4.5)
Here we may assume that
are relatively prime
without loss of generality, and either
or 1. The element
acts on
as
(4.6)
where
for
. If X is the vector field induced by
at
, then it follows
(4.7)
Proposition 7. If
is a faithful lightlike 1-parameter group, then it has either one of the forms:
(4.8)
Proof. Case (i)
.
from (4.7) so that
. Since
and we assume
, it follows
As
’s are relatively prime, this implies
As a consequence
. In this case note that
such that
.
Case (ii)
. It follows from (4.7) that
Put
,
such that
and
. Calculate
(4.9)
This shows
Thus
(4.10)
On the other hand, we may assume in general
(ii-1). Suppose
. As
for
, it implies
. Since
from (4.10), it follows
. Again from (4.10),
and so
. Note that
because
. Thus
. This implies
.
(ii-2). Suppose
. In this case
. By (4.10), it follows that
and
,
. Thus
. This contradicts that nonzero
’s
are relatively prime.
(ii-3). Suppose
and
. Again
and so
.
To complete the proof of the proposition we prove the following. Put
such that
.
Lemma 8. Case (ii-1) does not occur.
Proof. It follows from (4.7) that
(4.11)
Put
Then
As
implies
. On the other hand, the equation
shows
Note that if
is the canonical subset in
then
if and only if
Since X is a nontrivial vector field on
there is a point x in the open subset
such that
and thus
on S, which contradicts that X is a lightlike vector field.
4.5. Proof of Theorem B
Applying Proposition 7 to a lightlike group
we obtain:
Corollary 9. Let
be a faithful representation which preserves the metric
on
. If
is a lightlike group on
, then either one of the following holds.
(4.13)
Let
be as in (4.13). If
is a map defined by
, then for
,
,
So the equivariant diffeomorphism
induces a quotient equivariant diffeomorphism
(4.14)
We prove Theorem B of Introduction.
Proof. Suppose that the pseudo-Riemannian manifold
is conformally flat. Let
be the fundamental group and
the universal covering of M. By the developing argument (cf. [7] ), there is a developing pair:
where
is a conformal immersion such that
for some positive function u on
and
is a holonomy homomorphism for which
is equivariant with respect to
.
By Corollary 9, if
, then the normalizer of
in
is isomorphic to
. In particular,
where
. We have the commutative diagram:
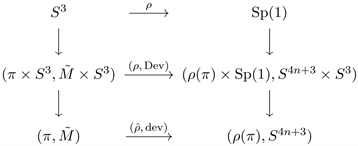 (4.15)
(4.15)
where
and
is an immersion which is
- equivariant.
If
from (4.13), then
. Composed
with
, we have an equivariant diffeomorphism
where
. In each case taking the developing map either
of (4.15) or
, a quaternionic 3 CR-manifold M is spherical, i.e. uniformized with respect to
.
Conversely recall
is the standard quaternionic 3 CR-structure on
equipped with the standard hypercomplex structure
on
. Suppose that
is a spherical quaternionic 3 CR-structure on M with a quaternionic structure Q, then there exists a developing map
such that
for some
-valued function
on
with a lift of quaternionic 3 CR-structure
. In particular,
and
.
Let
be a pseudo-Riemannian metric on
for
which is a lift of
and
to
respectively. Put
. Let
be a function for
and
such that
By the definition, recall
. The induced quaternionic structure
for
is obtained as
. Since
, taking
, we obtain
(4.16)
As
, note that
.
On the other hand, let
be the pseudo-Riemannian metric on
for
, it follows from Theorem 4
(4.17)
Take the above element
and let
be a homomorphism defined by
. Define a map
which makes the diagram commutative. (Here p is the projection onto the left summand.)
 (4.18)
(4.18)
where both
and
are isomorphisms such that
(4.19)
Recall from (3.5) that
. (We write p more pre- cisely.) Consider the pull-back metric
(4.20)
Calculate the first and the second summand of (4.20) respectively.
(4.21)
(4.22)
Thus
Then it follows by the construction of (3.5) that
is the corresponding pseudo-Riemannian metric for
and so
by (4.17). Therefore
is conformally flat and so is
.