1. Introduction
Nowadays, Wheeled Mobile Robots (WMRs) have found many applications in industry, transportation, and inspection fields. Therefore, trajectory tracking control of nonholonomic WMRs has been an important problem in state of the art research works of recent literatures.
The assumption of pure rolling and not slipping motion leads to a non-integrable constraint in the kinematics of nonholonomic mobile robots. Since a non-holonomic system cannot be stabilized via smooth state feedback methods, the conventional linear control theories may not be applied to this class of systems [1]. Another important issue in real WMRs is arisen from parameter uncertainties, measurement noises and any other probable anomalies. In order to come over these problems and make the WMR converge to its reference trajectory, remarkable attempts have been done by researchers. For example, different controllers of time-invariant, time-varying and hybrid types based on Lyapunov control theories have been proposed by Kolmanovsky and McClamroch [2]. The global trajectory tracking problem has been discussed based on backstepping techniques [3]. In a research work done by Sun, the kinematic model of a mobile robot has been transformed into a linear time invariant system by state and input transformation, then, the pole-assignment method has been applied to design the controller [4]. Keighobadi, Menhaj and Kabganian have designed a mixed feedback-linearization and fuzzy controller for perfect trajectory tracking control of the WMR [5], see also [6-8] for more robust and intelligent applications.
As a robust control approach, sliding mode controller (SMC) is recently receiving increasing attentions. The advantages of using SMCs are fast response, good transient performance and significant robustness against perturbations and noises. This method is also respectively simple and doesn’t have complexities. The trajectory tracking of a nonholonomic WMR based on an improved sliding mode control method has been done in which the switch function of the variable structure control is designed based on the back stepping technique [9]. An artificial neural network based sliding mode control for nonholonomic WMRs has been applied to reduce the effects of model uncertainty [10]. Shin, Kim and Koh have used a variable structure control law that makes the WMR converge to reference trajectories with bounded error of position and velocity components [11]. In trajectory tracking field, the controllers are designed commonly based on the kinematic model of the WMRs. Therefore, the control inputs of mobile robot are often considered its linear and angular velocities. In the proposed DSMC of this paper, the dynamical model of the WMR includes the total mass and inertia moment of WMR. Thus, the designed controller deals with the dynamical effects which make it more applicable in real world. In the dynamical control of a WMR, the imposed torques upon the driving wheels are considered the control inputs. Using the dynamic model of the WMR developed in polar coordinate, Yang and Kim have proposed a sliding mode control law for solving the trajectory tracking problem of the WMR in the presence of disturbances [12]. Hu and Huo have designed a robust controller based on a dynamic model in which the actuator dynamics is included [13].
In this paper, we propose a new control law that stabilizes the WMR around the given reference trajectory. The developed dynamic model includes inertia moment of driving wheels, the total mass and inertia moment of WMR which has a centroid offset from the connection center of its driving wheels. Following linearizing the error dynamics of WMR through the computed torque method, a sliding mode control law is applied for stabilizing the robot around its reference trajectory even in the presence of exogenous disturbances/noises and modeling uncertainties.
The recent controllers in the literatures have been limited for implementations in special kind WMRs; for instance, the heading direction of the WMR should be tangent to the circular trajectory around the origin of the global coordinate system. Furthermore, both the reference and the real trajectory should not cross through the origin after starting over the initial position; and the initial position of reference trajectory is always set to be the origin of coordinates; or the angular velocity of WMR is assumed to be nonzero during trajectory tracking. However, in this paper, due to design of the WMR control system in a global Cartesian coordinate frame, the proposed DSMC doesn’t rely on the aforementioned limiting assumptions. Therefore, as it will be shown in the simulation results, the proposed control law results in smooth tracking and considerable robustness against perturbations and measurement noises. The rest of the paper is organized as follows:
In Section 2 using dynamics of nonholonomic mechanical systems and the kinematic model of the WMR, a new dynamic model of WMR is derived. Section 3 is devoted to present the design process of the proposed DSMC which stabilizes the WMR around its reference trajectory in the presence of perturbations and measurement noises. In Section 4, to show the performance of the proposed controller, tracking control of WMR on a circular path is simulated.
2. Dynamic Modeling of Nonholonomic WMR
2.1. Dynamics of Nonholonomic Mechanical Systems
As represented by Hu and Huo, many nonholonomic mechanical systems can be described by the following dynamic equations [13]:
 (1)
(1)
And the nonholonomic kinematic constraints are as:
 (2)
(2)
where,  and
and  are respectively the generalized configuration and the control input vectors, respectively;
are respectively the generalized configuration and the control input vectors, respectively;  is the constraint force vector;
is the constraint force vector;  is a positive definite matrix;
is a positive definite matrix;  is the term which may include centripetal and Coriolis forces;
is the term which may include centripetal and Coriolis forces;  is a
is a  full rank transformation input matrix;
full rank transformation input matrix;  is a
is a  full rank matrix associated with the constraints. Let
full rank matrix associated with the constraints. Let  i =
i =  is a set of smooth and linearly independent functions such that:
is a set of smooth and linearly independent functions such that:
 (3)
(3)
Considering  as the distribution spanned by the vectors
as the distribution spanned by the vectors , then from (2) it follows that
, then from (2) it follows that , that is, there exists an
, that is, there exists an  dimensional pseudo-velocity vector,
dimensional pseudo-velocity vector,  such that:
such that:
 (4)
(4)
where, .
.
Differentiating (4) results in:
 (5)
(5)
Substituting (5) into (1) and then pre-multiplying by  gives:
gives:
 (6)
(6)
Through pre-multiplying (6) by , the nonholonomic mechanical system (1) and (2) reduces to:
, the nonholonomic mechanical system (1) and (2) reduces to:
 (7)
(7)
where,  is a
is a  matrix;
matrix;  is a
is a  matrix and
matrix and . Now, the proposed system (7) is used to dynamic modeling of the WMR.
. Now, the proposed system (7) is used to dynamic modeling of the WMR.
2.2. Dynamical Model
For the purpose of dynamical modeling,  and
and  should be determined. The driving wheels of the considered WMR rotate by independent actuator motors. According to the schematic model in Figure 1, indeed the robot is a plate body which is carried by two driving wheels and the other two caster wheels that prevents the robot from tipping over as it moves on a plane. In this paper, due to very little inertial parameters, the motion of caster wheels is not included in the dynamic modeling of the WMR. In Figure 1,
should be determined. The driving wheels of the considered WMR rotate by independent actuator motors. According to the schematic model in Figure 1, indeed the robot is a plate body which is carried by two driving wheels and the other two caster wheels that prevents the robot from tipping over as it moves on a plane. In this paper, due to very little inertial parameters, the motion of caster wheels is not included in the dynamic modeling of the WMR. In Figure 1,  is the distance between the centroid, C of the robot and the connection center of the driving wheels. The WMR’s centroid in the global coordinate system with axes X-Y is indicated as
is the distance between the centroid, C of the robot and the connection center of the driving wheels. The WMR’s centroid in the global coordinate system with axes X-Y is indicated as , and x-y stand for a local coordinate system which its origin coincides to C and the axes are fixed to the robot body as Figure 1 shows.
, and x-y stand for a local coordinate system which its origin coincides to C and the axes are fixed to the robot body as Figure 1 shows.
The symbol,  is the angle between x-axis and Xaxis representing the heading angle.
is the angle between x-axis and Xaxis representing the heading angle.  denotes the velocity of the robot along x-axis and
denotes the velocity of the robot along x-axis and  denotes the angular velocity.
denotes the angular velocity.  and
and  are the angular velocities of the right and left driving wheels, respectively.
are the angular velocities of the right and left driving wheels, respectively.  and
and  denote the length of driving axel and the radius of every driving wheel, respectively.
denote the length of driving axel and the radius of every driving wheel, respectively.
The position vector of the WMR,  is defined as:
is defined as:
 (8)
(8)
According to the recent research works [5] and [8], considering the WMR kinematics, the holonomic and nonholonomic constraints are given as:
 (9)
(9)
 (10)
(10)
 (11)
(11)
The following rotation matrix transforming the veloc-
ity components between the global and local coordinate systems, play an important role in developing the kinematics of WMR:
 (12)
(12)
Obtaining,  in terms of
in terms of  from (12) and using (9) and (10), the nonholonomic constraint of the WMR is represented as:
from (12) and using (9) and (10), the nonholonomic constraint of the WMR is represented as:
 (13)
(13)
According to (8) and (13),  and
and ; and therefore, z is a two dimensional vector. Considering
; and therefore, z is a two dimensional vector. Considering  and
and  as internal state variables gives:
as internal state variables gives:
 (14)
(14)
Therefore, (4) can be constructed in the following form which is known the kinematic model of the WMR.
 (15)
(15)
Now the following Lagrangian is considered for the WMR dynamic modeling [5,8].
 (16)
(16)
where,  is the total mass of the robot.
is the total mass of the robot.  is the moment of inertia around the axis crossing C and perpendicular to X-Y plane. The moment of inertia of driving wheels is shown by
is the moment of inertia around the axis crossing C and perpendicular to X-Y plane. The moment of inertia of driving wheels is shown by . By applying the Lagrangian approach, an equation like (1) is achieved, therefore, by comparing it with (1),
. By applying the Lagrangian approach, an equation like (1) is achieved, therefore, by comparing it with (1),  and
and  can be determined. Then, using (6) and (7),
can be determined. Then, using (6) and (7),  and
and  can be easily computed. Finally, the dynamical model of the WMR is obtained as:
can be easily computed. Finally, the dynamical model of the WMR is obtained as:
 (17)
(17)
 is the input torque vector in which
is the input torque vector in which  and
and  are the produced torques by the right and left driving wheels, respectively.
are the produced torques by the right and left driving wheels, respectively.
3.3. DSMC
3.1. Control System
The purpose of the DSMC is computation of control inputs  which make the WMR to track a feasible trajectory with bounded errors. The three dimensional posture variables of the reference trajectory are considered as,
which make the WMR to track a feasible trajectory with bounded errors. The three dimensional posture variables of the reference trajectory are considered as, ; the reference velocity and the acceleration vectors are derived by
; the reference velocity and the acceleration vectors are derived by  as,
as,  and,
and,  respectively. The real world robotic systems have inherent system perturbations such as parameter uncertainties and external disturbances. Therefore, dynamical equations of the WMR are represented as:
respectively. The real world robotic systems have inherent system perturbations such as parameter uncertainties and external disturbances. Therefore, dynamical equations of the WMR are represented as:
 (18)
(18)
where, the perturbation vector,  considers the uncertainty and disturbance effects in the dynamical model. It is assumed that
considers the uncertainty and disturbance effects in the dynamical model. It is assumed that  is energy bounded and satisfies the uncertainty matching condition as:
is energy bounded and satisfies the uncertainty matching condition as:

 and
and  are the upper bounds of the perturbations.
are the upper bounds of the perturbations.
3.2. Controller Design
First, the position and the orientation errors are defined as:

To stabilize the tracking errors, the sliding surfaces are defined as:
 (19)
(19)
 (20)
(20)
where  and
and  are positive fixed parameters. If
are positive fixed parameters. If  is asymptotically stable, then
is asymptotically stable, then  and
and  will converge to zero asymptotically. Because if
will converge to zero asymptotically. Because if  then
then . Therefore, if
. Therefore, if  then
then  and if
and if  then
then . Therefore, the equilibrium state of
. Therefore, the equilibrium state of  is asymptotically stable. Similarly, if
is asymptotically stable. Similarly, if  is asymptotically stable,
is asymptotically stable,  and
and  asymptotically converge to zero. Thus, if
asymptotically converge to zero. Thus, if  and
and  become stabilized, the convergence of the WMR to the predetermined reference trajectory is guaranteed.
become stabilized, the convergence of the WMR to the predetermined reference trajectory is guaranteed.
The control input vector is obtained through the computed-torque method as a feedback-linearization method [14]:
 (21)
(21)
where  is the control law. Applying the control input (21) into the dynamic equation of WMR (18), the feedback-linearized dynamic equation is given as:
is the control law. Applying the control input (21) into the dynamic equation of WMR (18), the feedback-linearized dynamic equation is given as:
 (22)
(22)
Hence, from (22):
 (23)
(23)
 (24)
(24)
The control actions  and
and  which stabilize the sliding surfaces
which stabilize the sliding surfaces  and
and  are proposed as:
are proposed as:

where  are greater than
are greater than , respectively; and
, respectively; and ,
,  are real positive constant values. Lyapunov’s direct method is used to prove the stability of
are real positive constant values. Lyapunov’s direct method is used to prove the stability of  and
and  by imposing
by imposing  and
and . Substituting
. Substituting  and
and  in (22) and (23), respectively, yields
in (22) and (23), respectively, yields  and
and  as:
as:
 (25)
(25)
 (26)
(26)
According to Lyapunov’s direct method, the following Lyapunov function is introduced.
 (27)
(27)
Taking the time derivative of V along the state trajectory gives:
 (28)
(28)
Replacing  and
and  from (25) and (26) in (28) results in the following negative definite,
from (25) and (26) in (28) results in the following negative definite, .
.

Therefore,  and
and  are asymptotically stable and therefore, the WMR will converge to the desired reference trajectories. It should be noted that due to using the sign term in the designed controller, the chattering phenomenon may occur when the posture state errors are negligible values. To weaken the unwanted chattering phenomenon, some continuous functions, for example a saturation term could be used to approximate the sign term.
are asymptotically stable and therefore, the WMR will converge to the desired reference trajectories. It should be noted that due to using the sign term in the designed controller, the chattering phenomenon may occur when the posture state errors are negligible values. To weaken the unwanted chattering phenomenon, some continuous functions, for example a saturation term could be used to approximate the sign term.
4. Simulation Results
To assess the effectiveness of the proposed DSMC, software simulations using MATLAB/SIMULINK are implemented. The simulations of tracking a circular trajectory are performed in which the desired position, orientation, velocities and acceleration of the WMR is monitored. Figures 2-7 show the trajectory tracking performance of the designed control system of the WMR to compensate large initial off-tracks in the absence of uncertainties and measurement noises. According to Figures 2-7, by use of the proposed DSMC, the tracking errors of posture and velocity trajectories with respect to corresponding reference values smoothly converge to zero and therefore, a perfect trajectory tracking is obtained. On the other hand, the bounded control inputs of Figure 8 show the significant performance of the proposed DSMC even under large posture off tracks.
Sliding mode control systems are known for robustness against parameter uncertainties and stochastic noises. To show this property of the proposed DSMC, Gaussian measurement noises are considered together with the measured posture variables. By the way, the simulated tracking performance of the WMR in the presence of measurement noises is shown in Figures 8-14. According to these figures, one can see that the DSMC keeps the posture and the velocity errors in a bounded small range and thus makes the WMR to track its reference trajectory

Figure 3. Position tracking error along X axis .
.

Figure 4. Position tracking error along Y axis .
.

Figure 5. Tracking error of orientation .
.

Figure 6. Tracking error of forward velocity .
.

Figure 7. Tracking error of angular velocity .
.

Figure 8. Produced torque by driving wheels.

Figure 9. Tracked path of WMR under noises.

Figure 10. Position tracking error along X under noises.

Figure 11. Position tracking error along Y under noises.

Figure 12. Tracking error of orientation,  under noises.
under noises.
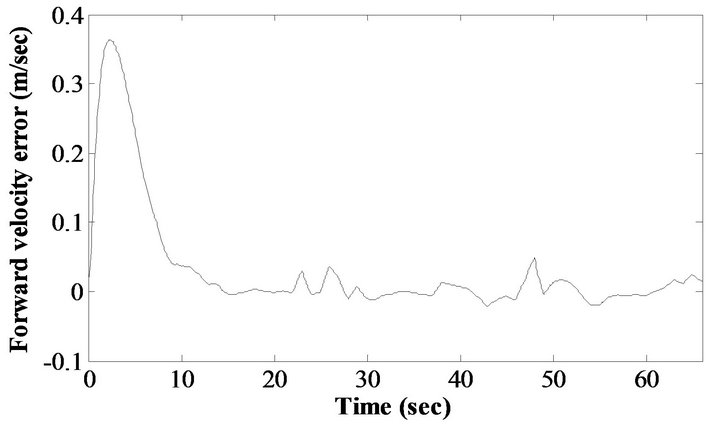
Figure 13. Tracking error of forward velocity under noises.

Figure 14. Tracking error of angular velocity,  under noises.
under noises.
perfectly. For example, as Figure 11 shows, after capturing the reference trajectory by the WMR, the tracking error along Y trajectory is bounded in the interval (−0.1, 0.1) which is negligible with respect to the large diameter of the circular trajectory . Furthermore, according to Figures 8 and 15, the bounded input torques of the DSMC even under measurement noises shows its significance for real implementations.
. Furthermore, according to Figures 8 and 15, the bounded input torques of the DSMC even under measurement noises shows its significance for real implementations.
5. Conclusion
A dynamic sliding mode controller for trajectory tracking control of a nonholonomic WMR has been proposed where the center of mass of the vehicle does not coincide to the middle point of connection center of driving wheels.

Figure 15. Produced torque by driving wheels.
The proposed controller is designed based on the developed dynamical model of the WMR in a global Cartesian coordinate system. According to simulation results, the designed DSMC keeps the WMR on the reference trajectory even in the presence of exogenous disturbances/ noises. Furthermore, in the proposed DSMC, bounded control torques lead to compensation of large off track.