S. MIKKILI ET AL.
Copyright © 2011 SciRes. ICA
381
Figure 14. THD for id-iq method with fuzzy controller using Matlab and RTDS hardware.
7. Conclusions [5] S. Mikkili, A. K. Panda and S. Yellasiri, “RTDS Hard-
ware Implementation and Simulation of 3-ph 4-Wire
SHAF for Mitigation of Current Harmonics Using p-q
Control Strategy with Fuzzy Controller,” Journal of
Power Electronics & Power Systems, Vol. 1, No. 1, 2011,
pp. 13-23.
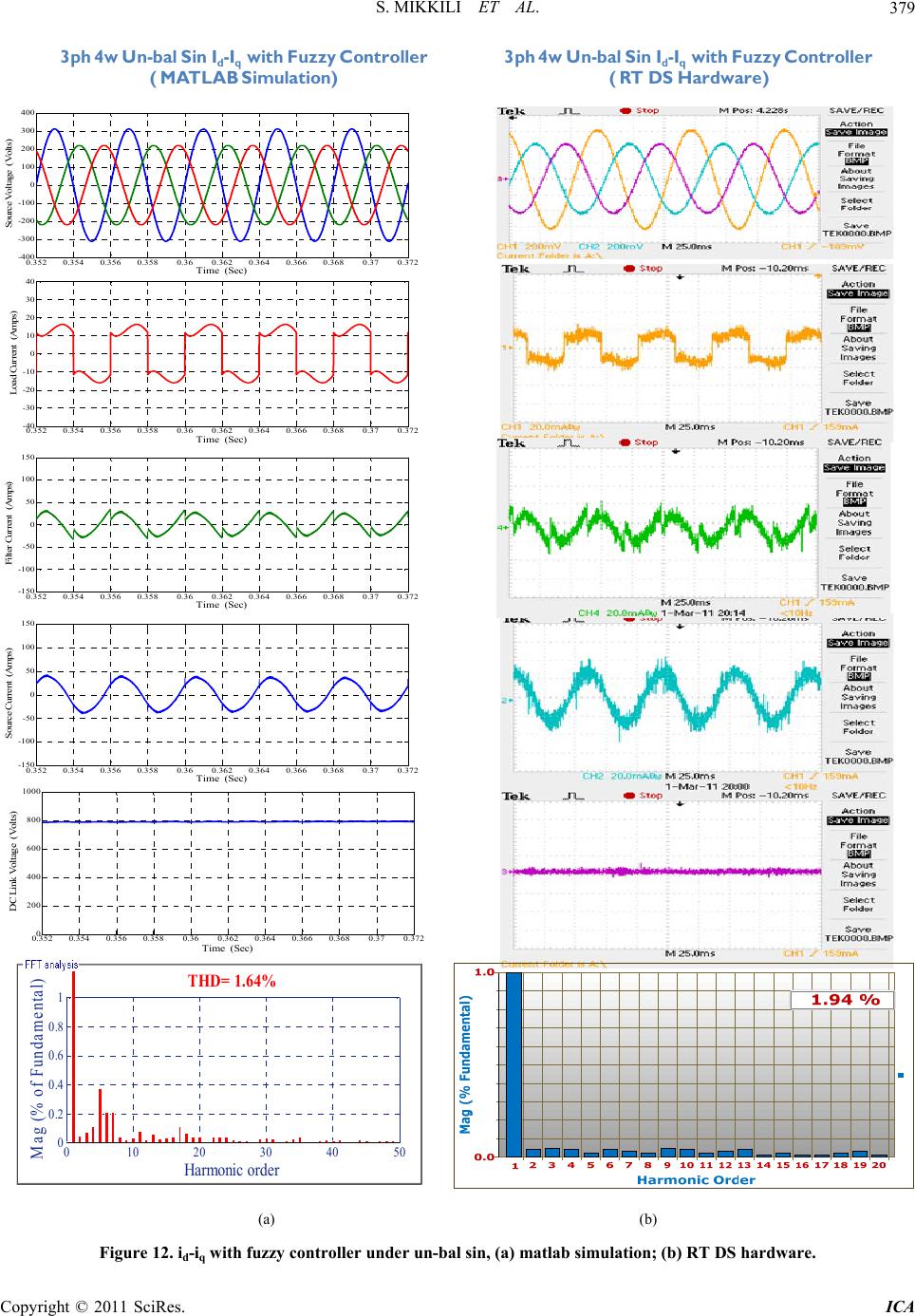
In the present paper instantaneous active and Reactive
current control strategy with Fuzzy controller is devel-
oped to mitigate the current harmonics in three phase
four wire system using Matlab/simulink environment and
it verified with Real Time Digital Simulator. This control
strategy is capable to suppress the harmonics in the sys-
tem during balanced sinusoidal, un-balanced sinusoidal
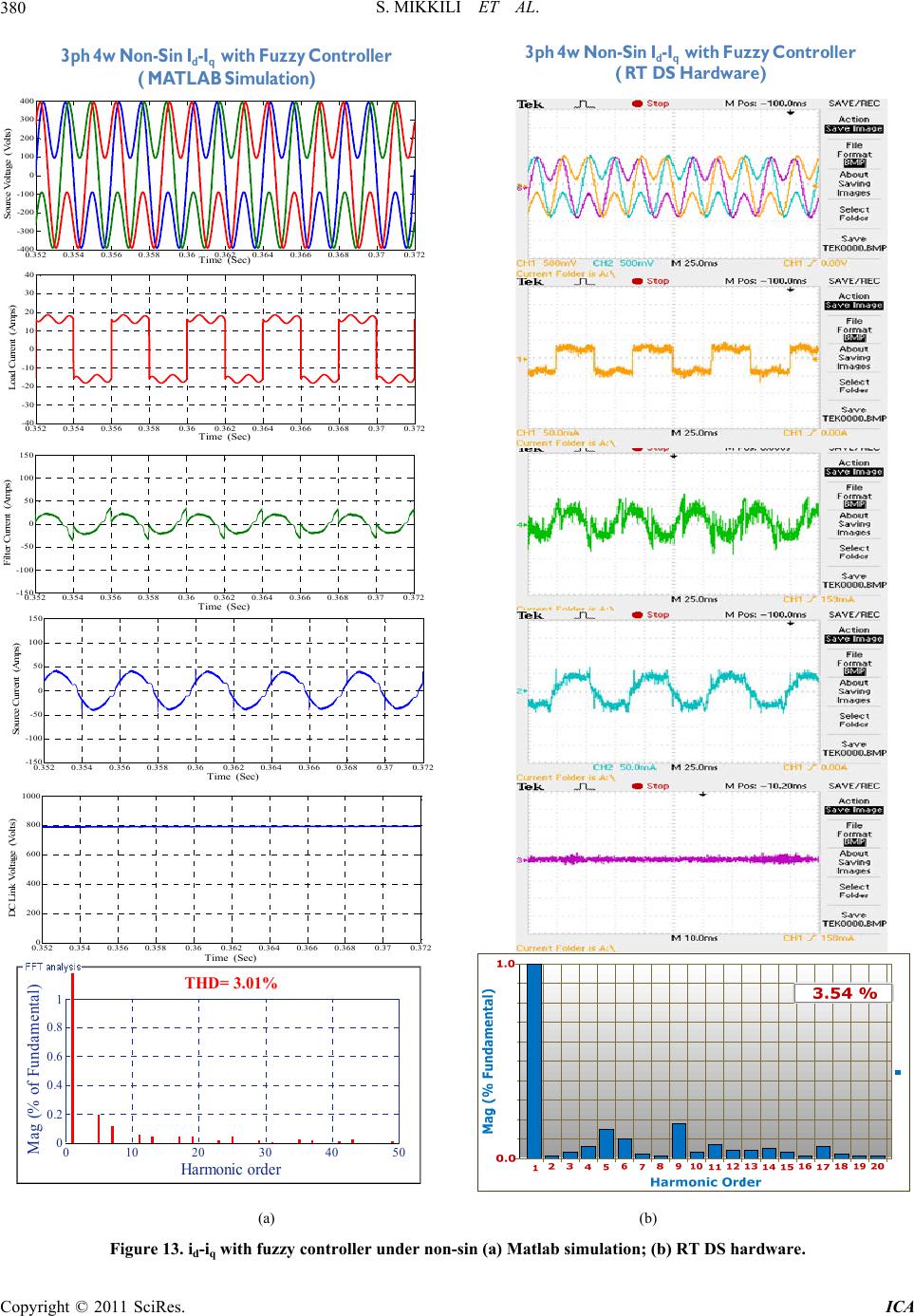
and balanced non-sinusoidal conditions. The p-q control
strategy is unable to yield an adequate solution when
source voltages are not ideal. p-q theory needs additional
PLL circuit for synchronization so p-q method is fre-
quency variant, where as in id-iq method angle “θ” is
calculated directly from main voltages and thus enables
the method to be frequency independent. Thus large
numbers of synchronization problems with un-balanced
and non-sinusoidal voltages are also avoided. Addition to
that DC voltage regulation system valid to be a stable
and steady-state error free system was obtained.
[6] F. Z. Peng, G. W. Ott Jr. and D. J. Adams, “Harmonic and
reactive Power Compensation Based on the Generalized
Instantaneous Reactive Power Theory for Three-Phase
Four-Wire Systems,” IEEE Transactions on Power Elec-
tronics, Vol. 13, No. 5, 1998, pp. 1174-1181.
doi:10.1109/63.728344
[7] V. Soares, P. Verdelho and G. Marques, “Active Power
Filter Control Circuit Based on the Instantaneous Active
and Reactive Current id-iq Method,” IEEE Power Elec-
tronics Specialists Conference, St. Louis, 22-27 June
1997, pp. 1096-1101.
[8] M. I. M. Montero, E. R. Cadaval and F. B. Gonzalez,
“Comparison of Control Strategies for Shunt Active
Power Filters in Three-Phase Four Wire Systems,” IEEE
Transactions on Power Electronics, Vol. 22, No. 1, 2007,
pp. 229-236. doi:10.1109/TPEL.2006.886616
[9] M. Aredes, J. Hafner and K. Heumann, “Three-Phase
4-Wire Shunt Active Filter Control Strategies,” IEEE
Transactions on Power Electronics, Vol. 12, No. 2, 1997,
pp. 311-318. doi:10.1109/63.558748
8. References
[1] H. Akagi, Y. Kanazawa and A. Nabae, “instantaneous
Reactive Power Compensators Comprising Switching
Devices without Energy Storage Components,” IEEE
Transactions on Industry Applications, Vol. IA-20, No. 3,
1984, pp. 625-630.
[10] P. Rodriguez, J. I. Candela, A. Luna and L. Asiminoaei,
“Current Harmonics Cancellation in Three-Phase Four-
Wire Systems by Using a Four-Branch Star Filtering To-
pology,” IEEE Transactions on Power Electronics, Vol.
24, No. 8, 200, pp. 1939-19509.
doi:10.1109/TPEL.2009.2017810
[2] L. Gyugyi and E. C. Strycula, “Active AC Power Filters,”
IEEE IIAS Annual Meeting, Cincinnati, 1976, pp. 529-535.
[3] M. Suresh, A. K. Panda and Y. Suresh, “Fuzzy Controller
Based 3Phase 4Wire Shunt Active Filter for Mitigation of
current Harmonics with Combined p-q and id-iq Control
Strategies,” Journal of Energy and Power Engineering,
Vol. 3, No. 1, 2011, pp. 43-52.
doi:10.4236/epe.2011.31007
[11] P. Salmeron and R. S. Herrera, “Distorted and Unbal-
anced Systems Compensation within Instantaneous Reac-
tive Power Framework,” IEEE Transactions on Power
Delivery, Vol. 21, No. 3, 2006, pp. 1655-1662.
doi:10.1109/TPWRD.2006.874115
[12] S. Mikkili and A. K. Panda, “APF for Mitigation of Cur-
rent Harmonics with p-q and id-iq Control Strategies Us-
ing PI Controller,” Journal of Trends in Electrical Engi-
neering, Vol. 1, No. 1, 2011, pp. 1-11.
[4] H. Akagi, “New Trends in Active Filters for Power Con-
ditioning,” IEEE Transactions on Industry Applications,
Vol. 32, No. 6, 1996, pp. 1312-1322.