Inferences under a Class of Finite Mixture Distributions Based on Generalized Order Statistics ()
1. Introduction
Let the random variable (rv) T follow a class including some known lifetime models, its cumulative distribution function (CDF) is given by
 (1)
(1)
and its probability density function (PDF) is given by
 (2)
(2)
where  is the derivative of
is the derivative of  with respect to t and
with respect to t and  is a nonnegative continuous function of t and
is a nonnegative continuous function of t and  may be a vector of parameters, such that
may be a vector of parameters, such that as
as  and
and  as
as 
The reliability function (RF) and hazard rate function (HRF) are given, respectively, by
 (3)
(3)
 (4)
(4)
where
Bayesian inferences based on finite mixture distribution have been discussed by several authors. Bayesian estimation of the mixing parameter, mean and reliability function of a mixture of two exponential lifetime distributions based on right censored samples considered by [1,2] estimated the survival and hazard functions of a finite mixture of two Gompertz components by using type I and type II censored samples, using the maximum likelihood (ML) and Bayes methods. Based on type I censored samples from a finite mixture of two truncated type I generalized logistic components, [3] computed the Bayes estimates of parameters, reliability and hazard rate functions. [4] considered estimation for the mixed exponential distribution based on record statistics. [5] considered Bayes inference under a finite mixture of two compound Gompertz components model. [6] studied some properties of the mixture of two inverse Weibull distributions and obtained the estimates of the unknown parameters via the EM Algorithm.
[7] introduced the generalized order statistics (gos’s). Ordinary order statistics, ordinary record values and sequential order statistics are, among others, special cases of gos’s. The gos’s have been considered extensively by many authors, among others, they are [8-20].
Mixtures of distributions arise frequently in life testing, reliability, biological and physical sciences. Some of the most important references that discussed different types of mixtures of distributions are a monograph by [21-23].
The PDF, CDF, RF and HRF of a finite mixture of two components of the class under study are given, respectively,
 (5)
(5)
 (6)
(6)
 (7)
(7)
 (8)
(8)
where, for , the mixing proportions
, the mixing proportions  are such that
are such that  and
and are given from (1), (2), (3) after using
are given from (1), (2), (3) after using  and
and  instead of
instead of  and
and .
.
The property of identifiability is an important consideration on estimating the parameters in a mixture of distributions. Also, testing hypothesis, classification of random variables, can be meaning fully discussed only if the class of all finite mixtures is identifiable. Idenifiability of mixtures has been discussed by several authors, including [24-26].
Our aim of this paper is the estimation of the parameters and functions of these parameters of a class of finite mixture distributions based on doubly Type II censoring gos’s using ML and Bayes methods. Illustrative example of Gompertz distribution is given and compared with the results obtained by previous researchers.
2. Maximum Likelihood Estimation
Let

be the (r - s) gos’s drawn from a mixture of two components of the class (2). Based on this doubly censored sample, the likelihood function can be written [27] as
 (9)
(9)
where 

 is the parameter space, and
is the parameter space, and
For definition and various distributional properties of gos’s, see [7, 28].
The likelihood function (9) and maximum likelihood estimates (MLE’s) can be obtained by using (1) and (5) in two cases, regarding to m value, as follows.
2.1 MLE’s When 
In this case, substituting (1), (5) in (9), the likelihood function takes the form
 (10)
(10)
Take the logarithm of (10), we have
 (11)
(11)
where ,
, 
Differentiating (11) with respect to the parameters  and
and  (involved in
(involved in ) and equating to zero gives the following likelihood equations
) and equating to zero gives the following likelihood equations
 (12)
(12)
where, for j = 1,2
 (13)
(13)
The solution of the five nonlinear likelihood Equations (12) using numerical method, yields the MLE’s  and
and .
.
2.2. MLE’s When 
The likelihood function takes the form
 (14)
(14)
So, from (14)
 (15)
(15)
Differentiating (15) with respect to the parameters  and
and  and equating to zero gives the following likelihood equations
and equating to zero gives the following likelihood equations
 (16)
(16)
where
 (17)
(17)
The solution of the five nonlinear likelihood Equations (16) using numerical method, yields the MLE’s  and
and .
.
3. Bayes Estimation
In this section, Bayesian estimation for the parameters of a class of finite mixture distributions is considered under squared error and Linex (Linear-Exponential) loss functions.
We shall use the conjugate prior density, that was suggested by [29], in the following form
 (18)
(18)
where  is the hyperparameter space.
is the hyperparameter space.
3.1. Bayes Estimates When 
It follows, from (10) and (18), that the posterior density function is given by
 (19)
(19)
where
 (20)
(20)
The Bayes estimator of a function, say , under squared error and Linex loss functions is given, respectively, by
, under squared error and Linex loss functions is given, respectively, by
 (21)
(21)
 (22)
(22)
where the integral is taken over the five dimensional space and .
.
To compute the integral, we can use the Monte Carlo Integration (MCI) method in the form
 (23)
(23)
 (24)
(24)
where  is generated from the PDF
is generated from the PDF , for more details see [30].
, for more details see [30].
Under squared error and Linex loss functions, we can obtain the Bayes estimator of the parameter p, by generating

from the prior (18) and setting  in (23) and (24). The Bayes estimates of
in (23) and (24). The Bayes estimates of  and
and  can be similarly computed.
can be similarly computed.
3.2. Bayes Estimates When 
The posterior density function can be obtained from (14) and (18), as
 (25)
(25)
where
 (26)
(26)
Under squared error and Linex loss functions, we can obtain the Bayes estimator of the parameter p, by generating

from the prior (18) and setting  in (23) and (24). The Bayes estimates of
in (23) and (24). The Bayes estimates of  and
and  can be similarly computed.
can be similarly computed.
4. Example
4.1. Gompertz Components
4.1.1. Maximum Likelihood Estimation
Suppose that, for  and
and 
so
 .
.
In this case, the  subpopulation is Gompertz distribution with parameter
subpopulation is Gompertz distribution with parameter 
For  by substituting
by substituting  and
and  in (12), we have the following nonlinear equations
in (12), we have the following nonlinear equations
 (27)
(27)
where, for 
 (28)
(28)
 and
and  are the solution of the above nonlinear equations.
are the solution of the above nonlinear equations.
Also, for  substituting
substituting  and
and  in (13), (16) and (17), we have the following nonlinear equations:
in (13), (16) and (17), we have the following nonlinear equations:
 (29)
(29)
 and
and  are the solution of the above nonlinear equations.
are the solution of the above nonlinear equations.
wang#title3_4:spSpecial cases
wang#title3_4:sp1) Upper order statistics
If we put  and
and  in (10),
in (10),
the likelihood function takes the form
 (30)
(30)
Substituting  and
and  in (27), we have the following nonlinear equations
in (27), we have the following nonlinear equations
 (31)
(31)
where .
.
The solution of the nonlinear likelihood equations (31) gives the MLE’s  and
and .
.
wang#title3_4:sp2) Upper record values
If we put  in (14),
in (14),  the likelihood function takes the form
the likelihood function takes the form
 (32)
(32)
Substituting  in (29), we have the following nonlinear equations
in (29), we have the following nonlinear equations
 (33)
(33)
The solution of the nonlinear likelihood Equations (33) gives the MLE’s  and
and .
.
4.1.2. Bayes Estimation
Let  and
and  are independent random variables such that
are independent random variables such that  and for
and for ,
,  to follow a left truncated exponential density with parameter
to follow a left truncated exponential density with parameter 
 , as used by [2]. A joint prior density function is then given by
, as used by [2]. A joint prior density function is then given by
 (34)
(34)
where

and 
For  the posterior density function
the posterior density function  then takes the form
then takes the form
 (35)
(35)
For m = −1 the posterior density function then takes the form
then takes the form
 (36)
(36)
Under squared error and Linex loss functions, we can obtain the Bayes estimator of the parameter  by generating
by generating  from the prior (34) and setting
from the prior (34) and setting  in (23) and (24). The Bayes estimates of
in (23) and (24). The Bayes estimates of  and
and  can be similarly computed.
can be similarly computed.
wang#title3_4:spSpecial cases
wang#title3_4:sp1) Upper order statistics
If we put  and
and  in (35),
in (35),  the posterior density function takes the form
the posterior density function takes the form
 (37)
(37)
wang#title3_4:sp2) Upper record values
If we put  in (36),
in (36),  the posterior density function takes the form
the posterior density function takes the form
 (38)
(38)
Under squared error and Linex loss functions, we can obtain the Bayes estimator of the parameter  by generating
by generating  from the prior (34) and setting
from the prior (34) and setting  in (23) and (24). The Bayes estimates of
in (23) and (24). The Bayes estimates of  and
and  can be similarly computed.
can be similarly computed.
5. Simulation Study
A comparison between ML and Bayes estimators, under either a squared error or a Linex loss functions, is made using a Monte Carlo simulation study in the two cases upper order statistics and upper record values according to the following steps:
1) For a given values of the prior parameters  generate a random value
generate a random value  from the
from the  distribution.
distribution.
2) For a given values of the prior parameters  for
for  generate a random value
generate a random value  from the
from the  distribution.
distribution.
3) Using the generated values of  and
and  we generate a random sample of size
we generate a random sample of size  from a mixture of two
from a mixture of two  components,
components,  as follows:
as follows:
• generate two observations  from
from 
• if  then
then
otherwise
• 
• repeat above steps  times to get a sample of size
times to get a sample of size .
.
4) The sample obtained in Step 3 is ordered.
5) The MLE’s of the parameters  and
and  are obtained by solving the nonlinear Equations (31), by using Mathematica 6.
are obtained by solving the nonlinear Equations (31), by using Mathematica 6.
6) Using the generated values of  and
and  we generate upper record values of size
we generate upper record values of size  from a mixture of two
from a mixture of two  components.
components.
7) The MLE’s of the parameters  and
and  are obtained by solving the nonlinear Equations (33), by using Mathematica 6.
are obtained by solving the nonlinear Equations (33), by using Mathematica 6.
8) The Bayes estimates under squared error and Linex loss functions (BES, BEL), of  and
and  are computed, by using MCI forms (23) and (24), respectively.
are computed, by using MCI forms (23) and (24), respectively.
9) The squared deviations  are computed for different samples and censoring sizes, where
are computed for different samples and censoring sizes, where  stands for the parameter and
stands for the parameter and  its estimate (ML or Bayes).
its estimate (ML or Bayes).
10) The above Steps (3)-(9) are repeated 1000 times. The averages and the estimated risks (ER) are computed over the 1000 repetitions by averaging the estimates and the squared deviations, respectively.
The computational (our) results were computed by using Mathematica 6.0. In all above cases the prior parameters chosen as
 , which yield the generated values of
, which yield the generated values of 
 and
and  (as the true values). The true values of
(as the true values). The true values of  and
and  when
when , are computed to be
, are computed to be  and
and 
 The value of the shape parameter
The value of the shape parameter  of the Linex loss function is
of the Linex loss function is . The averages and the estimated risks (ER) are displayed in Tables 1-4. Figures 1 and 2 represent the estimated risks of the estimates in the case of upper order statistics. Figures 3 and 4 represent the estimated risks of the estimates
. The averages and the estimated risks (ER) are displayed in Tables 1-4. Figures 1 and 2 represent the estimated risks of the estimates in the case of upper order statistics. Figures 3 and 4 represent the estimated risks of the estimates
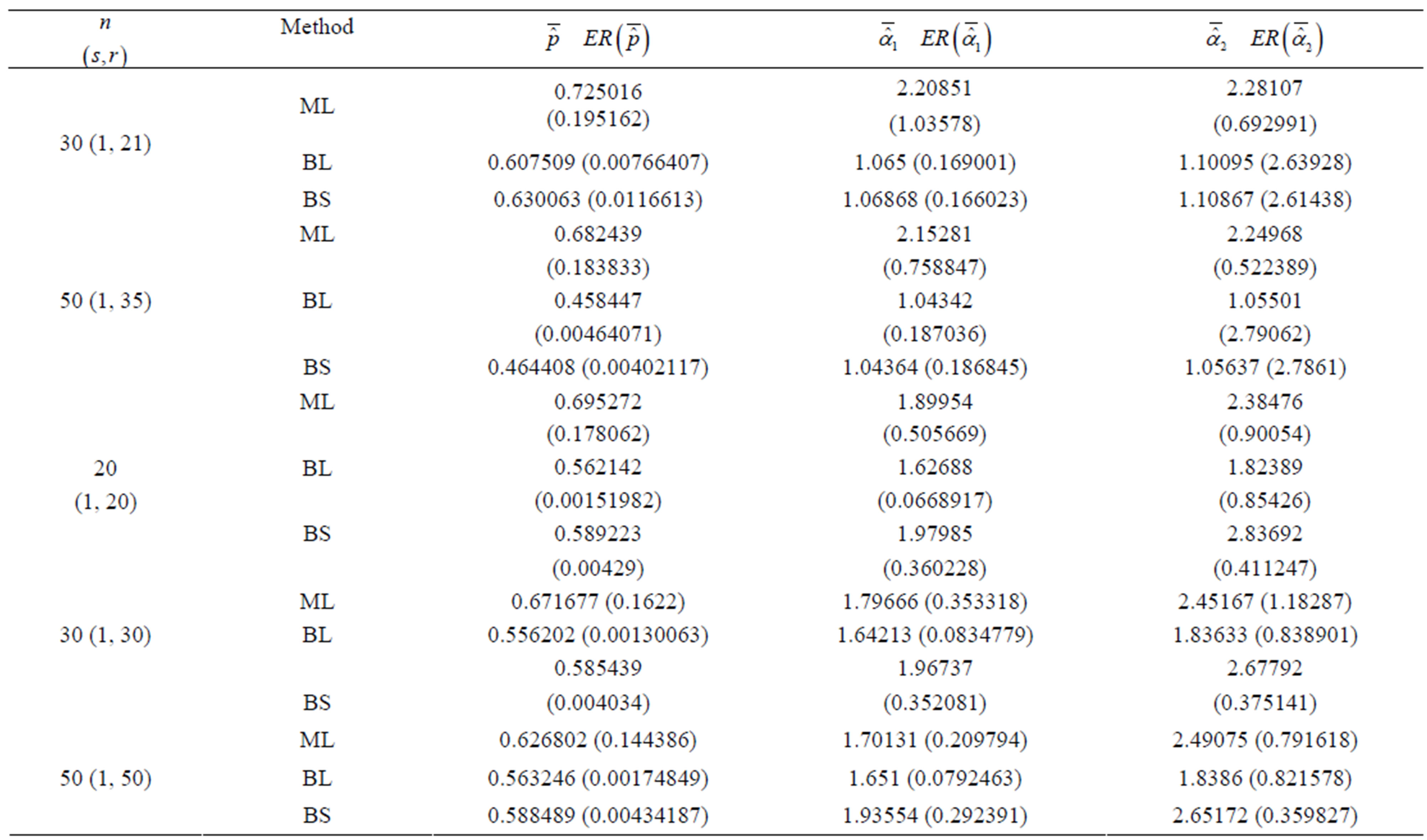
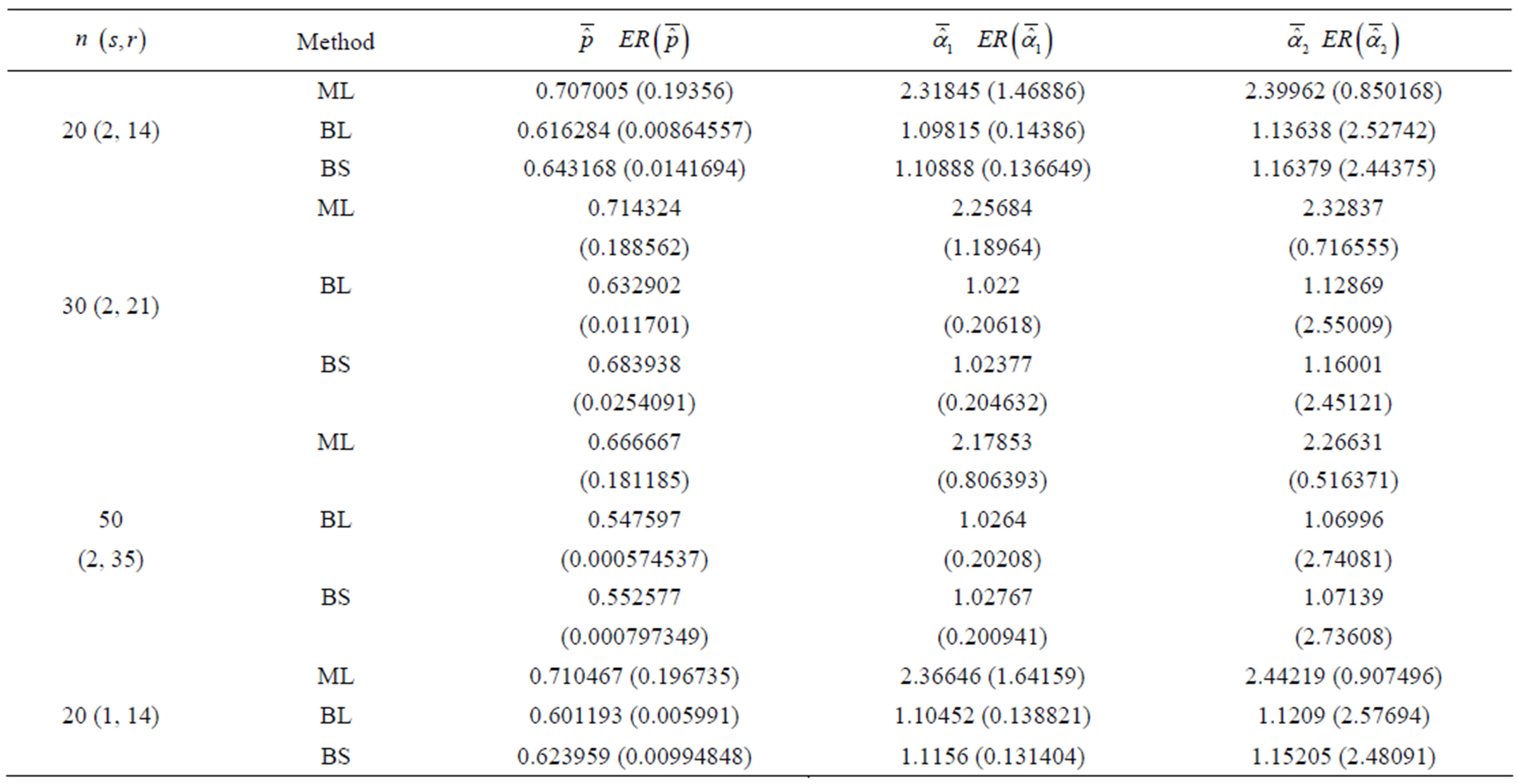
Table 1. (Upper order statistics) Averages and Estimated Risks (ER) of the estimates of  for different samples and censoring sizes.
for different samples and censoring sizes.
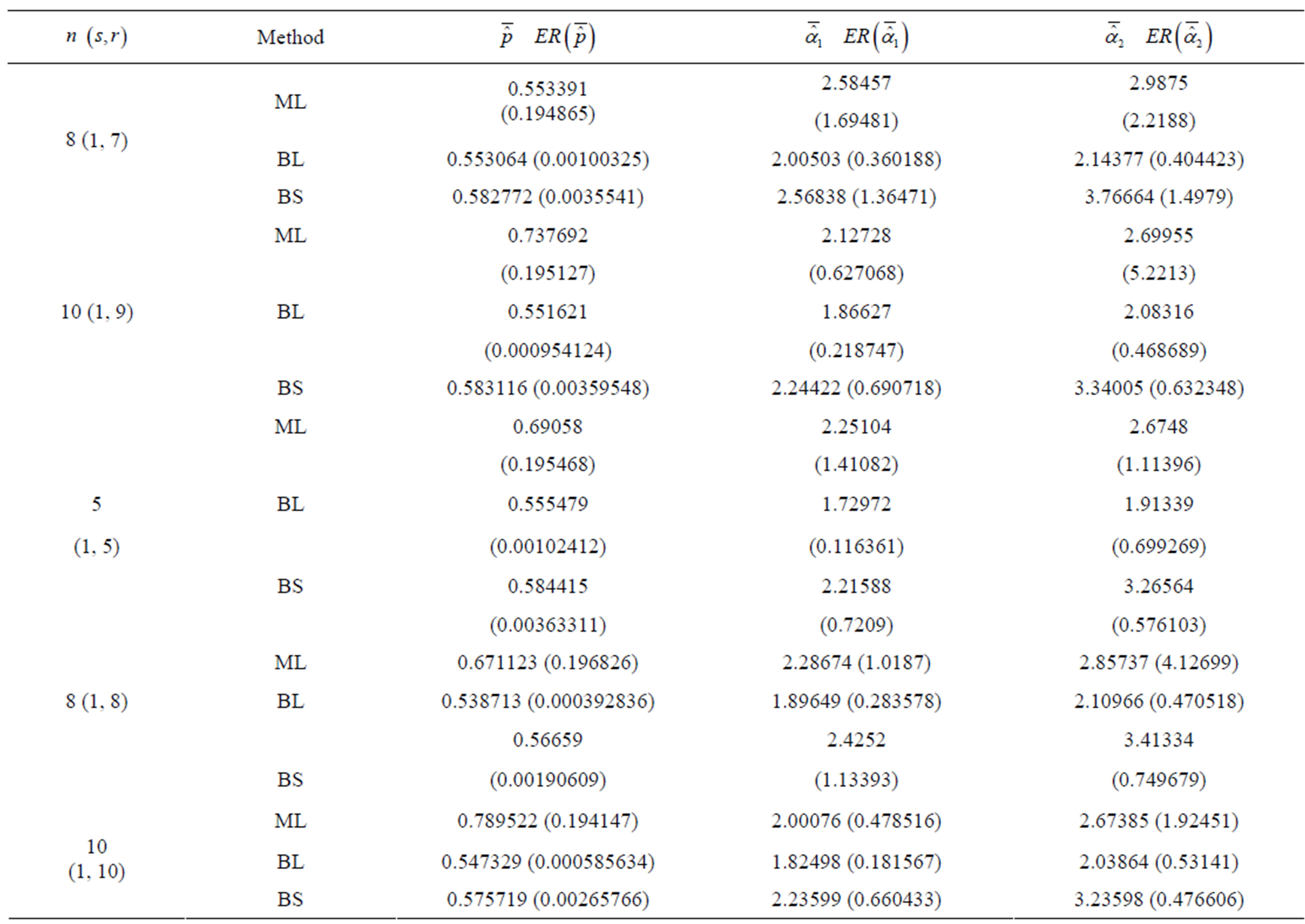
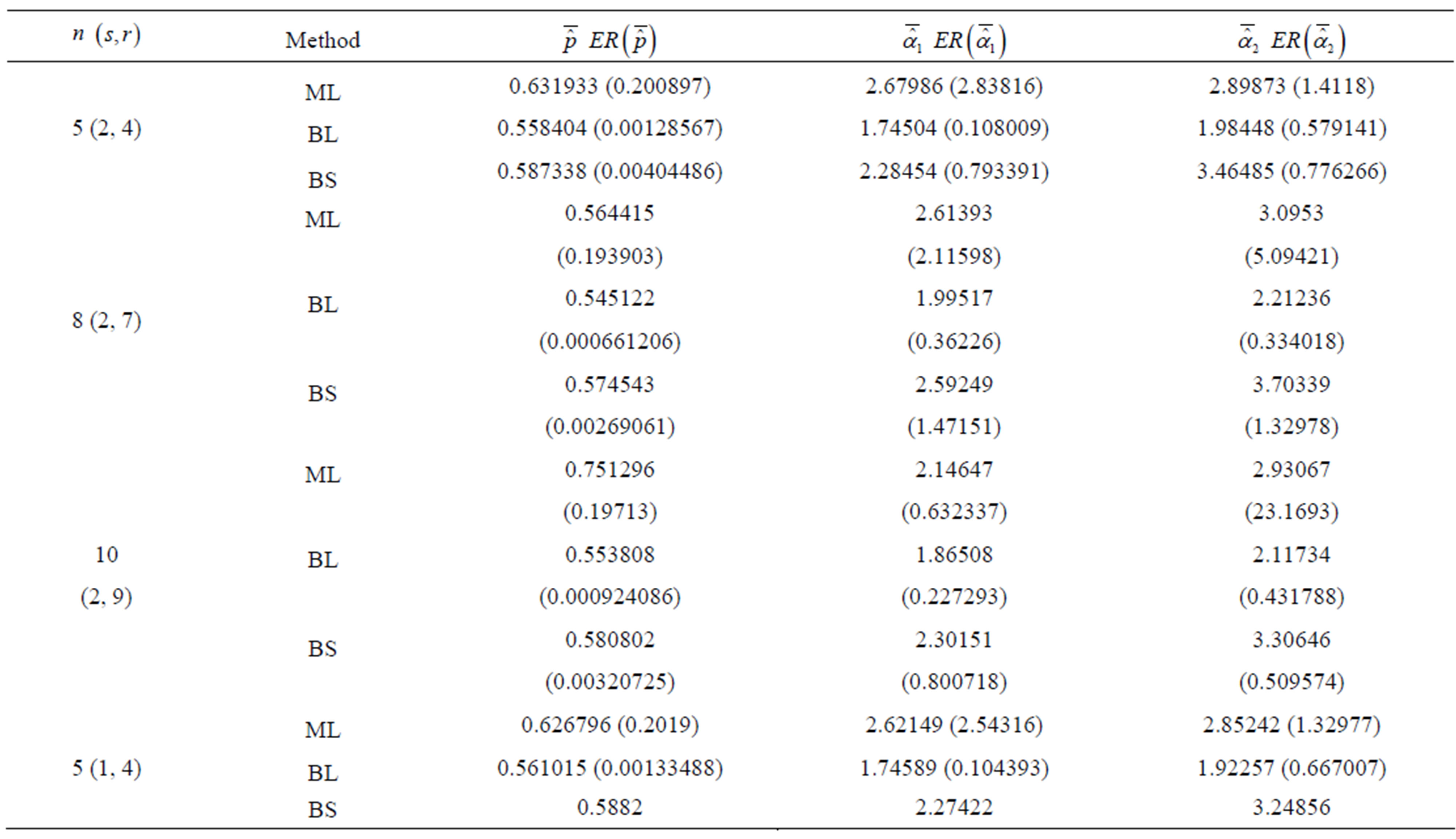
Table 3. (Upper record values) Averages and Estimated Risks (ER) of the estimates of  for different sample
for different sample
in the case of upper record values.
6 Concluding Remarks
1) Estimation of the parameters of the finite mixture model of two Gompertz distributions are considered from a Bayesian approach based on gos’s. A compareson between ML and Bayes estimators, under either a squared error loss or a Linex loss, is made by using a Monte Carlo simulation study in both two cases considering order statistics and upper record values cases.
2) From Tables 1 and 2, we see that in most of the considered cases, the ER’s of the estimates decrease as n increases. In complete sample case, the Bayes estimates of p,  and HRF under Linex loss function have the smallest ER’s as compared with their corresponding estimates under squared error loss function or MLE’, while the ER’s of the Bayes estimates of
and HRF under Linex loss function have the smallest ER’s as compared with their corresponding estimates under squared error loss function or MLE’, while the ER’s of the Bayes estimates of  and RF under squared error loss functions are the smallest estimated risks. For censored samples, the Bayes estimates of p under Linex loss function have the smallest ER’s as compared with their corresponding estimates under squared error loss function or MLE’s. While, the Bayes estimates (against the proposed prior) of
and RF under squared error loss functions are the smallest estimated risks. For censored samples, the Bayes estimates of p under Linex loss function have the smallest ER’s as compared with their corresponding estimates under squared error loss function or MLE’s. While, the Bayes estimates (against the proposed prior) of  and HRF under squared error loss function have the smallest ER’s as compared with their corresponding estimates. It is observed that MLE’s for HRF perform best when sample size n is increased. Also, we note that the MLE’s of
and HRF under squared error loss function have the smallest ER’s as compared with their corresponding estimates. It is observed that MLE’s for HRF perform best when sample size n is increased. Also, we note that the MLE’s of  and RF have the smallest ER’s as compared with Bayes estimates.
and RF have the smallest ER’s as compared with Bayes estimates.
3) From Tables 3 and 4, we see that the Bayes estimates (against the proposed prior) of the parameters and HRF under Linex loss function have the smallest ER's as compared with their corresponding estimates under squared error loss function or MLE’s. While, the Bayes estimates of  (for complete sample) and RF under squared error loss function have the smallest ER’s as compared with both Bayes estimates under Linex loss function or the MLE’s. Also, it is observed that MLE's for RF perform best when sample size n is increased.
(for complete sample) and RF under squared error loss function have the smallest ER’s as compared with both Bayes estimates under Linex loss function or the MLE’s. Also, it is observed that MLE's for RF perform best when sample size n is increased.
4) If the mixing proportion p is known, [2] estimated the parameters  reliability and hazard rate functions based on Types I and II censored samples.
reliability and hazard rate functions based on Types I and II censored samples.