1. Introduction
In the realm of Hyperquaternion algebras, for a choice of generators, the authors presented in detail the multivector structures of the biquaternion algebra or Pauli algebra
, the tetraquaternion algebra
, the Dirac algebra
, and the algebra
respectively in [1] [2] [3] and [4] where
denotes the quaternion algebra described for the first time by Sir William Rowan in 1843. Their symmetric groups are also given; we will cite:
and
respectively for
and
. In particular, more physical applications associated are developed in 3D, special theory of relativity, general theory of relativity, quantum theory, ... The papers of Girard et al. inspire us to deal with the hyperquaternion formulation of the Clifford algebra
with the difference that we combine the results
,
,
and
instead of Clifford’s theorem in order to establish the isomorphism
. We recall Clifford’s theorem used by P. Girard.
If
(m:integer), the Clifford algebra
is the tensor product of m quaternion algebras. If
, the Clifford algebra
is the tensor product of
quaternion algebras and the algebra (
) where
is the product of 2m generators (
) of the algebra
[2]. The entirety of the proof can be seen in [5], p.378 and a modern proof can be found in [2], p.3.
In [6], W.Sproβig gave a brief origin of the term hyperquartenion by saying verbatim the following: “The name hyperquaternion was coined in 1922 by the American mathematician Clarence Lemuel Elisha Moore (1876-1931). Nowadays, there are remarkable works of M.Pitkanen and P.Girard in this field”.
This study of the Clifford Algebra
allows expressing as conformal hyperquaternion algebra the Conic Conformal Geometry Algebra (CCGA) we intend to carry out starting from papers [7] and [8].
Unless otherwise mentioned, throughout this paper
is the tensor product of p quaternion algebras
, i.e.
(p factors).
This paper is structured as follows:
In the first section, which is the introduction, we briefly present some works done on the hyperquaternion algebras, their historical and the central objective of this paper. The aim of the second section is to gather some basic results concerning the quaternion algebras, hyperquaternion algebras and Clifford algebras. In the third section, we first recall the ingredients will be used to show the isomorphism between the hyperquaternion algebra
and the clifford algebra
and we establish an isomorphim of these algebras. We also express the multivector structures of
in this section. In the fourth section, we develop the hyperquaternion algebra for conics.
2. Preliminaries of Clifford Algebras and Hyperquaternion Algebras
2.1. Clifford Algebras
Definition 2.1. Let
be a quadratic vector space over
and
be the tensor algebra of E over
. The quotient algebra
, where
is the ideal generated by all elements of the form
for
, is called the Clifford algebra associated to the quadratic vector space
.
Consider the quadratic space
, this notation means that p basis vectors square to +1 and q basis vectors square to −1. Let
be an orthonormal basis of
,
, for any
. Thus, we have
(1)
We denote the Clifford algebra associated to the quadratic space
by
or
.
Definition 2.2. Let
be the Clifford algebra associated with the quadratic vector space
, the Clifford product of two vectors
is defined by
(2)
where
and
are respectively the interior product and the exterior product of the vectors u and v [1].
It follows from this definition that
(3)
and
(4)
2.2. Clifford Algebra
In this subsection, we are interested in just one particular Clifford algebra,
, which is the principal object of our investigation. We consider
an eight-dimensional vector space over
endowed with a bilinear symmetric and nondegenerate form with signature (+, +, +, +, +, −, −, −), which means that 5 basis vectors square to +1 and 3 basis vectors square to −1. Let
be a basis of
, the Clifford algebra
is the real associative unital algebra generated by the vectors
and
satisfying the relations:
(5)
and
(6)
A basis of the Clifford algebra
can be taken to be
,
.
Definition 2.3. Let
be the Clifford algebra associated with the quadratic vector space
, the products of k generators are called multivectors of grade k, blades of degree k or k-vectors.
Every element of
can split into:
scalar (or 0-vector): 1,
vectors (or 1-vectors):
,
bivectors (or 2-vectors):
,
trivectors (or 3-vectors):
,
quadrivectors (or 4-vectors):
,
(5-vectors):
,
(6-vectors):
,
(7-vectors):
,
pseudoscalar:
.
It is obvious that
is the dimension of the Clifford algebra
and a general element of this algebra is a linear combination of the 256 basis multivectors.
2.3. Quaternion Algebra
Definition 2.4. The quaternion algebra over
, denoted
, is an associative non-commutative four-dimensional algebra over
generated by
and k such that
.
A general element of the quaternion algebra
can be written as a linear combination of
and
,
with
.
2.4. Hyperquaternion Algebras
2.4.1. Definition and Examples
Definition 2.5. Let
be a quaternion algebra over the real field
, a tensor product of
(or a subalgebra thereof) is called a hyperquaternion algebra [9] .
As hyperquaternion algebras, we can cite the biquaternion algebra or Pauli algebra
, the tetraquaternion algebra
, the Dirac algebra
,
, ...
2.4.2. Hyperquaternion Algebra
The hyperquaternion algebra concerned in this paper is
.
Definition 2.6. All system
such that
is said to be quaternionic system.
Fixing four quaternionic systems
,
,
and
, a basis of the hyperquaternion algebra
can be expressed as follows:
(7)
Each quaternionic system commutes with the three others. A basis of the hyperquaternion algebra
contains
elements.
Explicitly,
(8)
An element of
can be expressed in the form
(9)
where
, i.e., q can be viewed as a quaternion with coefficients in
. Similarly
can be expressed as quaternion with tetraquaternionic coefficients i.e.
(10)
Combining the expressions (2) with (3), we obtain
(11)
with
.
Obviously
can represented as a quaternion with quaternionic coefficients,
(12)
Theorefore, q will be expressed as follows:
(13)
with
.
We express the quaternion
with real
coefficients,
(14)
where
.
At the last, an element
is a linear combination of 256 elements of a basis of
,
(15)
Definition 2.7. Let
be a hyperquaternion algebra, the product of two elements of
is the product in a tensor product of quaternion algebras, it is called hyperquaternion product of
.
Note that the hyperquaternion product, of
, is defined independently of the choice of generators of the Clifford algebra
[2].
Since the dimension of the hyperquaternion algebra
is very large, it would be desirable to use the computer to perform the calculations in this algebra (
).
3. Multivector Structure of
The principal operations in the hyperquaternion algebra
(interior product, exterior product, duality, ...) are defined from its multivector structure which depends on generators but the hyperquaternion product is independent of the choice of generators.
3.1. Isomorphism
In order to establish the expected result in this section, we use the isomorphism
(16)
and the isomorphism between the hyperquaternion algebra of tetraquaternions and the algebra of 4 × 4-matrices with entries in
and the below two lemmas.
Lemma 3.1. Let
be a Clifford algebra associated with the quadratic space
. Then the following isomorphism holds
(17)
where either
or
, and
denotes the usual tensor product.
Proof. The entirety of the proof can be seen in [10], p.90.
Lemma 3.2. If m and n are positive integers then
(18)
where
designs the algebra of
-matrices with entries in
.
Proof. The entirety of the proof can be seen in [5], p.378 and a modern proof can be found in [2], p.3.
Theorem 3.3. Let
be the quaternion algebra, the Clifford algebra
is isomorphic to the four fold-tensor products
.
Proof. We recall first the isomorphism
which in combination with the lemma (3.1) leads to
(19)
Using the last isomorphism, we set
(20)
(21)
(22)
The substitution of (21) into (20) leads to
(23)
and the substitution of (22) into (23) gives
(24)
From the isomorphism
and the associativity of the tensor product, we can write
(25)
In virtue of the second lemma above, we obtain
(26)
Finally, the isomorphism
induces
(27)
Hence,
(28)
The Clifford algebra
generated by
and
is isomorphic to the hyperquaternion algebra
.
According to the isomorphism
, we make the following choice of the eight generators of the hyperquaternion algebra
:
(29)
We opt for the identification of the basis vectors generators of
below:
(30)
It is easy to show that the hyperquaternion algebra
is isomorphic to the set of real matrices
. Since
, it is obvious that
(31)
3.2. Multivector Structure of
Definition 3.4. The product of k generators of the hyperquaternion algebra
is called multivector of rank k or polyvector of rank k or k-vector.
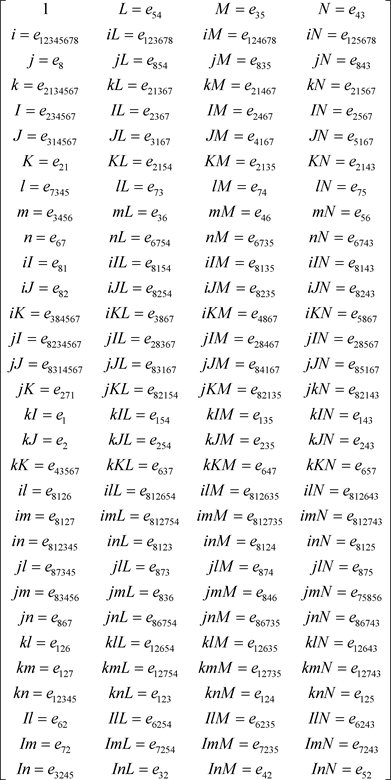
We denote by
the product of k vectors
. As shown in the table below describing the multivector structure of the hyperquaternion algebra
, a basis of it has:
1 scalar (or 0-vector): 1,
8 vectors (or 1-vectors):
28 bivectors (or 2-vectors):
56 trivectors (or 3-vectors):
70 quadrivectors (or 4-vectors):
56 multivectors of rank 5:
28 multivectors of rank 6:
8 multivectors of rank 7:
1 pseudoscalar:
.
It is obvious that
is the dimension of the hyperquaternion algebra
and a general element of this algebra is a linear combination of the 256 basis multivectors as in (15).
4. Hyperquaternion Algebra for Conics
In this section, we relate the conic sections expressed in CCGA (Conic Conformal Geometric Algebra) developed in [7], [8] and [11] to their hyperquaternion Clifford algebra presentation.
4.1. Conformal Hyperquaternion Algebra
Firstly, we recap of what we have done above by recalling that the hyperquaternion algebra
is generated by the following selected basis of the vector space
:
Consider now the three first null vectors called the infinity’s points and defined from the six vectors
and
as follows:
(32)
The three others null vectors, called the origins points, are
(33)
So, we built a new basis
of the vector space
composed of the Euclidean basis
of
and the six null vectors
and
, where
.
The new choice of the generators (
and
) respects the hyperquaternion product of
which is defined independently of any specific choice of the generators and the multivector structure of
changes.
Definition 4.1. Let
be a quaternion algebra, the hyperquaternion algebra, generated by the basis vectors
and
of the vector space
, is called the conformal hyperquaternion algebra
.
Note that the conformal hyperquaternion algebra
is the hyperquatenion algebra
with another multivector structure and the hyperquaternion product is the same in the two algebras.
We perform easily the inner product of the generators
and
,
(34)
each generator
is isotropic, it squares to zero
(35)
(36)
(37)
It is easy to establish the following
(38)
(39)
(40)
We recall that for any vectors u and v, their inner product can be written
. By using this last relation, we compute the following
(41)
Similarly, we establish the following,
(42)
Thus for any
,
(43)
We define two others null vectors,
(44)
and
(45)
We can easily prove that the vectors
and
are isotropics i.e.
(46)
(47)
and their inner product is
(48)
In the following subsection, we use the fact that the Clifford algebra
is the geometric algebra for conic (CGA) and the isomorphism
to provide the hyperquaternion formulation of conic sections.
4.2. Hyperquaternion Representations IPNS
Consider the conformal embedding
,
(49)
Proposition 4.2. Let
be a basis of the Euclidean vector space
,
be an embedding and
, the embedded point
of
is isotropic.
Proof. It is obvious, a straightforward calculations of the inner product give the result
This result confirms the fact that in conformal geometric algebra (CGA), the inner product of any point with itself is zero.
Proposition 4.3. Let
be a basis of the Euclidean vector space
,
be an embedding and
, the subspace of dimension 1 generated by the null vector
is orthogonal to any embedded point
of
.
Proof. For any
a straightforward computation of the inner product show the relation
.
Definition 4.4. Let X be an element of the Euclidean space
, A an 1-blade of the hyperquaternion algebra
and the conformal embedding
, the inner product null space of A, denoted by
, is defined as follows
.
In order the define the inner product null space of an 1-blade
(50)
we perform the inner product of
and A as expressed above,
(51)
the inner product null space of A is the set,
(52)
and the geometric entity corresponding to the above equation,
(53)
is a conic section.
An elegant equation of a conic section is given by
(54)
obtained by laying
and
.