Influence of Inhomogeneity and Initial Stress on the Transient Magneto-Thermo-Visco-Elastic Stress Waves in an Anisotropic Solid ()
1. Introduction
An increasing attention is being devoted to the interaction between magnetic field and strain field in an initially stressed anisotropic viscoelastic solid due to its many applications in modern aeronautics, astronautics, earthquake engineering, soil dynamics, nuclear reactors and high-energy particle accelerators. In recent years, an important number of engineering and mathematical papers devoted to the numerical solution have studied the overall behavior of such materials. El-Naggar, et al. [1,2] proposed explicit finite difference scheme to obtain thermal stresses in a non-homogeneous media. The boundary element method is well known for its accuracy and efficiency in stress analysis (see, for example, Brebbia and Nardini [3], Wrobel and Brebbia [4], Partridge, et al. [5], Divo and Kassab [6], Gaul, et al. [7], Matsumoto, et al. [8], Fahmy [9-11], Davi and Milazzo [12]).
The idea of the present paper is to study the transient magneto-thermo-visco-elastic stresses in a non-homogeneous anisotropic initially stressed solid. The formulation is tested through its application to the problem of a solid placed in a constant primary magnetic field acting in the direction of the z-axis. The governing equations are solved by means of a dual reciprocity boundary element method (DRBEM) and then numerical calculations are made for the temperature, displacement components and thermal stress components. The validity of DRBEM is examined by considering a magneto-thermo-viscoelastic solid occupies a rectangular region and good agreement is obtained with existent results. The results indicate that the effects of initial stress and inhomogeneity are very pronounced.
2. Formulation of the Problem
Here, we present the basic equations of the theory of magneto-thermoviscoelasticity, which will be used for the solution of the problem described above. With reference to a Cartesian frame denoted by 0xyz, consider an initially stressed anisotropic solid is placed in a constant primary magnetic field H0, acting in the direction of the z-axis. Here we address the generalized two-dimensional deformation problem in xy-plane only, therefore all the variables are constant along the z-axis. In the 0xy plane, the solid occupies the region
 which is bounded by a simple closed curve C.
which is bounded by a simple closed curve C.
In non-dimensional form the governing equations of magneto-thermo-viscoelasticity for an anisotropic solid can be written as follows (see Fahmy and El-Shahat [13])
 (1)
(1)
 (2)
(2)
 (3)
(3)
 (4)
(4)
 (5)
(5)
The initial and boundary conditions for the current problem are assumed to be written as
 (6)
(6)
 (7)
(7)
 (8)
(8)
 (9)
(9)
 (10)
(10)
 (11)
(11)
where  and
and  are the same expressions
are the same expressions  and
and  respectively,
respectively,  is the mechanical stress tensor,
is the mechanical stress tensor,  Maxwell’s electromagnetic stress tensor,
Maxwell’s electromagnetic stress tensor,  is the displacement, T is the temperature,
is the displacement, T is the temperature,  is the initial stress in the solid,
is the initial stress in the solid,  and
and  are respectively, the constant elastic moduli and stress-temperature coefficients of the anisotropic medium,
are respectively, the constant elastic moduli and stress-temperature coefficients of the anisotropic medium,  is the viscoelastic material constant,
is the viscoelastic material constant,  is the magnetic permeability,
is the magnetic permeability,  is the perturbed magnetic field,
is the perturbed magnetic field,  are the thermal conductivity coefficients satisfying the symmetry relation
are the thermal conductivity coefficients satisfying the symmetry relation  and the strict inequality
and the strict inequality  holds at all points in the medium,
holds at all points in the medium,  is the density,
is the density,  is the specific heat capacity of the solid and
is the specific heat capacity of the solid and  is the dimensionless time,
is the dimensionless time,  is the heat source density and
is the heat source density and  is the Euclidean distance between the field point
is the Euclidean distance between the field point  and the load point
and the load point . Also,
. Also,  ,
,  and
and  are suitably prescribed functions of
are suitably prescribed functions of ,
,  is suitably prescribed function of
is suitably prescribed function of ,
,  and
and  are nonintersecting curves such that
are nonintersecting curves such that ,
,  and
and  are non-intersecting curves such that
are non-intersecting curves such that  and
and  are the tractions defined by
are the tractions defined by .
.
A superposed dot denotes differentiation with respect to the time and a comma followed by a subscript denotes partial differentiation with respect to the corresponding coordinates.
We focus our attention to the case of inhomogeneity along x-axis, so we characterize the elastic constants , magnetic permeability
, magnetic permeability , initial stress
, initial stress , thermal conductivity coefficients
, thermal conductivity coefficients  and density
and density  of non-homogeneous material by
of non-homogeneous material by
 (12)
(12)
 (13)
(13)
where ,
,  ,
,  ,
,  and
and  are constants (the values of
are constants (the values of ,
,  ,
,  ,
,  and
and 
 in homogeneous matter) and m is a rational numbers.
in homogeneous matter) and m is a rational numbers.
In terms of the definitions (12) and (13), Equations (1) and (5) can be written as follows
 (14)
(14)
 (15)
(15)
With the heat flux vector  given by Fourier’s law
given by Fourier’s law
 (16)
(16)
where  and
and  are taken to be constant in
are taken to be constant in .
.
It is usually difficult to find out the analytical solutions of such state equations except for some special cases.
3. Numerical Implementation
The main objective of the numerical implementation is to describe the implementation of the DRBEM formulation for the solution of the equations (14) and (15). A more extensive historical review and applications of dual reciprocity boundary element method may be found in Brebbia, et al. [14], Partridge and Wrobel [15], Nardini and Brebbia [16], Albuquerque, et al. [17].
3.1. Temperature Field
Weighting (15) with a test function  yields
yields
 (17)
(17)
Applying Gauss’s theorem, integration by parts, Green’s second identity and sifting property of the Dirac distribution, we obtain the representation formula
 (18)
(18)
According to the DRBEM, the surface of the solid has to be discretized into boundary elements. In order to make the implementation easy to compute, we use  collocation points on the boundary
collocation points on the boundary  and another
and another  in the interior of
in the interior of  so that the total number of interpolation points is
so that the total number of interpolation points is .
.
According to Cho, et al. [18], a function of the form

where  is a continuous function in the
is a continuous function in the  -plane and
-plane and  is a polynomial of degree
is a polynomial of degree  is called a radial basis function (RBF). The importance of splines is that they can provide interpolatory approximations to
is called a radial basis function (RBF). The importance of splines is that they can provide interpolatory approximations to  for very general sets of interpolation points
for very general sets of interpolation points  in the xyplane.
in the xyplane.
In the  -plane a spline is of the form
-plane a spline is of the form
 (19)
(19)
where  is the Euclidean distance between the field point
is the Euclidean distance between the field point  and the load point
and the load point . and
. and  is a polynomial of degree
is a polynomial of degree . For
. For  these are the thin plate splines (TPS)
these are the thin plate splines (TPS)
 and
and 
Thus, the particular solution of the temperature can be approximated as
 (20)
(20)
where

and
Consequently, the dual reciprocity representation formula can be written as follows
 (21)
(21)
in which all domain integrals have been transformed to the boundary.
The field variables  and
and  are then approximated by means of shape functions
are then approximated by means of shape functions  and nodal values
and nodal values  and
and  as follows
as follows
 (22)
(22)
where ,
,  and
and  are matrices We can also approximate the particular solutions
are matrices We can also approximate the particular solutions  and
and  on the boundary as the unknown field variables by means of nodal values
on the boundary as the unknown field variables by means of nodal values  and
and  as follows
as follows
 (23)
(23)
where  and
and  are matrices Using (22) and (23) and applying the point collocation procedure to (21), we have the following system of equations
are matrices Using (22) and (23) and applying the point collocation procedure to (21), we have the following system of equations
 (24)
(24)
Let
 (25)
(25)
Using (25) into (24) we have
 (26)
(26)
where the matrices  and
and  contain the particular solutions.
contain the particular solutions.
The generalized source term in (18) is approximated with a series of given source source terms  and unknown coefficients
and unknown coefficients  as follows
as follows
 (27)
(27)
Then, by applying a point collocation procedure to equation (27) we obtain
 (28)
(28)
which can be substituted into (27) producing
 (29)
(29)
where
 (30)
(30)
In order to solve the system (29), the nodal vectors are subdivided into known and unknown parts denoted by the superscripts  and
and 
 (31)
(31)
The following matrix equation is obtained from (29):
 (32)
(32)
The unknown fluxes  are obtained from the first row of matrix equation (32) are expressed as follows
are obtained from the first row of matrix equation (32) are expressed as follows
 (33)
(33)
Making use of (33) we can write the second row of matrix equation (32) as follows
 (34)
(34)
where





At a time step , equation (34) can be written in the following form
, equation (34) can be written in the following form
 (35)
(35)
where

We take the finite difference grids with  as the time step, and use the subscripts
as the time step, and use the subscripts  to denote the
to denote the  discrete time. A mesh is defined by
discrete time. A mesh is defined by
 ,
,  being the time step Using finite difference, we can approximate the temperature as follows
being the time step Using finite difference, we can approximate the temperature as follows
 (36)
(36)
Hence, we can write
 (37)
(37)
where

Thus, with  determined, the remaining task is to solve (14) subject to (6), (7) and (8).
determined, the remaining task is to solve (14) subject to (6), (7) and (8).
3.2. Displacement Field
Making use of (2)-(4), (12) and (13), we can write (14) as follows
 (38)
(38)
where


When the temperature field is known, the displacement field is obtained by solving (38), where the inertia term , the magnetic term
, the magnetic term , the viscosity term
, the viscosity term , the temperature gradient
, the temperature gradient  and the initial stress term
and the initial stress term  are treated as the body forces.
are treated as the body forces.
On the basis of the method of weighted residuals, the differential equation (38) can be transformed to the integral equation in the following form
 (39)
(39)
where  is a weighting function and
is a weighting function and  is the approximate solution.
is the approximate solution.
Integration by parts twice using the divergence theorem of Gauss as in Fahmy [11] yields
 (40)
(40)
where the traction vectors on the boundary are
 (41)
(41)
Using the symmetric elasticity tensor  Therefore, it follows that
Therefore, it follows that
 (42)
(42)
 (43)
(43)
Using equations (41), (42) and (43), the equation (40) can now be rewritten in the form
 (44)
(44)
We define the fundamental solution  by the relation
by the relation
 . (45)
. (45)
If we replace the weighting functions  in (44) by
in (44) by , then we have
, then we have
 (46)
(46)
From (38), (45) and (46), the representation formula may be written as
 (47)
(47)
Let
 (48)
(48)
Using the TPS as in Cho, et al. [18], we can write the particular solution of the displacement as follows
 (49)
(49)
where  is the Bessel function of the third kind of order zero and
is the Bessel function of the third kind of order zero and , which is known as Euler’s constant.
, which is known as Euler’s constant.
Hence, the traction particular solution  and source function
and source function  can be obtained by evaluating
can be obtained by evaluating
 (50)
(50)
On the basis of these considerations, the integral domain can be approximated as
 (51)
(51)
The use of (51) together with the dual reciprocity
 (52)
(52)
Gives rise to
 (53)
(53)
From (45), one may derive
 (54)
(54)
Making use of (47), (53) and (54) we can write the dual reciprocity representation formula as follows
 (55)
(55)
The representation formula (55) is only valid if  lies inside the domain
lies inside the domain . To obtain an expression that contains only boundary variables, the load point
. To obtain an expression that contains only boundary variables, the load point  has to be moved to the boundary. Therefore, the boundary is deformed by a small circular region with radius
has to be moved to the boundary. Therefore, the boundary is deformed by a small circular region with radius  around the load point
around the load point  as shown in Figure 1.
as shown in Figure 1.
According to references [11], [19] and [20], the dual reciprocity boundary integral equation can be expressed as
 (56)
(56)
where ∮ is the Cauchy principal value symbol.
The unknown field variables and the particular solutions are respectively approximated by means of nodal values  and shape functions
and shape functions 
 (57)
(57)
 (58)
(58)
where  and
and  are matrices.
are matrices.
On the basis of these approximations, and using the point collocation procedure, the dual reciprocity boundary integral equation (56) results to the following system of equations
 (59)
(59)

Figure 1. Geometry of the deformed boundary.
By letting
 (60)
(60)
We can write (59) as follows
 (61)
(61)
The coefficient vector  can be calculated from (48) using the point collocation procedure, which yields
can be calculated from (48) using the point collocation procedure, which yields
 (62)
(62)
Thus, (61) yields the system
 (63)
(63)
where
 (64)
(64)
By subdividing the nodal vectors into known and unknown parts as follows
 (65)
(65)
where the superscripts  and
and  denote, respectively, the known and unknown parts Hence we can write the system (63) in the following form
denote, respectively, the known and unknown parts Hence we can write the system (63) in the following form
 (66)
(66)
The unknown fluxes  can be obtained from the first row of (66) as follows
can be obtained from the first row of (66) as follows
 (67)
(67)
With the aid of (67) into the second row of (66) we obtain
 (68)
(68)
where






We can write (68) at time step 
 (69)
(69)
where

Now, we consider an implicit backward finite difference scheme for solving the system of ordinary differential equation (69), the so-called Houbolt’s algorithm is applied to reduce (69) to an algebraic system. To do this, the velocities  and accelerations
and accelerations  at time step
at time step  are approximated as follows
are approximated as follows
 (70)
(70)
 (71)
(71)
Substituting (94) and (95) into (93) we have
 (72)
(72)
where

We apply successive over-relaxation (SOR) as described in Golub and Van Loan [21] to solve the system (96). For every time step  the values of
the values of  are established. Once these values have been obtained, the unknown
are established. Once these values have been obtained, the unknown  and
and  can be obtained from (70) and (71), respectively. For the case in which
can be obtained from (70) and (71), respectively. For the case in which , the procedure described in Bathe [22] is used together with the initial conditions to derive
, the procedure described in Bathe [22] is used together with the initial conditions to derive  and
and . Lastly, we compute the traction vector
. Lastly, we compute the traction vector  using (67).
using (67).
4. Numerical Results and Discussion
The present work should be applicable to any magneto-thermo-viscoelastic deformation problem. The application is for purpose of illustration; we do not intend to validate the results in a quantitative way because we have no experimental data at hand; this may be justified because our objective is to introduce a viable numerical technique for studying a model rather than to study any physical behaviors of it (see, for example, Ahmed [23], Kanaun [24] and Monsia [25]). Such a technique was discussed in Abd-Alla et al. [26-28] who solved the special case from this study in the absence of viscosity and inertia. To achieve better efficiency than the technique described in Abd-Alla, et al. [26-28], we use thin plate splines into a code, which is proposed in the current study. We extend the study of Abd-Alla, et al. [26-28], to include the viscosity interactions and the inertia term. Thus, it is perhaps not surprising that the numerical values obtained here are in very good agreement with those obtained by Abd-Alla et al. [26-28].
The example considered by Sladek, et al. [29] may be considered as a special case of the current general problem in the context of the uncoupled thermoelasticity theory. Also, there are alot of practical applications may be deduced as special cases from this general study and may be implemented in commercial finite element method (FEM) software packages FlexPDE 6.
In the special case under consideration, the results of the displacement  are plotted in Figure 8 to show the validity of the proposed method. These results obtained with the DRBEM have been compared graphically with those obtained using the Meshless Local Petrov-Galerkin (MLPG) method of Sladek, et al. [29] and also the results obtained from the FlexPDE 6 are shown graphically in the same figures to confirm the validity of the proposed method. It can be seen from this figure that the DRBEM results are in excellent agreement with the results obtained by MLPG and finite element methods, thus confirming the accuracy of the DRBEM.With a view to illustrate the numerical implementation presented earlier, we consider a monoclinic graphite-epoxy as an anisotropic magneto-thermo-visco-elastic solid with the following physical constants:
are plotted in Figure 8 to show the validity of the proposed method. These results obtained with the DRBEM have been compared graphically with those obtained using the Meshless Local Petrov-Galerkin (MLPG) method of Sladek, et al. [29] and also the results obtained from the FlexPDE 6 are shown graphically in the same figures to confirm the validity of the proposed method. It can be seen from this figure that the DRBEM results are in excellent agreement with the results obtained by MLPG and finite element methods, thus confirming the accuracy of the DRBEM.With a view to illustrate the numerical implementation presented earlier, we consider a monoclinic graphite-epoxy as an anisotropic magneto-thermo-visco-elastic solid with the following physical constants:
Elasticity tensor

Mechanical temperature coefficient

Tensor of thermal conductivity

Mass density  and heat capacity
and heat capacity ,
,  Oersted,
Oersted,  Gauss/Oersted,
Gauss/Oersted,  ,
,  ,
, . The boundary
. The boundary  is
is , the boundary
, the boundary  is
is , the boundary
, the boundary  is
is , while
, while  is
is . The numerical values of the temperature and displacement are obtained by discretizing the boundary into 120 elements
. The numerical values of the temperature and displacement are obtained by discretizing the boundary into 120 elements  and choosing 60 well spaced out collocation points
and choosing 60 well spaced out collocation points  in the interior of the solution domain.
in the interior of the solution domain.
The initial and boundary conditions considered in the calculations are





In order to evaluate the influence of the inhomogeneity on the displacements and thermal stresses in an anisotropic viscoelastic solid under initial stress, the inhomogeneity parameter is taken to be  and for the homogeneous solid, we assume that
and for the homogeneous solid, we assume that .
.
A comparison of the results is presented graphically for the following different cases: the solid line denoted by “A” represents the solution for homogeneous solid in the absence of initial stress , the dashed line denoted by “C” represents the solution for non-homogeneous solid in the absence of initial stress, the dotted line denoted by “B” represents the solution for homogeneous solid in the presence of initial stress
, the dashed line denoted by “C” represents the solution for non-homogeneous solid in the absence of initial stress, the dotted line denoted by “B” represents the solution for homogeneous solid in the presence of initial stress  and the dashed-dotted line denoted by “D” represents the solution for non-homogeneous solid in the presence of initial stress.
and the dashed-dotted line denoted by “D” represents the solution for non-homogeneous solid in the presence of initial stress.
Figure 2 shows the variation of the temperature T along  -axis at various values of the time
-axis at various values of the time . It is noticed that the temperature increases with the increase of
. It is noticed that the temperature increases with the increase of  and
and .
.
Figures 3-7 show the influence of the initial stress and inhomogeneity of the material constants on the displacements  and
and  and thermal stresses
and thermal stresses ,
,  and
and . Also, they show the difference among the four cases “A”, “C”, “B” and “D”.
. Also, they show the difference among the four cases “A”, “C”, “B” and “D”.
Figure 3 shows that the displacement  increases and then decreases with the increase of
increases and then decreases with the increase of . It is noticed that the maximum value happens in the homogeneous solid in the presence of initial stress.
. It is noticed that the maximum value happens in the homogeneous solid in the presence of initial stress.
Figure 4 shows that the displacement  decreases and then increases for all cases. It is clear from this figure that the homogeneous and non-homogeneous curves
decreases and then increases for all cases. It is clear from this figure that the homogeneous and non-homogeneous curves
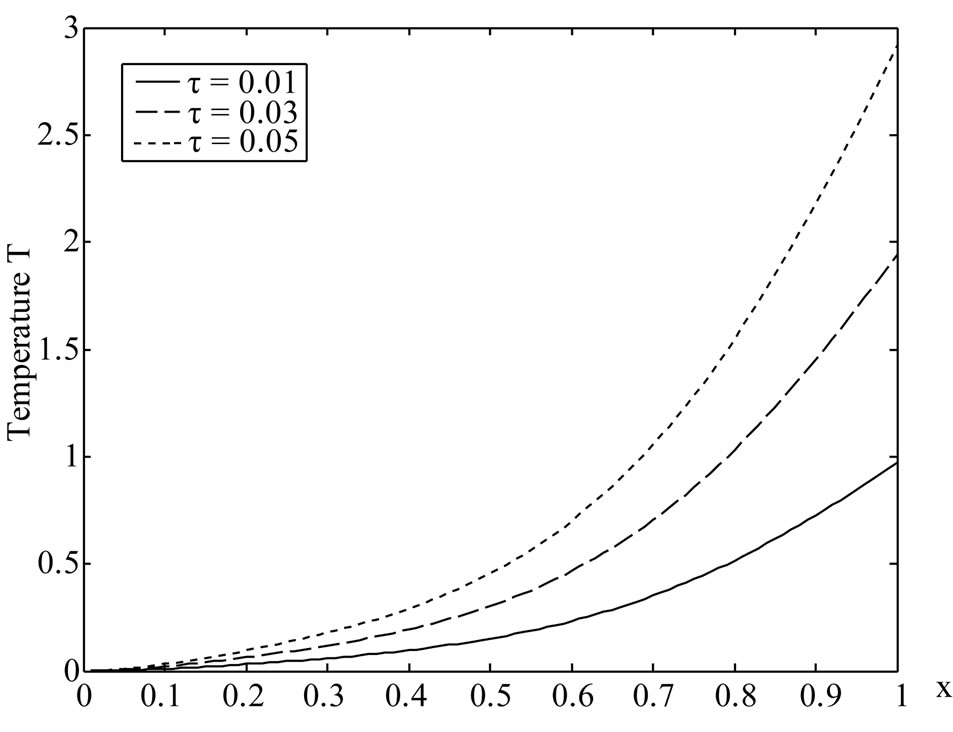
Figure 2. Variation of the temperature T with x coordinate (y = 1).

Figure 3. Variation of the displacement u1 with x coordinate.

Figure 4. Variation of the displacement u2 with x coordinate.
diverge in the presence of initial stress. We can see also from this figure that the negative maximum value happens in the non-homogeneous solid in the presence of initial stress.
Figure 5 shows that the thermal stress  increases with increasing
increases with increasing  for all cases. It is apparent from this figure that the increasing rate is more pronounced in non-homogeneous solid in the presence of initial stress.
for all cases. It is apparent from this figure that the increasing rate is more pronounced in non-homogeneous solid in the presence of initial stress.
Figure 6 shows that the thermal stress  increases with the increase of
increases with the increase of  for all cases. It will be observed from this figure that the increasing rate is more pronounced in the presence of initial stress.
for all cases. It will be observed from this figure that the increasing rate is more pronounced in the presence of initial stress.
Figure 7 shows that the thermal stress  decreases with the increase of
decreases with the increase of  for the non-homogeneous solid, but for homogeneous solid it increases with the increase of
for the non-homogeneous solid, but for homogeneous solid it increases with the increase of . It is clear from this figure that the increasing rate is more pronounced in the presence of initial stress.
. It is clear from this figure that the increasing rate is more pronounced in the presence of initial stress.
It is clear from all of these figures that the curves of the displacements  and
and  and thermal stresses
and thermal stresses ,
,

Figure 5. Variation of the thermal σ11 with x coordinate.

Figure 6. Variation of the thermal σ12 with x coordinate.

Figure 7. Variation of the thermal σ22 with x coordinate.

Figure 8. Variation of the displacement u1 with time τ for the three methods: DRBEM, MLPG and FEM.
 and
and  are closer in the absence of initial stress than in the presence of initial stress. We may also observe from these figures that the initial stress has an important effect on the magneto-thermo-visco-elastic stresses along
are closer in the absence of initial stress than in the presence of initial stress. We may also observe from these figures that the initial stress has an important effect on the magneto-thermo-visco-elastic stresses along  -axis through the material constants, thermal constants, magnetic constants and viscosity factor, which are essential parameters to be considered in the design of various devices. Furthermore, while there is no limitation in the solution procedure, all boundary and initial conditions are strongly satisfied.
-axis through the material constants, thermal constants, magnetic constants and viscosity factor, which are essential parameters to be considered in the design of various devices. Furthermore, while there is no limitation in the solution procedure, all boundary and initial conditions are strongly satisfied.
This phenomenon gives clear evidence of a magnetothermostress-focusing effect in a non-homogeneous anisotropic initially stressed viscoelastic solid. From this knowledge of the variation of magneto-thermo-viscoelastic stresses along  -axis in a non-homogeneous anisotropic initially stressed viscoelastic solid placed in a constant primary magnetic field, we can design various viscoelastic solids under magnetothermal load to meet specific engineering requirements and utilize it in measurement techniques of thermoviscoelasticity.
-axis in a non-homogeneous anisotropic initially stressed viscoelastic solid placed in a constant primary magnetic field, we can design various viscoelastic solids under magnetothermal load to meet specific engineering requirements and utilize it in measurement techniques of thermoviscoelasticity.
5. Conclusions
The purpose of this paper is to investigate the transient magneto-thermo-visco-elastic stresses in a non-homogeneous anisotropic body. A development of the dual reciprocity boundary element method for solving the system of fundamental equations is presented. In the case of plane deformation, a numerical scheme for the implementation of the method is presented and the numerical computations are carried out for the temperature, displacement components and thermal stress components. The validity of DRBEM is examined by considering a magneto-thermo-visco-elastic solid occupies a rectangular region and excellent agreement is obtained with existent results. The results obtained are presented graphically to show the effects of inhomogeneity and initial stress on the displacement components and thermal stress components.